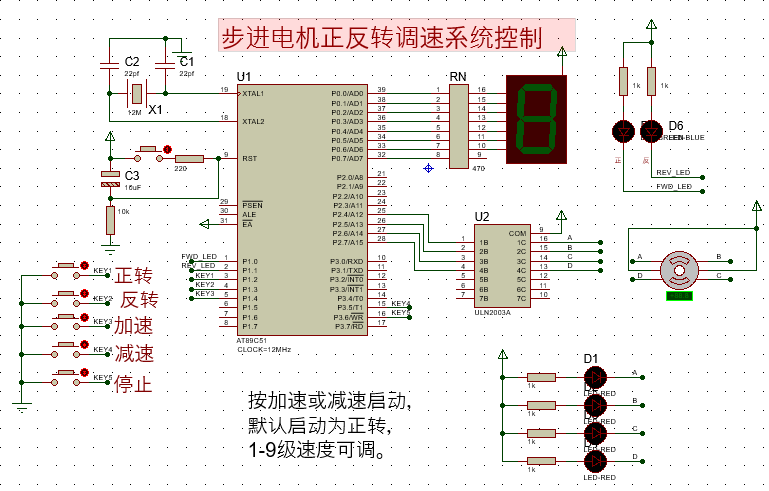
【Proteus仿真】基于51单片机的步进电机正反转调速系统控制







于 2020-12-09 22:34:33 首次发布
 8462
2594
8462
2594











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 该专栏为热销专栏榜 第41名
该专栏为热销专栏榜 第41名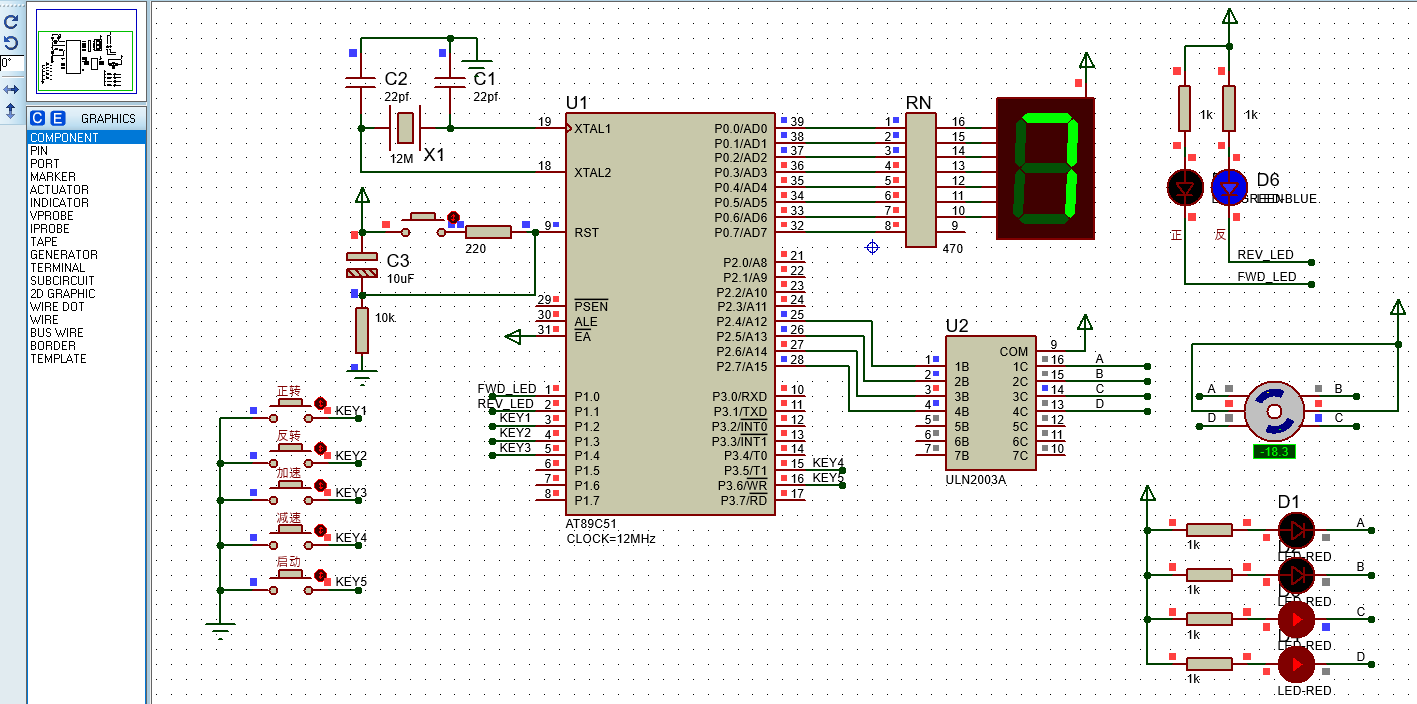

 订阅专栏 解锁全文
订阅专栏 解锁全文



















