






为什么用RT-Thread
作为主控芯片的实时系统,提供多线程编程.小车的每个重要的需要实时的功能都单独作为一个线程.如小车的mpu9250姿态解算出姿态角(Roll、Pitch、Yaw )的过程就单独使用了一个线程(mpu9250),小车的PID控制速度的代码也单独使用了一个线程(speed).每个功能线程(mpu9250,speed...等)都会处理完各自的数据得出结果,并且这些结果在必要的时候提供给主线程(master)使用.也正是因为rt-thread的优先级全抢占式调度使得重要的线程能及时处理完.另外rt-thread提供的finsh/msh在调试期间起到了很大的作用,同时也可以通过远程蓝牙串口控制小车的行为.
实物图
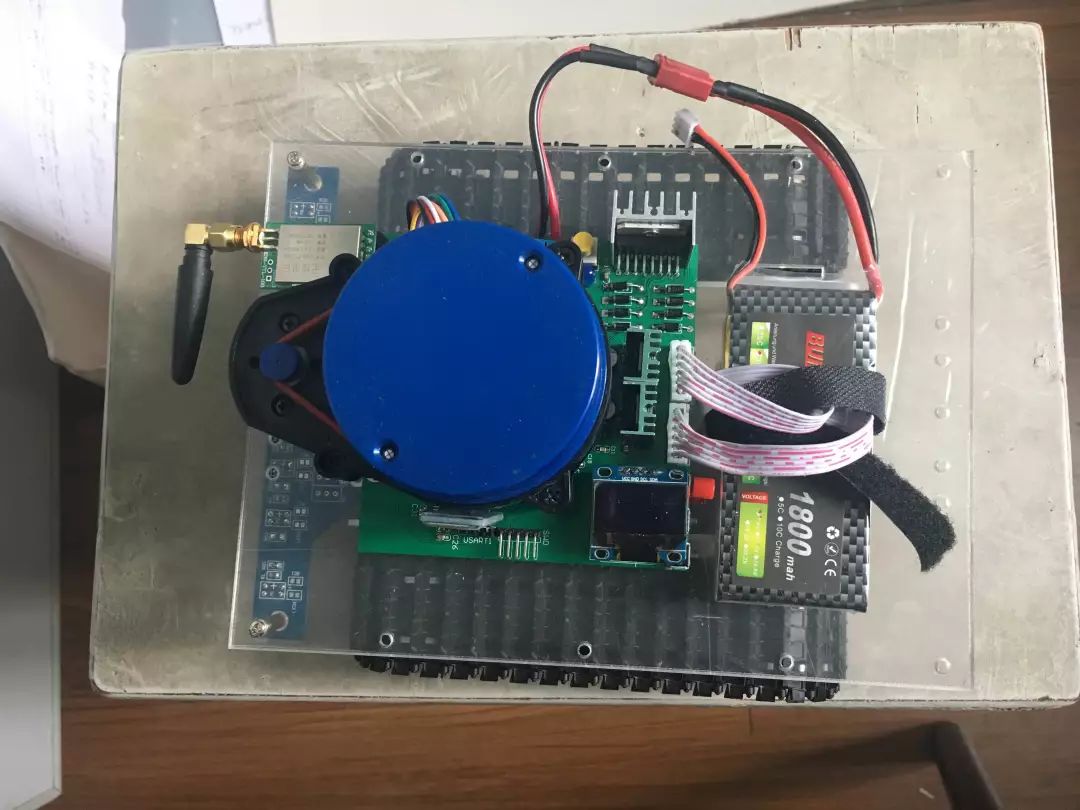

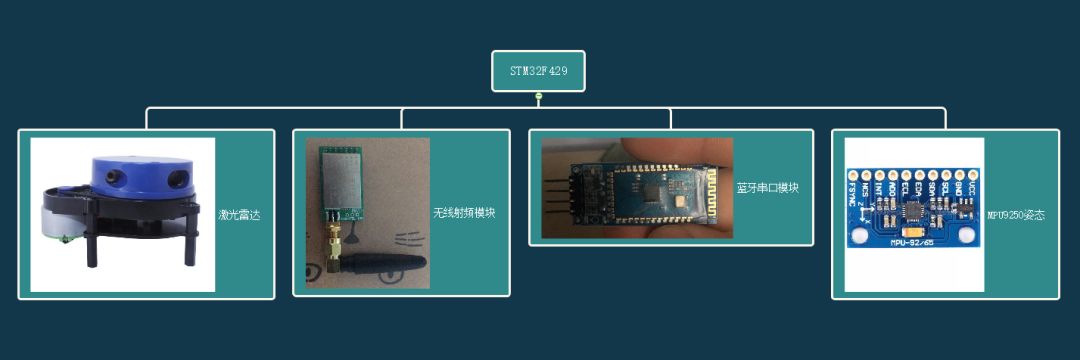
主控芯片:STM32F429IGT6
其它主要配件:激光雷达,蓝牙串口,无线射频模块,MPU9250九轴姿态模块,电机驱动芯片l298n.两个自带AB相编码器的电机.履带一对.
编译环境:MDK525
RT-Thread版本:3.0.2
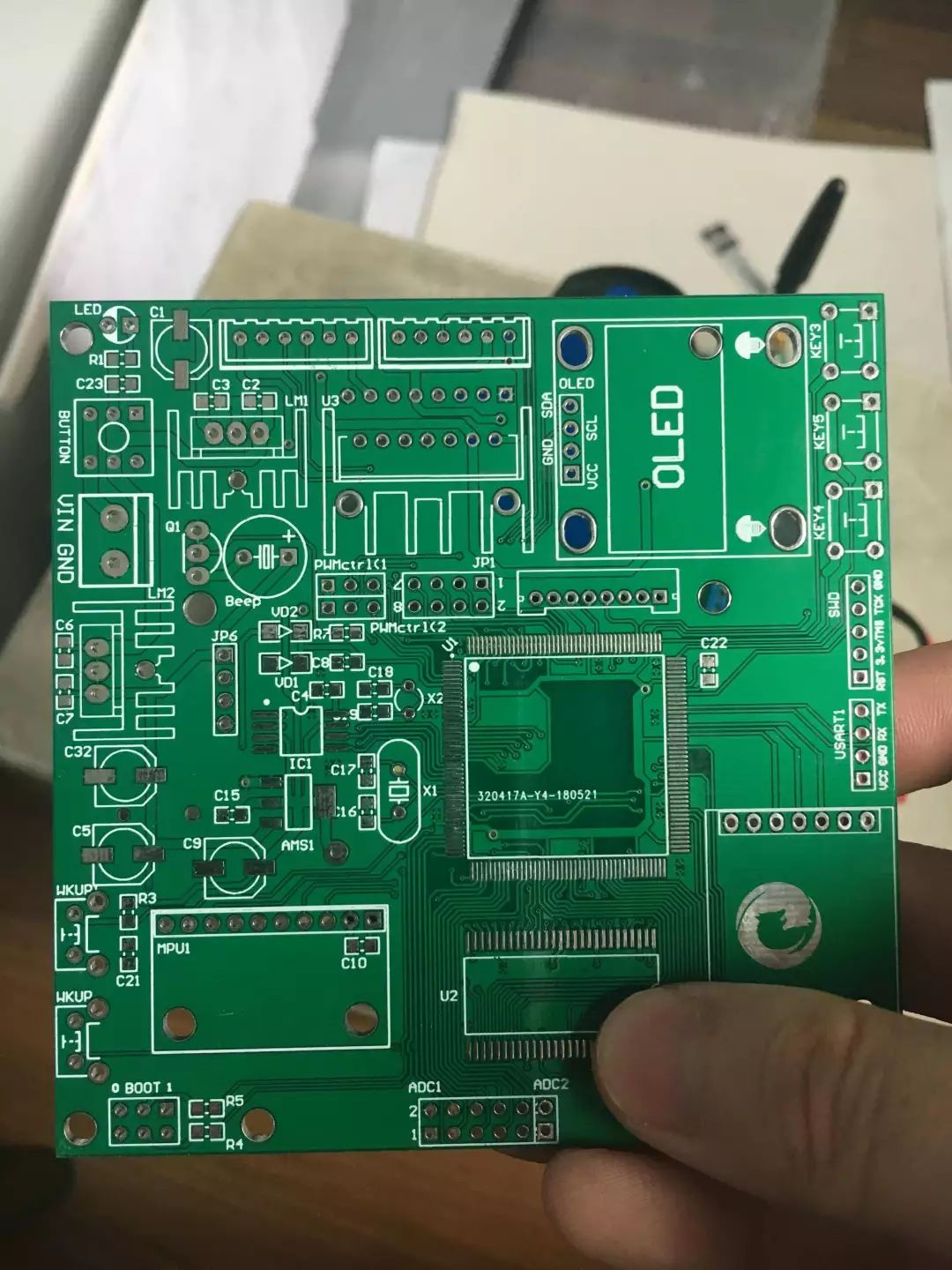
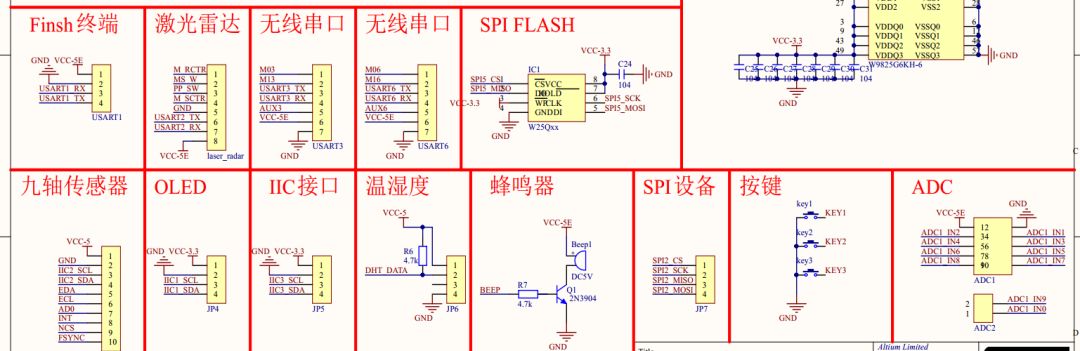
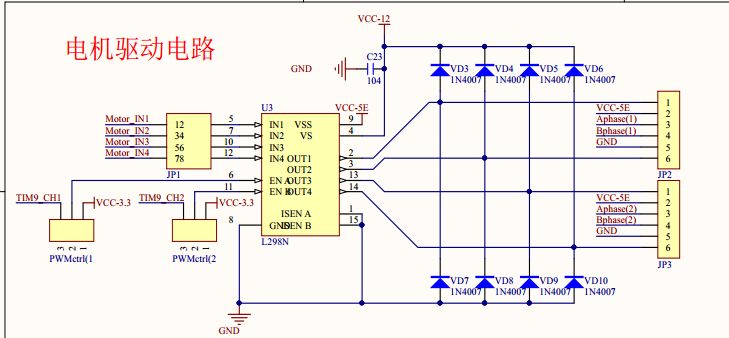
硬件设计
激光雷达通过串口通讯,以及pwm控制转速.
射频模块通过uart6通信.使用rt-thread的事件通知消息的到来.
蓝牙串口,作为msh终端的输出.方便调试.
mpu9250模块通过i2c通信.
软件设计
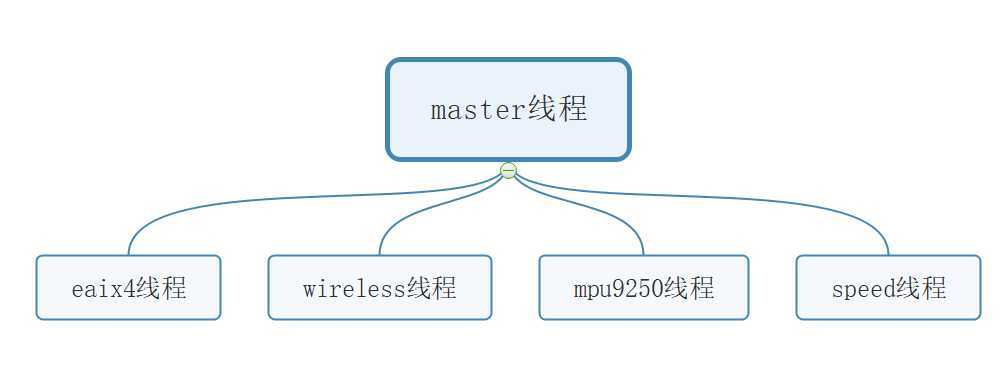
master线程负责创建其它子线程,以及处理各种子线程处理后的信息.
eaix4线程控制激光雷达上传到消息队列里的消息,将激光雷达的版本信息,状态,以及扫描数据解析出来.
mpu9250线程通过dmp姿态解算出 姿态角(Roll、Pitch、Yaw ).
speed线程通过采集stm429自带的编码器以及pwm输出,PID控制电机转速.
几个主要的命令
命令
功能
eaix4cmd -gvf
输出激光雷达版本信息.
eaix4cmd -sc
小车开始扫描,启动避障功能.
eaix4cmd -s
激光雷达停止扫描,但是不会停车.
carMove -f
小车向前.
carMove -b
小车后退.
carMove -l
小车左转.
carMove -r
小车右转.
操作演示GIF
小车效果
源码以及PCB
https://github.com/balanceTWK/LidarCar.git
将下载下来的代码放在rt-thread-3.0.2\bsp\目录下,直接打开project.uvprojx文件即可.或者在我的百度云里下载完整的代码. 百度云地址:https://pan.baidu.com/s/1he8LQZstRXENBMgs_tQ5Mw
轻轻一扫 欢迎关注~
如果觉得好,请
转发
转发
转发















 3103
3103











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









