







单阶段物体检测算法:
早期的物体检测算法,无论是一步式的,还是两步式的,通常都是在Backbone的最后一个stage(特征图分辨率相同的所有卷积层归类为一个stage)最后一层的特征图,直接外接检测头做物体检测。此种物体检测算法,可以称之为单stage物体检测算法。
由于单stage物体检测算法中,Backbone的最后一个stage的stride通常是32,导致输出的特征图分辨率是输入图片分辨率的1/32,太小,不利于物体检测,因此单stage的物体检测算法,一般会将最后一个stage的MaxPooling去掉或者将stride为2的conv改为stride为1的conv,以增大最后一个分辨率。
FPN时代:
后来研究发现,单stage物体检测算法中,无法用单一stage的特征图同时有效的表征各个尺度的物体,因此,后来物体检测算法,就逐渐发展为利用不同stage的特征图,形成特征金字塔网络(feature parymid network),表征不同scale的物体,然后再基于特征金字塔做物体检测,也就是进入了FPN时代。
特征图金字塔网络FPN(Feature Pyramid Networks)是2017年提出的一种网络,FPN主要解决的是物体检测中的多尺度问题,通过简单的网络连接改变,在基本不增加原有模型计算量的情况下,大幅度提升了小物体检测的性能。
低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。另外虽然也有些算法采用多尺度特征融合的方式,但是一般是采用融合后的特征做预测,
一、解构物体检测各个阶段
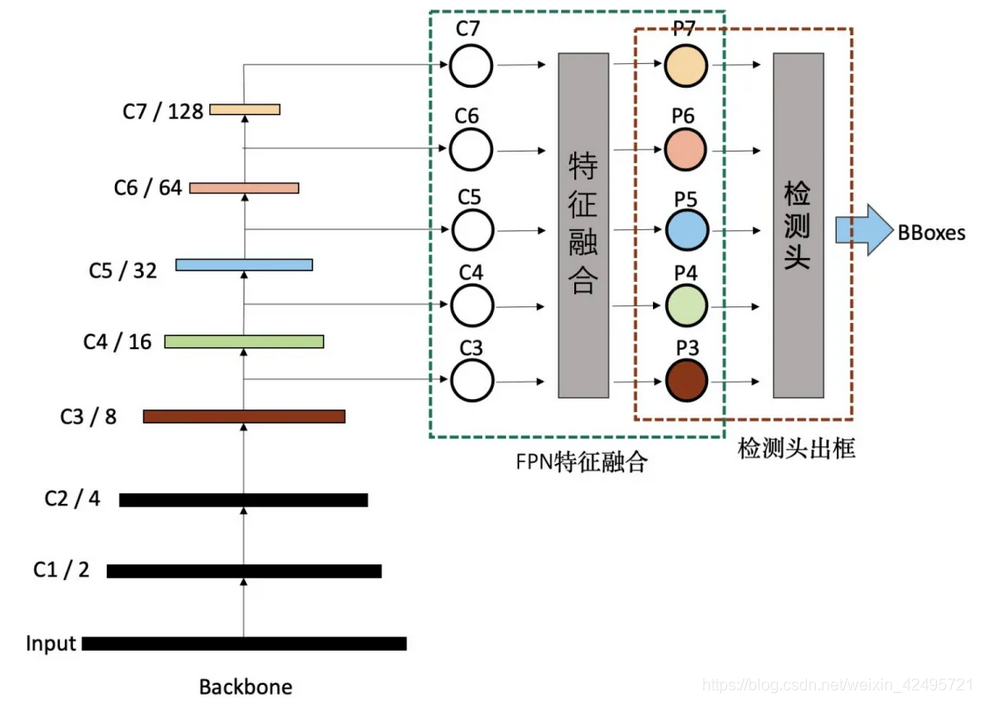
如上图,我们常见的物体检测算法,其实可以分解为三个递进的阶段:
1. Backbone生成特征阶段
计算机视觉任务一般都是基于常用预训练的Backboneÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









