






在工业场景中,因为工艺技术现在发展都比较好,所以很难收集到大量的缺陷数据用于深度学习的学习和训练,针对这种情况,我们可以利用数据增强来帮助深度学习算法更好学习小样本中的特征
什么是数据增强呢?就是让有限的数据产生更多的等价数据
例如这是一台电脑
如果不使用数据增强的话这个电脑就只是一个电脑,每次训练的电脑都是这样的样子的,但是我们实际生活中电脑是多样的。
因此我们可以通过改变亮度,图像扭曲等方式使得图像变得更加多种多样,如下图所示,尽管亮度,形态发生了细微改变,但本质上,这些东西都依然是电脑。
对应显示生活就是白天的电脑是电脑,夜晚的电脑也是电脑,正着放的电脑是电脑,斜着放的电脑也是电脑
改变后的图片放入神经网络进行训练可以为算法提供更多的信息,提高网络的鲁棒性,降低各方面额外因素对识别的影响。
但是要注意数据增强可以模拟识别目标在不同场景下的图像,一些实际的细节特征是模拟不出来的,
例如当零件旋转时,可能会出现不同的阴影,当旋转是基于数据增强产生时,这些阴影不会被算法学习到。
什么是数据增强参数的激活概率?
用户模拟某个参数在现实世界的数据分布,例如拿一台相机在24小时里面记录一颗在户外生长的树进行采图,所获得的图片有50%的概率是较亮的(发生在白天),有50%的概率是较暗的(发生在黑夜),那么用一张白天的树的图片进行训练,就可以设置亮度参数在一个较暗的亮度范围内,然后激活概率设置50%
再例如拿一台相机在24小时里面记录村边一只年纪大的狗狗,发现一整天大部分时间都在晒太阳睡觉,就要去吃饭的时候会跑起来,那么所获得的图片有90%是静止睡觉的,10%是运动的,假设狗狗运动的图片因为某些原因丢失了,那么我们及可以设置运动模糊参数,然后激活概率设置为10%
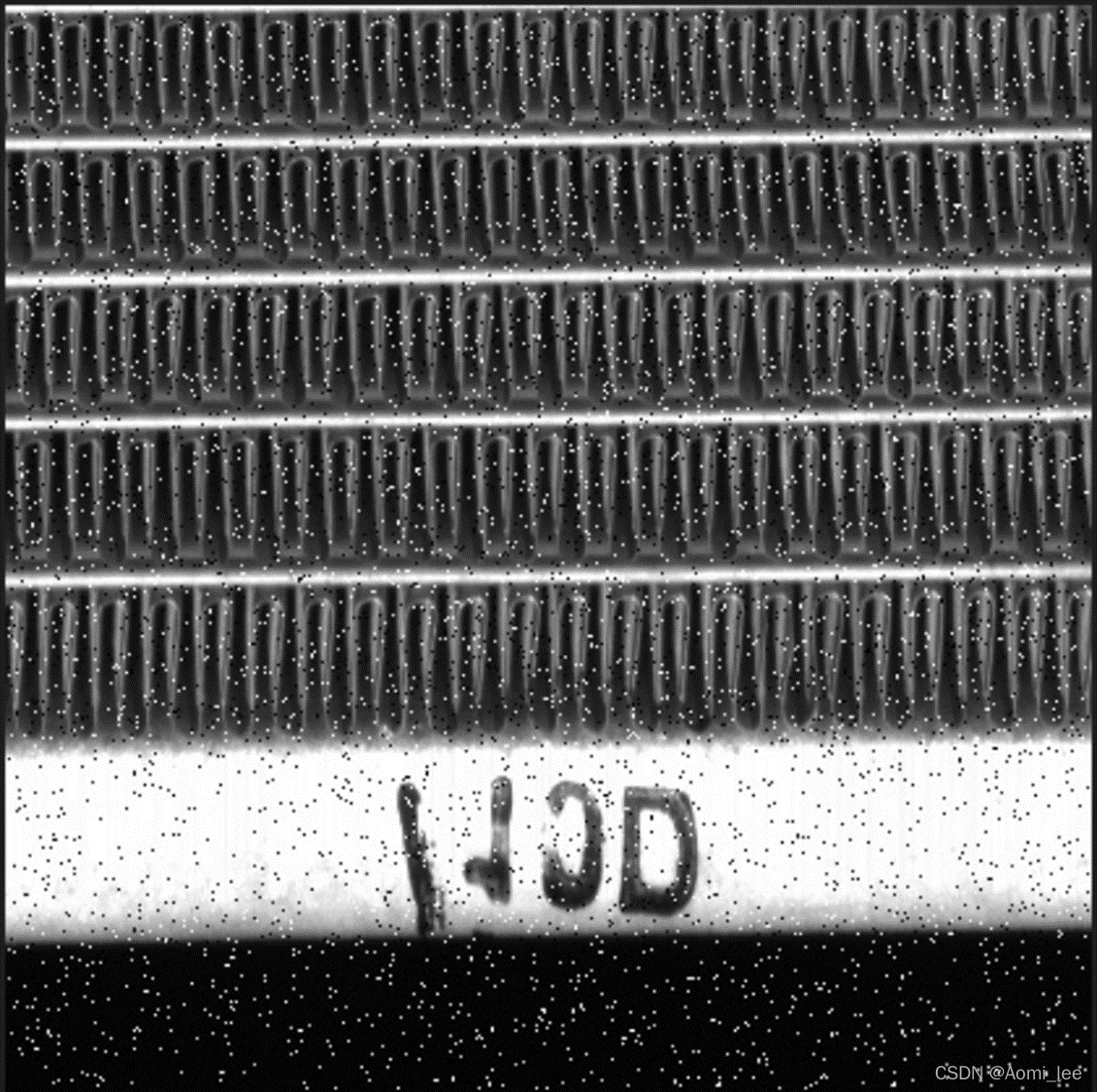
什么是噪声?
噪声在图像上常表现为一引起较强视觉效果的孤立像素点或像素块。一般,噪声信号与要研究的对象不相关,它以无用的信息形式出现,扰乱图像的可观测信息。通俗的说就是噪声让图像不清楚。
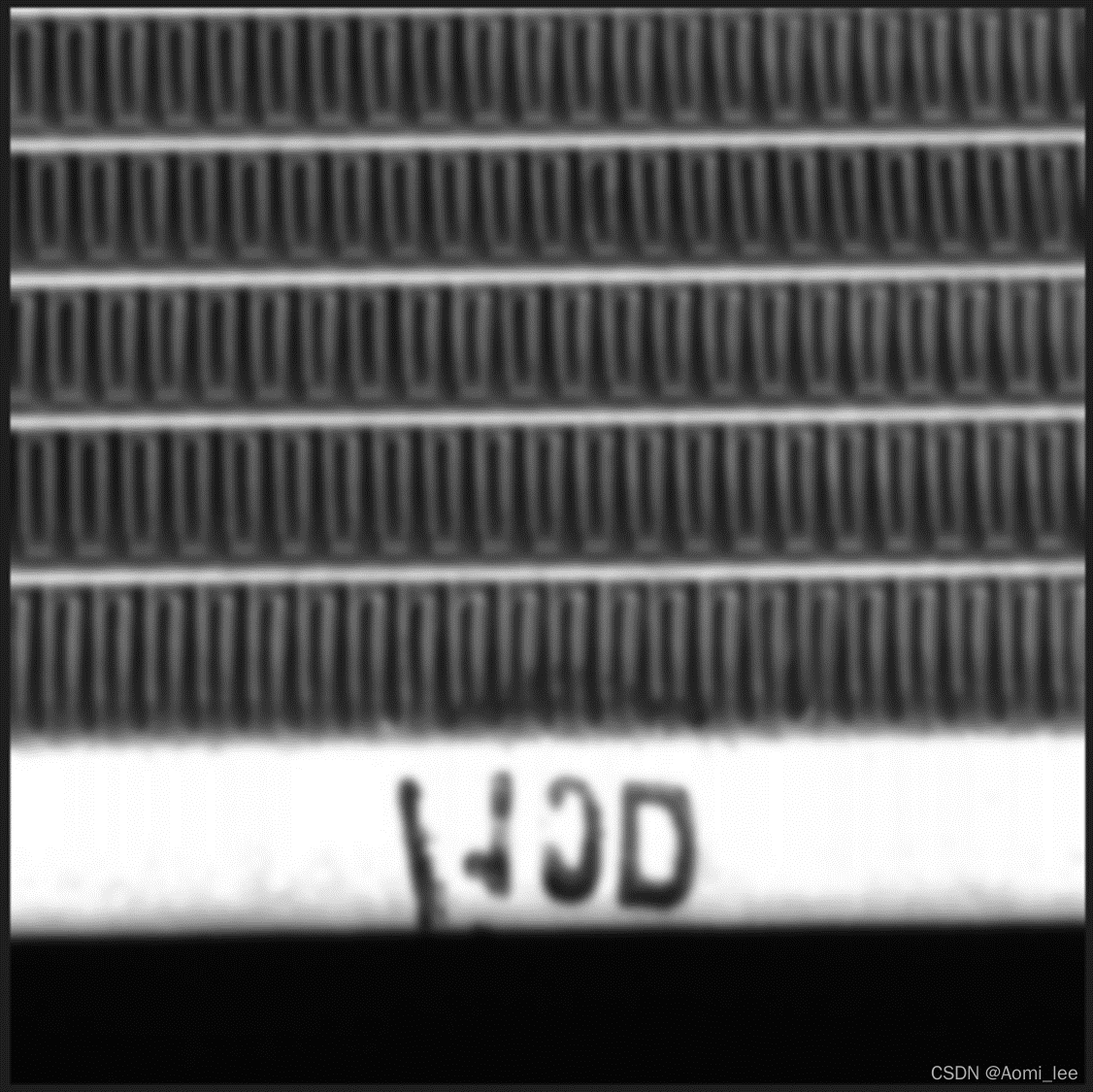
原图

高斯噪声
运动模糊

椒盐噪声















 125
125











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









