







简介:本文详细解读了在Simulink环境下电压源逆变器(VSI)控制感应电机(IM)的实现方法。首先解释了VSI控制核心原理,然后分别介绍了电压源逆变器模型、PWM调制器、感应电机模型和控制器在Simulink中的构建。通过“VSI.mdl”文件演示了这些模块的集成和交互,以及如何通过仿真优化控制策略。最后,讨论了故障检测与保护机制,强调了该实践平台对于电力驱动领域设计和分析的重要性。 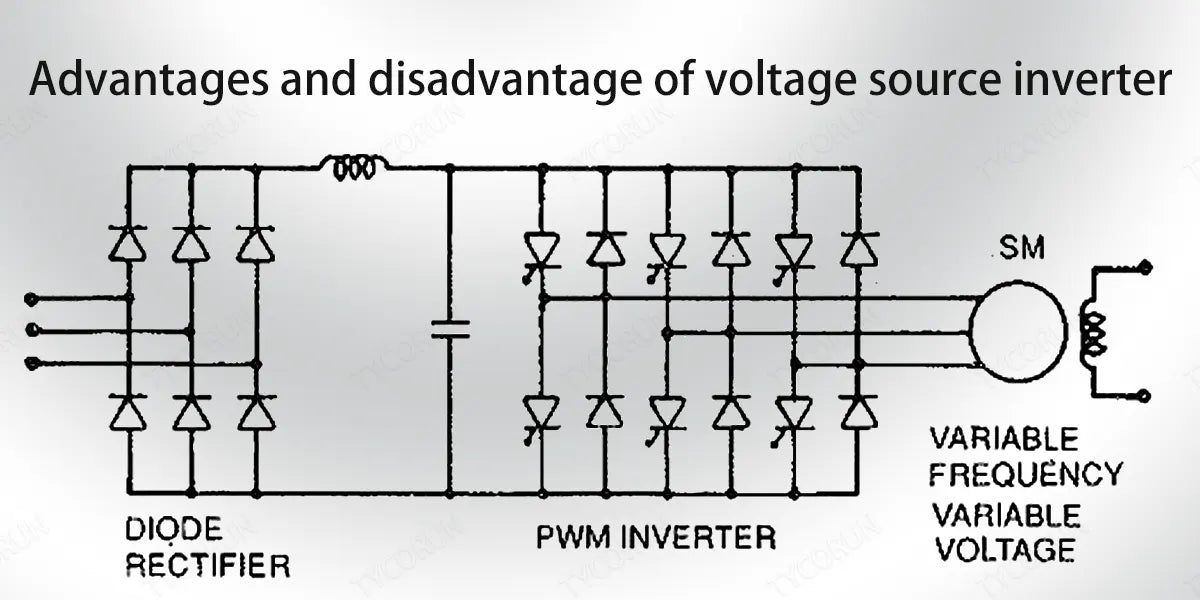
1. 电压源逆变器(VSI)控制技术
1.1 VSI技术概述
电压源逆变器(VSI)是电力电子领域中的关键技术,它通过控制电力电子开关器件来将直流电转换为交流电。VSI能够精确控制输出电压的频率和幅值,广泛应用于电机驱动、太阳能逆变和UPS系统等。控制技术的核心在于优化电能的转换效率并确保输出波形的质量。
1.2 VSI控制技术的发展
VSI控制技术的发展经历了从简单的方波控制到复杂的脉宽调制(PWM)技术的演变。当前,高级PWM技术如空间矢量PWM(SVPWM)被广泛应用于提高电能转换效率和减小输出波形失真。控制策略的优化,包括控制算法的改进和实时反馈技术的应用,进一步提高了系统的性能与可靠性。
1.3 VSI控制技术的挑战与未来
虽然VSI控制技术已经相对成熟,但随着应用需求的不断提高,如对高动态响应和低谐波含量的要求,控制技术仍面临挑战。未来,多变量控制策略和人工智能技术的引入将为VSI控制技术带来新的突破,进一步拓展其在各类电力驱动系统中的应用前景。
2. 感应电机(IM)调速系统
2.1 感应电机的基本工作原理
2.1.1 电机结构与工作方式
感应电机(Induction Motor,IM)的工作原理基于电磁感应现象。电机主要由定子和转子两部分组成。定子通常由多相绕组构成,而转子一般分为鼠笼式和绕线式两种结构。鼠笼式转子由一系列导条和两端的环形导体组成,形成一个类似于鼠笼的结构。当定子绕组通入交流电后,会在定子和转子之间产生旋转磁场,从而在转子导体中感应出电流,该电流与磁场相互作用产生转矩,推动转子旋转。
以下是感应电机基本组件的图示:
graph TB
A[定子] -->|电磁感应| B[转子]
C[鼠笼式结构] --> D[导条]
D --> E[环形导体]
E --> B
A -->|产生| F[旋转磁场]
F --> B
G[绕线式结构] --> H[转子绕组]
H --> B
2.1.2 电机参数与性能指标
感应电机的性能可以通过多个参数来描述,其中重要的包括:
- 额定功率 :电机在额定运行条件下可以长期安全运行的最大功率。
- 额定电压 :指电机正常运行时应施加的电压。
- 额定电流 :电机在额定功率和额定电压下运行时的电流。
- 额定转速 :电机在额定功率和额定电压下空载运行时的转速。
- 转矩特性 :电机能够提供的转矩随转速变化的关系。
- 效率 :电机输出功率与输入功率之比,通常在不同负载下会有所不同。
- 功率因数 :电机输入功率中有效功率与视在功率的比值。
电机的性能指标不仅取决于电机的设计,还受到供电质量、工作环境以及负载条件等因素的影响。正确选择电机参数对于确保系统的稳定和高效运行至关重要。
2.2 调速系统的设计与实现
2.2.1 调速系统的主要类型与特点
感应电机的调速方法主要有以下几种:
- 变频调速 (Variable Frequency Drive, VFD):通过改变供电的频率来改变电机的同步速度,进而实现调速。这种方法能够提供平滑的调速特性且调速范围广,是工业中应用最为广泛的一种调速方式。
- 变极调速 :通过改变电机绕组的极对数来改变电机同步速度,从而实现调速。这种方法通常适用于低速范围内的简单应用。
- 滑差控制 :通过改变转子电路的电阻来控制电机的滑差率,进而调节转速。这种方法一般用于小功率电机的调速。
2.2.2 调速策略的理论基础
调速系统设计的基础在于理解感应电机的转矩-转速特性曲线。电机的转矩与转速的关系是非线性的,电机的运行特性可以通过以下公式表示:
- 转矩公式 :T = k(φI2r)sinφ,其中 T 是转矩,φ 是磁通量,I2r 是转子电流,φ 是转子电流和磁通量之间的相位差,k 是与电机结构有关的常数。
- 转速公式 :n = (1 - s)n_s,其中 n 是转子速度,s 是滑差,n_s 是同步速度。
通过调节上述参数,我们可以实现对电机调速的控制。变频调速通过改变频率f和电压V来同时或分别调节转速和转矩,而变极调速和滑差控制则通过改变电机的极对数或转子电阻来调节转矩。
2.2.3 调速性能的实验分析与评估
为了验证调速策略的有效性,通常需要对电机的调速性能进行实验分析和评估。这涉及到对电机在不同工作条件下性能参数的记录和对比分析。
实验评估的关键步骤包括:
- 设置基准测试条件 :确保电机在额定条件下运行,记录基准数据,包括转矩、转速、效率和功率因数等。
- 逐步改变控制参数 :通过调整变频器的输出频率和电压,或者改变转子电路的电阻,观察电机参数的变化。
- 记录和比较数据 :记录电机在不同调速条件下的运行数据,并与基准数据进行比较,评估调速策略对性能的影响。
- 性能评估 :基于实验数据,评估调速策略的效率、调速范围、响应速度以及稳定性等性能指标。
通过这些实验分析,工程师可以决定最适宜的调速方案,以满足特定应用的需求。
在下一章节中,我们将深入探讨感应电机调速系统设计中的一些关键环节,并展示如何通过Simulink进行建模与仿真,以进一步优化调速策略。
3. Simulink模型构建与集成
3.1 Simulink环境与模型构建
3.1.1 Simulink界面介绍
Simulink是一种基于MATLAB的图形化编程环境,广泛应用于多域动态系统和嵌入式系统的仿真和基于模型的设计。一个典型的Simulink界面包含多个窗口和面板,如模型窗口、库浏览器、模型配置参数窗口等。用户可以通过拖放不同的功能模块来构建系统模型,并通过设置模块参数进行仿真。
Simulink模型窗口主要由图形编辑器和模型浏览器组成。图形编辑器允许用户直观地构建模型,而模型浏览器则提供了一个层次化的视图来查看模型中的所有元素。Simulink库浏览器包含了大量预构建的模块库,如信号源、信号处理、数学运算等,方便用户根据需求拖拽至模型窗口。
3.1.2 基本组件模块的使用
Simulink模型构建的基础是各种组件模块。以下是构建简单模型时常用的几个模块及其应用方法:
- 信号源模块(Sources) :提供不同类型的输入信号,例如阶跃信号(Step)、正弦波信号(Sine Wave)等。
- 信号处理模块(Math Operations) :执行各种数学运算,如加法(Sum)、积分(Integrator)、乘法(Product)等。
- 信号输出模块(Sinks) :收集和显示仿真结果,例如示波器(Scope)、输出到工作空间(To Workspace)等。
例如,构建一个简单的数学模型,可以使用Sine Wave模块产生一个正弦波信号,通过Sum模块将其与一个常数相加,最后使用Scope模块观察结果。模型构建后,需要设置每个模块的参数,如信号频率、振幅、相位等,以符合实际仿真需要。
3.2 模型集成与仿真测试
3.2.1 模块间的信号传递与集成
在Simulink中,模块间的信号传递是通过连线实现的。这些连线代表了数据流的方向和路径,保证了模型中各个模块之间能够正确交换信息。信号传递的基本原则是:
- 信号从源模块流向接收模块。
- 连线代表信号通道,任何信号的输入和输出都需要有明确的对应关系。
Simulink提供了一套丰富的信号类型和数据类型,包括标量、向量、矩阵等。在集成模块时,必须确保信号类型的一致性。如果信号类型不匹配,Simulink会给出错误提示。
信号传递的集成需要考虑以下几个方面:
- 信号维度 :不同模块可能需要不同维度的输入信号,如一维向量、二维矩阵等。
- 信号速率 :Simulink支持不同速率的信号处理,包括连续时间和离散时间信号。
- 信号数据类型 :对于数值计算,需要指定信号的数据类型,如双精度浮点数、定点数等。
3.2.2 仿真设置与结果分析
仿真设置包括仿真参数的配置和仿真时间的定义。仿真参数配置在模型配置参数窗口中完成,涉及求解器类型、步长大小、仿真的起始和结束时间等关键参数。
- 求解器类型 :选择适合的求解器非常关键。对于连续系统,常用的有ode45(四阶/五阶Runge-Kutta方法);对于离散系统,常用的有discrete求解器。
- 仿真步长 :步长大小影响仿真精度和计算量。对于快速动态变化的系统,需要较小的步长;而对于慢速变化的系统,可以使用较大的步长以提高仿真效率。
仿真结束后,使用Scope模块或其他信号输出模块进行结果分析。分析时,需要注意以下方面:
- 信号的稳定性和准确性 :确保信号达到了预期的稳定状态,并且没有出现数值上的不稳定或错误。
- 动态响应特性 :分析系统对于输入信号的响应时间、超调量、上升时间等指标。
- 误差分析 :比较仿真结果与理论值或实验数据,分析误差来源及改进方向。
接下来,我们以一个具体的仿真实例,进一步详细说明如何使用Simulink进行模型构建和仿真测试。
4. ```
第四章:PWM调制技术应用
4.1 PWM技术的原理与实现
4.1.1 PWM的基本概念与数学模型
脉冲宽度调制(Pulse Width Modulation,简称PWM)是一种常见的技术,用于控制电力电子设备,比如电压源逆变器(VSI)。PWM技术通过改变脉冲的宽度来调节输出功率的平均值,以实现对电机速度、位置等参数的精确控制。在数学模型上,PWM信号可以由三个基本参数定义:载波频率、调制波频率和调制比。
载波频率(f_c)是PWM信号的频率,其决定了开关频率的高低,影响着系统的动态响应。调制波频率(f_m)则是用来调制PWM信号的基波频率,它与系统的输出特性密切相关。调制比(m)定义为调制波峰值与载波峰值的比值,通常在0到1之间变化。
一个典型的PWM信号可以用以下数学公式描述:
PWM(t) = (A_m + A_c * sin(2πf_m t)) * sin(2πf_c t)
其中 A_m 是调制波的振幅, A_c 是载波的振幅。
4.1.2 不同PWM技术的比较与应用
PWM技术种类繁多,常见的有三种:单极性PWM、双极性PWM和空间矢量PWM。每种PWM技术都有其特点和应用场景。
单极性PWM技术主要特点是开关器件在一个周期内只在正向或负向开关一次,从而减小了开关损耗。双极性PWM则在一个周期内进行正反向切换,提供了更灵活的控制,但增加了开关损耗。空间矢量PWM技术则是基于矢量控制理论,通过合成电压空间矢量的方式,实现更高效的电机控制,尤其适用于感应电机和永磁同步电机。
在实际应用中,选择哪种PWM技术取决于系统需求、成本和控制的复杂程度。例如,在对效率要求极高的场合,空间矢量PWM技术可能是首选。而在对成本敏感的应用中,可能会选择单极性或双极性PWM。
4.2 PWM技术在VSI中的应用
4.2.1 PWM调制策略的设计
在VSI中实现PWM调制策略设计,关键在于确定调制波的类型、选择合适的载波频率以及计算调制比。调制波通常根据所需的输出特性来设计,如正弦波、方波或阶梯波等。载波频率的选择则需要在开关损耗和响应速度之间进行权衡。调制比的确定则与VSI输出电压的调制深度直接相关。
为了设计PWM调制策略,工程师首先需要定义系统的性能指标,如输出电压的稳定性和精确度、系统的响应时间等。然后,根据性能指标,选择合适的数学模型和参数进行模拟,以获得最佳的调制效果。
4.2.2 调制策略对系统性能的影响
PWM调制策略的合理设计直接影响着逆变器的输出性能。调制策略不仅影响输出电压和电流的波形,还影响系统的总体效率和稳定性。例如,合理的调制策略可以减少电压和电流的谐波,从而提高电机的控制精度和运行效率。
此外,调制策略对系统的过载能力和故障保护机制也有重要影响。通过合适的调制策略设计,可以在不增加额外硬件成本的情况下,通过软件控制提高系统的抗干扰能力和故障处理能力。
为了分析调制策略对系统性能的影响,通常需要进行实验测试。通过改变载波频率、调制比等参数,观察并记录系统的输出波形、效率和稳定性能的变化,从而得出最优化的调制策略。
在本段中,我们深入探讨了PWM调制技术的原理,并且分析了PWM技术在VSI中的应用以及其对系统性能的影响。我们使用了清晰的结构和分层次的内容,以确保文章内容连贯丰富,分析细致入微,并且总结精炼。通过将技术内容与实际应用相结合,本章节不仅对初学者有启发性,而且对资深专业人士也有一定的深度。
# 5. 控制器设计与策略优化
在电力电子系统中,控制器的设计和实施是确保整个系统性能与稳定性的关键。本章节将探讨控制器设计的理论基础,并对控制策略的实施与优化进行深入分析。
## 5.1 控制器设计的理论基础
控制器作为系统的核心部分,其设计需要充分考虑系统的动态响应、稳定性和抗干扰能力。设计一个好的控制器,首先要理解控制系统的基本组成和工作原理。
### 5.1.1 控制系统的基本组成
控制系统通常由以下几个部分组成:
- **传感器**:检测系统状态并转换成电信号。
- **控制器**:根据参考输入和反馈信号计算误差,并产生控制动作。
- **执行器**:接收控制器输出信号并驱动系统。
- **反馈回路**:将输出信号反馈到控制器输入端,形成闭环控制系统。
### 5.1.2 控制策略的理论模型与分析
控制策略的设计是基于对系统模型的精确分析。对于不同的应用,可采用PID控制、状态反馈控制、自适应控制等策略。在设计时,需要考虑以下几个关键因素:
- **系统稳定性**:确保系统在各种工况下都能稳定运行。
- **响应速度**:系统对指令或扰动的响应速度。
- **抗干扰能力**:系统在面对外部干扰时的鲁棒性。
- **误差控制**:减小系统的稳态误差和动态误差。
## 5.2 控制策略的实现与优化
在理论基础上,控制策略的实现与优化是提升系统性能的必经之路。这涉及到实际的控制器参数调整,以及系统性能的综合评估。
### 5.2.1 控制器参数的调整与优化
控制器参数的优化通常需要通过实验或仿真的方式来进行。常用的方法有Ziegler-Nichols方法、遗传算法优化等。举例来说,对于PID控制器:
```matlab
% 假设系统传递函数为 G(s) = 1/(s^2 + 5s + 6)
% 设定初始PID参数为P=1, I=0.01, D=0.001
s = tf('s');
G = 1/(s^2 + 5*s + 6);
Kp = 1; Ki = 0.01; Kd = 0.001;
PID = pid(Kp, Ki, Kd);
T = feedback(PID*G, 1);
step(T)
通过仿真结果分析,可以判断系统的瞬态响应和稳态误差,进而调整PID参数以达到预期性能。
5.2.2 系统性能的综合评估与改进
综合评估系统性能时,应包括但不限于:
- 时间响应指标 :如上升时间、峰值时间、超调量和调整时间。
- 频率响应指标 :如相位裕度和增益裕度。
- 鲁棒性分析 :在不同工作条件和参数变化下系统性能的稳定性。
- 扰动响应 :系统对负载变化和其他干扰的响应特性。
上述分析有助于识别系统性能的不足之处,并进行必要的改进。
graph LR
A[开始控制器设计] --> B[系统建模]
B --> C[选择控制策略]
C --> D[仿真分析与参数调整]
D --> E[控制策略优化]
E --> F[实际测试与验证]
F --> G[系统性能综合评估]
G --> H[完成控制器设计与优化]
综上所述,控制器的设计与策略优化是一个迭代的过程,包含理论分析、仿真测试和实际验证等多个阶段。每个环节都对最终系统的稳定性和性能有着不可忽视的影响。通过对控制器参数的精细调整和系统的全面评估,可以实现对电力电子系统的有效控制和性能提升。
简介:本文详细解读了在Simulink环境下电压源逆变器(VSI)控制感应电机(IM)的实现方法。首先解释了VSI控制核心原理,然后分别介绍了电压源逆变器模型、PWM调制器、感应电机模型和控制器在Simulink中的构建。通过“VSI.mdl”文件演示了这些模块的集成和交互,以及如何通过仿真优化控制策略。最后,讨论了故障检测与保护机制,强调了该实践平台对于电力驱动领域设计和分析的重要性。

















 1009
1009

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









