






 本文介绍了CULane数据集,包括其来源、结构和挑战,重点解读了CLRerNet论文,通过代码示例展示了如何提高车道线检测的置信度。同时,文章记录了创新尝试和实验结果,提供参考链接以供进一步学习和应用。
本文介绍了CULane数据集,包括其来源、结构和挑战,重点解读了CLRerNet论文,通过代码示例展示了如何提高车道线检测的置信度。同时,文章记录了创新尝试和实验结果,提供参考链接以供进一步学习和应用。
学习内容
CULane数据集
论文:CLRerNet: Improving Confidence of Lane Detection With LaneIoU
作者 Hiroto Honda Yusuke Uchida
代码:https://github.com/hirotomusiker/CLRerNet
CULane数据集
下载链接:
链接:https://pan.baidu.com/s/1s34JloVdMYB6JCbEACf_7g 提取码:eoot
论文地址:
链接:https://arxiv.org/abs/1712.06080
基本情况:
CULane数据集是车道线检测的一个比较通用的数据集。由安装在六辆由北京不同驾驶员驾驶的不同车辆上的摄像机收集。
训练集:88880
测试集:9675
验证集:34680
测试集分为正常类别和8个具有挑战性的类别。
数据集目录设置:

训练与验证集:
- driver_23_30frame
- driver_161_90frame
- driver_182_30frame
测试集: - driver_37_30frame
- driver_100_30frame
训练/验证/测试/列表: - list
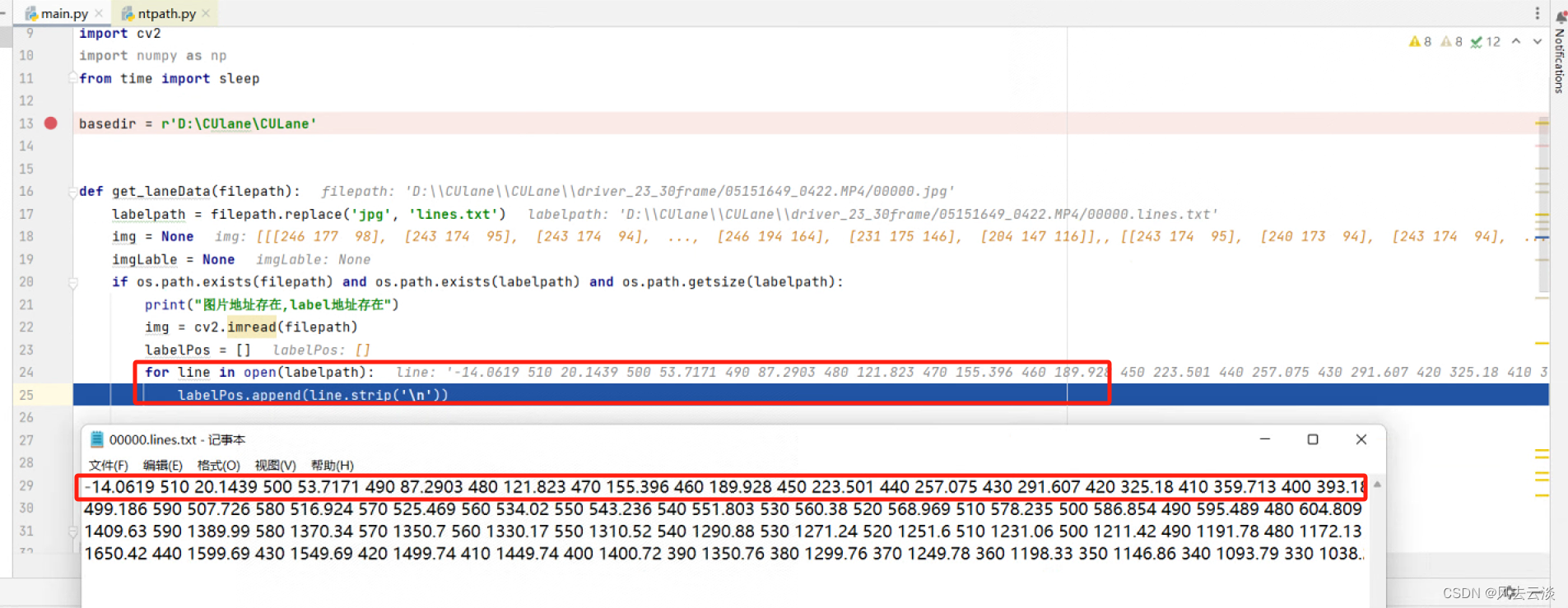
数据集代码测试:
以下图为例:
显示图片为:

对应标注为:

图像对应.txt注释文件。每两个数为一个像素坐标(x,y),纵向标注,每隔十个像素标注,标注图像的下半部分。
数据可视化:引自
下面展示一些 内联代码片。
# -*- coding: utf-8 -*-
"""
Created on Fri Jan 15 17:22:54 2021
@author: yuyanchuan
"""
import os
import cv2
import numpy as np
from time import sleep
basedir=r'D:\BaiduNetdiskDownload\CULane'
def get_laneData(filepath):
labelpath=filepath.replace('jpg','lines.txt')
img=None
imgLable=None
if os.path.exists(filepath) and os.path.exists(labelpath) and os.path.getsize(labelpath):
print("图片地址存在,label地址存在")
img=cv2.imread(filepath)
labelPos=[]
for line in open(labelpath):
labelPos.append(line.strip('\n'))
# imgLable=np.zeros(img.shape)
imgLable=img.copy()
#存储所有到路线的位置信息
print(labelPos)
for lpos in labelPos:
#位置信息通过空格隔开
labelC=lpos.split(' ')[:-1]
ylist=labelC[::2]
xlist=labelC[1::2]
print(len(xlist))
print(len(ylist))
for idx,ivalue in enumerate(xlist):
cv2.circle(imgLable,(int(float(ylist[idx])),int(float(xlist[idx]))),2,(0,0,255),2)
#cv2.circle(img, center, radius, color[, thickness[, lineType[, shift]]])
else:
print("图片地址不存在或者Lable地址不存在")
return img,imgLable
text_path=r'list\train.txt'
#with open(os.path.join(basedir,text_path),'r') as fr:
for line in open(os.path.join(basedir,text_path)):
data=line
print(os.path.abspath(os.path.join(basedir,data[1:].strip('\n'))))
img,imglabel=get_laneData(os.path.join(basedir,data[1:].strip('\n')))
#print(imglabel)
if imglabel is not None:
imglabel=cv2.resize(imglabel,(1024,512))
cv2.imshow('dsd',imglabel)
sleep(1)
if cv2.waitKey(1) & 0xFF == ord('q'): #按q退出
cv2.waitKey(0)
cv2.destroyAllWindows()
一些解读:
按行读取数据,存储到labelPos中。
可视化结果:
图像对应.txt注释文件。每两个数为一个像素坐标(x,y),纵向标注。
论文代码实验
论文:CLRerNet: Improving Confidence of Lane Detection With LaneIoU
作者 Hiroto Honda Yusuke Uchida
代码:https://github.com/hirotomusiker/CLRerNet
论文解读
创新尝试结果记录
本内容将不断进行更新和优化,以分享完整、全面的信息。如果您有任何建议或疑问,欢迎随时联系。

















 2591
2591

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









