







 本文介绍了相机畸变的两种主要类型:径向畸变(包括枕形和桶形)及切向畸变,并探讨了它们的成因。重点解析了径向畸变模型,解释了畸变公式的由来。同时,讨论了深度相机的畸变,包括二维平面畸变和深度畸变,并提出直接补偿法进行矫正,强调了矫正条件与实际应用的关系。
本文介绍了相机畸变的两种主要类型:径向畸变(包括枕形和桶形)及切向畸变,并探讨了它们的成因。重点解析了径向畸变模型,解释了畸变公式的由来。同时,讨论了深度相机的畸变,包括二维平面畸变和深度畸变,并提出直接补偿法进行矫正,强调了矫正条件与实际应用的关系。
相机畸变主要分为两种,径向畸变与切向畸变。
(1)径向畸变(枕形、桶形):光线在远离透镜中心的地方比靠近中心的地方更加弯曲。
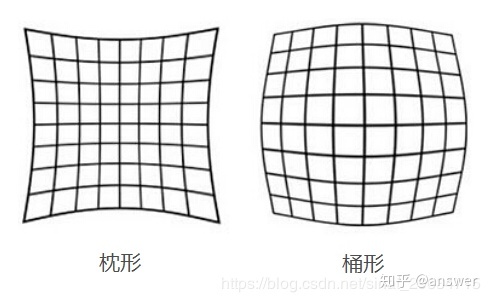
上图就是径向畸变的两种形式,其产生的原因是()。
(2)切向畸变:透镜不完全平行于图像平面,即sensor装配时与镜头间的角度不准。
本文主要谈谈径向畸变模型以及深度相机畸变模型。
- 径向畸变矫正
很多资料都介绍了径向畸变模型,很多都是上来就是模型公式:

不懂的人看了真是不知所云,为什么畸变模型是这样的,而不是那样的,本文我将用自己理解的方式介绍一下径向畸变模型的具体内容。
上面的公式
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3155
3155











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









