







直接优化策略梯度而不是优化Q函数来指导agent做决策
1 基本概率
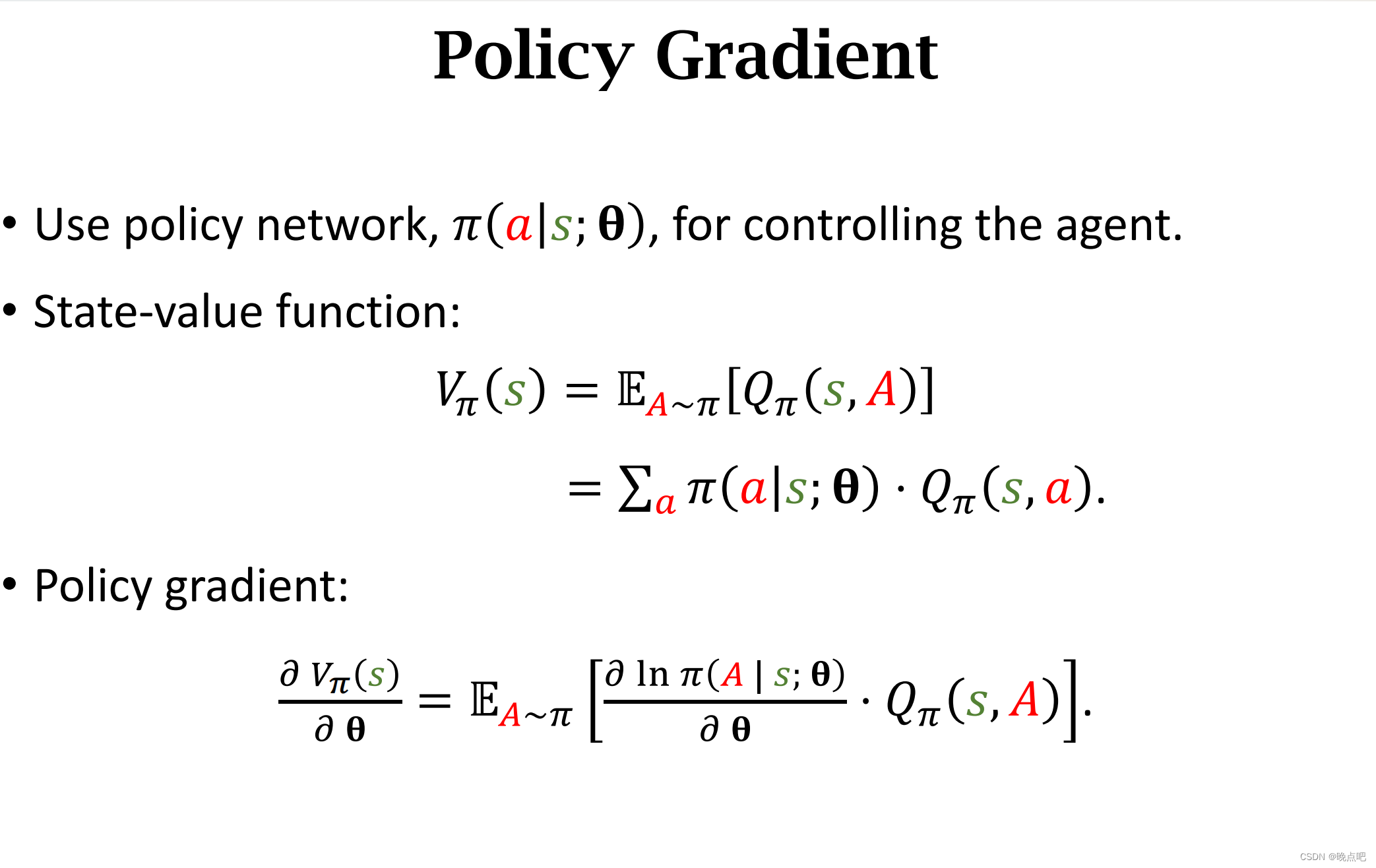
- 策略 policy: π ( a ∣ s ) \pi(a|s) π(a∣s)
- 状态价值函数
V π ( s t ) = E A [ Q π ( s t , A ) ] V_\pi (s_t)=E_A[Q_\pi(s_t,A)] Vπ(st)=EA[Qπ(st,A)]
V π ( s t ) = ∑ a π ( a ∣ s ) ∗ Q π ( s t , A ) V_\pi (s_t)=\sum_a\pi(a|s)*Q_\pi(s_t,A) Vπ(st)=∑aπ(a∣s)∗Qπ(st,A)
2 目标最大化 V π ( s t ) V_\pi (s_t) Vπ(st)
- 策略梯度 policy gradient
∂ V π ( s ) ∂ θ = E A ~ π [ ∂ I n π ( A ∣ s ; θ ) ∂ θ ∗ Q π ( s , A ) ] \frac{\partial V_\pi(s)}{\partial \theta}=E_{A~\pi}[\frac{\partial In\pi(A|s;\theta)}{\partial \theta} * Q_\pi(s,A)] ∂θ∂Vπ(s)=EA~π[∂θ∂Inπ(A∣s;θ)∗Qπ(s,A)]
3 添加baseline
如下添加一个b,和动作A是独立,不随A的变化而变化。
E
A
~
π
[
b
∗
∂
I
n
π
(
A
∣
s
;
θ
)
∂
θ
]
E_{A~\pi}[b * \frac{\partial In\pi(A|s;\theta)}{\partial \theta} ]
EA~π[b∗∂θ∂Inπ(A∣s;θ)]
3.1 baseline的梯度为0证明
由于b独立于A
E
A
~
π
[
b
∗
∂
I
n
π
(
A
∣
s
;
θ
)
∂
θ
]
E_{A~\pi}[b * \frac{\partial In\pi(A|s;\theta)}{\partial \theta} ]
EA~π[b∗∂θ∂Inπ(A∣s;θ)]
=
b
∗
E
A
~
π
[
∂
I
n
π
(
A
∣
s
;
θ
)
∂
θ
]
b* E_{A~\pi}[ \frac{\partial In\pi(A|s;\theta)}{\partial \theta} ]
b∗EA~π[∂θ∂Inπ(A∣s;θ)]
=
b
∗
∑
a
π
(
a
∣
s
;
θ
)
∂
I
n
π
(
a
∣
s
;
θ
)
∂
θ
b *\sum_a\pi(a|s;\theta) \frac{\partial In\pi(a|s;\theta)}{\partial \theta}
b∗∑aπ(a∣s;θ)∂θ∂Inπ(a∣s;θ)
=
b
∗
∑
a
π
(
a
∣
s
;
θ
)
1
π
(
a
∣
s
;
θ
)
∂
π
(
a
∣
s
;
θ
)
∂
θ
b *\sum_a\pi(a|s;\theta) \frac{1}{\pi(a|s;\theta)} \frac{\partial \pi(a|s;\theta)}{\partial \theta}
b∗∑aπ(a∣s;θ)π(a∣s;θ)1∂θ∂π(a∣s;θ)
=
b
∗
∑
a
∂
π
(
a
∣
s
;
θ
)
∂
θ
b *\sum_a\frac{\partial \pi(a|s;\theta)}{\partial \theta}
b∗∑a∂θ∂π(a∣s;θ)
=
b
∗
∂
1
∂
θ
b* \frac{\partial 1}{\partial \theta}
b∗∂θ∂1
=0
即证: E A ~ π [ b ∗ ∂ I n π ( A ∣ s ; θ ) ∂ θ ] = 0 E_{A~\pi}[b * \frac{\partial In\pi(A|s;\theta)}{\partial \theta} ]=0 EA~π[b∗∂θ∂Inπ(A∣s;θ)]=0
4 策略梯度添加baseline
- 策略梯度 policy gradient
∂
V
π
(
s
)
∂
θ
=
E
A
~
π
[
∂
I
n
π
(
A
∣
s
;
θ
)
∂
θ
∗
Q
π
(
s
,
A
)
]
−
E
A
~
π
[
b
∗
∂
I
n
π
(
A
∣
s
;
θ
)
∂
θ
]
\frac{\partial V_\pi(s)}{\partial \theta} =E_{A~\pi}[\frac{\partial In\pi(A|s;\theta)}{\partial \theta} * Q_\pi(s,A)] -E_{A~\pi}[b * \frac{\partial In\pi(A|s;\theta)}{\partial \theta} ]
∂θ∂Vπ(s)=EA~π[∂θ∂Inπ(A∣s;θ)∗Qπ(s,A)]−EA~π[b∗∂θ∂Inπ(A∣s;θ)]
=
E
A
~
π
[
∂
I
n
π
(
A
∣
s
;
θ
)
∂
θ
∗
(
Q
π
(
s
,
A
)
−
b
)
]
E_{A~\pi}[\frac{\partial In\pi(A|s;\theta)}{\partial \theta} * (Q_\pi(s,A)-b)]
EA~π[∂θ∂Inπ(A∣s;θ)∗(Qπ(s,A)−b)]
5 蒙特卡洛计算策略梯度
随机从策略policy
π
(
a
∣
s
)
\pi(a|s)
π(a∣s) 中选择动作a,计算梯度
g
(
a
t
)
=
∂
I
n
π
(
a
t
∣
s
t
;
θ
)
∂
θ
∗
(
Q
π
(
s
t
,
a
t
)
−
b
)
g(a_t)=\frac{\partial In\pi(a_t|s_t;\theta)}{\partial \theta} * (Q_\pi(s_t,a_t)-b)
g(at)=∂θ∂Inπ(at∣st;θ)∗(Qπ(st,at)−b)
6思考 :b不影响梯度的变化,为什么还要选择b?
因为b虽然不影响梯度的变化,由于我们的Q函数一般是近似的,因此使用一个baseline,能够使采样的数据的方差变小,使估计的数据更准确(相当于对数据做了去均值化)。
7 baseline的选择
baseline的选择有很多种方式,根据不同选择方式,有不同的优化算法。
小结














 4064
4064











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









