







 本文汇总了8个LiDAR点云数据集,包括WHU-TLS、Oakland 3-D、Paris-rue-Madame等,覆盖各种应用场景,适用于点云检测、分割和分类研究。每个数据集均附带详细信息和下载链接,为相关领域的研究提供宝贵资源。
本文汇总了8个LiDAR点云数据集,包括WHU-TLS、Oakland 3-D、Paris-rue-Madame等,覆盖各种应用场景,适用于点云检测、分割和分类研究。每个数据集均附带详细信息和下载链接,为相关领域的研究提供宝贵资源。
图片来源于网络
激光雷达技术(“光探测和测距”)在遥感界蓬勃发展,应用已较为广泛。例如空中激光扫描(ALS),可用于大规模建筑、道路和森林测量;地面激光扫描(TLS),可用于室内外环境中更详细但速度较慢的城市测量;移动激光扫描(MLS)精度比TLS低,但由于传感器安装在同一辆车上而具有更高的效率。

图片来源于网络
随着这些技术发展,近年来可用的三维地理数据和处理技术数量激增。针对三维城市点云的分析,已有许多半自动和自动的方法。这是一个有着良好发展前景的研究领域。然而,对于最佳的检测、分割和分类方法还没有达成共识。因此,小编推荐8个LiDAR数据集供大家使用,希望不断提出新的检测、分割和分类方法。
本期分享的LiDAR数据集如下:
1. WHU-TLS点云数据集
2. Oakland 3-D点云数据集
3. Paris-rue-Madame数据集
4. IQmulus & TerraMobilita数据集
5. District of Columbia数据集
6. semantic3d数据集
7. Paris-Lille-3D数据集
8. DublinCity数据集
 WHU-TLS点云数据集
WHU-TLS点云数据集
武汉大学空间智能研究所课题组结合近十年来的数据积累,联合慕尼黑工业大学、芬兰大地所、挪威科技大学、代尔夫特理工大学发布全球最大规模和最多样化场景类型的TLS点云配准基准数据集。
本次公开的WHU-TLS基准数据集涵盖了地铁站、高铁站、山地、森林、公园、校园、住宅、河岸、文化遗产建筑、地下矿道、隧道等11种不同的环境,共包含115个测站、17.4亿个三维点以及点云之间的真实转换矩阵。此外,该基准数据集也为铁路安全运营、河流勘测和治理、森林结构评估、文化遗产保护、滑坡监测和地下资产管理等应用提供了典型有效数据。
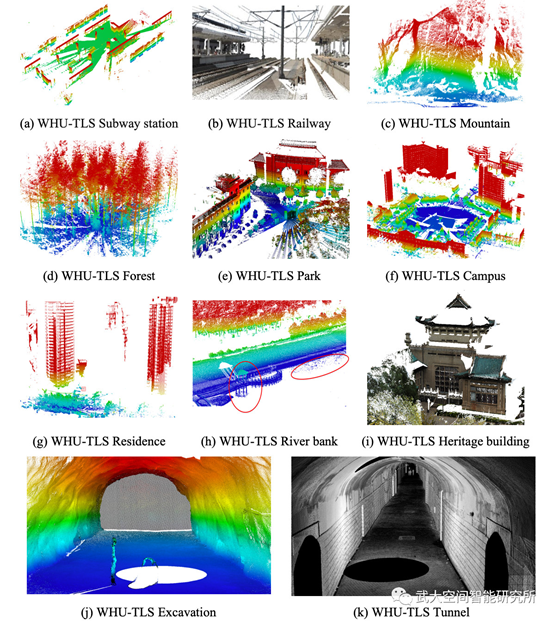
图1 WHU-TLS基准数据集
下载地址:
http://3s.whu.edu.cn/ybs/en/benchmark.htm
参考文献:
Dong Z., Liang F., Yang B., Xu Y., Zang Y., Li J., Wang Y., Dai W., Fan H., Liang X., Stilla U., 2020. Registration of large-scale TLS Point Clouds: A Review and Benchmark. ISPRS J. Photogramm. Remote Sens. (In press)
Oakla
nd 3-D点云数
据集
Oakland 3-D数据是使用Navlab11和侧视的LMS激光扫描仪收集的。数据采集点位于宾夕法尼亚州匹兹堡奥克兰市的芝加哥大学校园。数据以ascii格式提供:x, y, z标签置信度,每行一点,空格作为分隔符。还提供了相应的vrml文件(.wrl)和标签计数文件(.stats)。数据集由两个子集(part2,part3)组成,每个子集有自己的本地参考帧,其中每个文件包含10万个三维点。对训练集/验证集和测试集进行了筛选,并将其从44个标签重新映射到5个标签中。
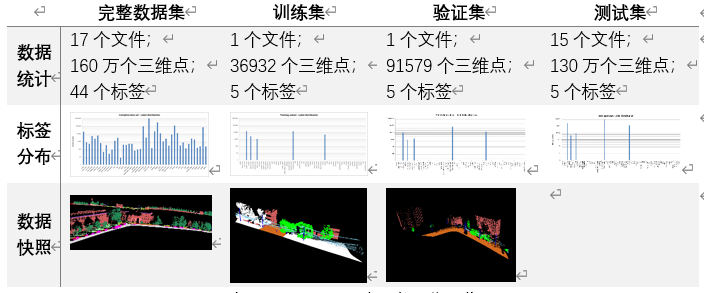
图2 Oakland 3-D点云数据集概览
下载地址:
http://www.cs.cmu.edu/~vmr/datasets/oakland_3d/cvpr09/doc/
参考文献:Daniel Munoz, J. Andrew (Drew) Bagnell, Nicolas Vandapel and Martial HebertConferen
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1259
1259

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









