







 文章介绍了使用3D激光雷达传感器安装在无人机上的技术,以测量作物高度,这对于高通量植物表型研究至关重要。提出的算法能从点云数据中估计作物高度,且在模拟和真实环境中表现出低误差。此外,还提供了一个用于创建表型农场的工具链和一个公开的数据集。
文章介绍了使用3D激光雷达传感器安装在无人机上的技术,以测量作物高度,这对于高通量植物表型研究至关重要。提出的算法能从点云数据中估计作物高度,且在模拟和真实环境中表现出低误差。此外,还提供了一个用于创建表型农场的工具链和一个公开的数据集。
文章目录
2020
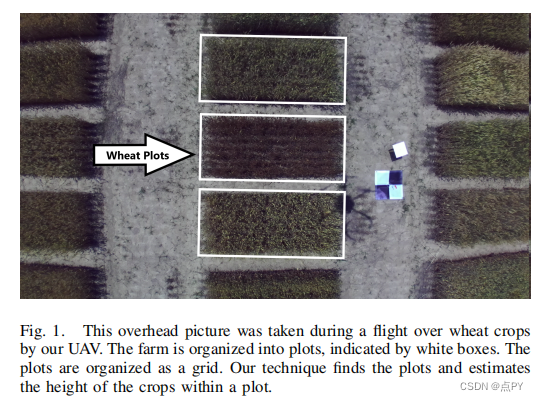
Crop Height and Plot Estimation for Phenotyping from Unmanned Aerial Vehicles using 3D LiDAR
code: https://github.com/hsd1121/PointCloudProcessing
摘要:我们提出了使用安装在无人机(UAV)上的3D光探测和测距(激光雷达)传感器来测量作物高度的技术。了解植物的高度对于监测其整体健康和生长周期至关重要,特别是对于高通量植物表型。我们提出了一种从三维激光雷达点云中提取植物高的方法,特别关注基于绘图的表型环境。我们还提出了一个工具链,可用于创建表型农场,用于露台模拟。该工具创建了一个随机的3D工厂和地形模型。我们在控制和自然环境下进行了一系列的模拟和硬件实验。我们的算法能够估计112个地块的株高,均方根误差(RMSE)为6.1 cm。这是第一个来自麦田上空的机载机器人的三维激光雷达数据集。所开发的模拟工具链、算法实现和数据集可以在我们的GitHub存储库中找到。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











