







 超级会员免费看
超级会员免费看
概要
地理矢量数据通常是指包括点(如地标、位置坐标)、线(如街道、河流)和多边形(如行政区划、建筑物轮廓)这样的基本几何构造,这些都是构成空间数据的基本要素。在路径规划中,这些矢量数据可以被用来表示网络中的节点和边,以及它们之间的关系。路径规划通常需要解决的问题是找到两点之间的最短路径或最优路径。
绘制osm
参考这篇博客。

安装和编译
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
git clone https://github.com/MichalDobis/osm_planner.git
cd ..
catkin_make
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bahsrc
更改配置
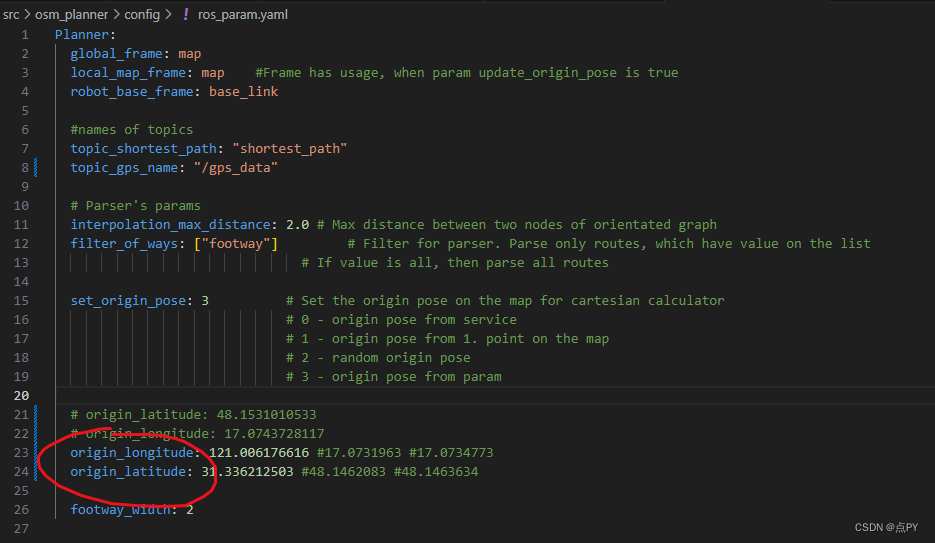
在ros_param.yaml里面更改初始位置和GPS话题
在move_base.launch中更改osm路径

节点运行
roslaunch osm_planner move_base.launch
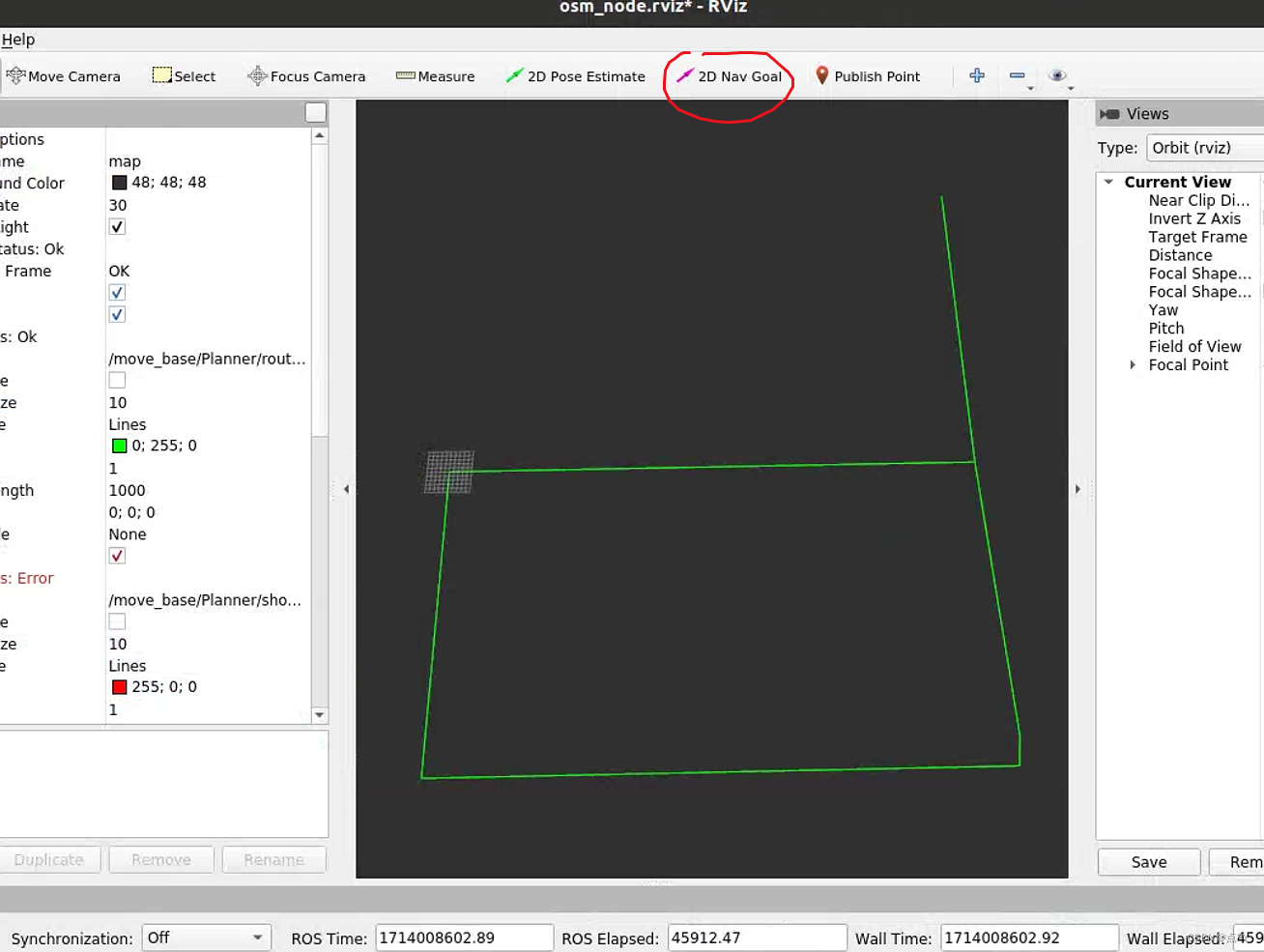
可视化路径
rosservice call /move_base/Planner/draw_route
自定义导航终点



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











