







基于AFM的物质表面微观结构及力学性质表征仿真实验
说明: 本次实验为本科生《基础物理实验》课程中的虚拟实验部分,在虚拟实验平台中进行。
一、实验目的:
1. 掌握AFM的基本成像原理及系统结构;
2. 掌握AFM的基本操作技巧及操作步骤;
3. 掌握AFM在样品纳米形貌获取及性质区分中的应用;
4. 掌握AFM在定量分析中的应用,加深对原子间相互作用力的理解,了解探针-样品接触力模型。
二、实验原理:
1. AFM成像原理
AFM利用微悬臂探针来感应样品表面形貌信息。微悬臂探针是一端带有尖端曲率半径非常小的针尖的微悬臂,其不带针尖的一端固定,带针尖的一端接近样品表面并与其发生相互作用。样品表面形貌的变化导致探针-样品间距离的变化,从而引起探针-样品相互作用力的变化。受力的变化将导致微悬臂运动状态的改变,如微悬梁的形变量、共振频率、振幅等的变化。通过调整探针高度保持微悬臂运动状态的恒定,探针的高度对应着样品表面对应点的高度。探针在样品表面局部区域进行二维光栅式逐点扫描,记录各点的探针高度信息,进而获取样品该区域的形貌信息。
AFM主要有三种工作模式,接触模式(Contact Mode),非接触模式(Non-contact Mode) 和轻敲模式(Tapping Mode)。接触模式中,探针与样品表面始终保持接触,探针-样品相互作用力导致微悬臂弯曲,通过检测悬臂的弯曲量可获取样品的表面形貌。非接触模式又称为频率调制模式(Frequency Modulation),该模式下微悬臂振动在实时共振频率处,针尖在样品表面上方斥力区,始终不与样品表面接触,通过记录微悬臂共振频率的变化实现对样品形貌的跟踪;轻敲模式又称为幅度调制模式(Amplitude modulation),该模式下微悬臂在共振频率附近振动,针尖轻轻的敲击表面,间断地和样品接触,通过记录微悬臂振幅的变化获取样品表面形貌。轻敲模式AFM有效地减小了探针-样品间相互作用力,避免了横向摩擦力,因而成为如今使用最广泛的AFM工作模式。
幅度调制AFM系统结构主要由以下四部分构成:力传感器(探针及其激励、形变检测)、反馈信号检测电路(信号放大及解调)、反馈控制器以及三维扫描器。微悬臂探针在外加信号激励下振动在共振频率处,当探针远离样品时,微悬臂自由振荡;当针尖接近样品时,探针-样品之间的相互作用力使得微悬臂的振幅减小;调整探针高度保持微悬臂振幅恒定,记录探针高度实现对样品表面形貌信息的表征。
2. 相位图像
幅度调制成像模式下,探针-样品相互作用力引起微悬臂运动状态的改变。其中,不同样品引起的微悬臂振动信号相位信息的变化是不同的,记录探针运动信号相对于驱动信号的相位差,可以获得样品的相位图像,从而揭示样品表面的性质信息。相位图像能够反映纳米尺度分辨率的非均质材料表面的成分,这是形貌像无法反映的。
相位的改变与探针-样品间非保守的相互作用力有关。非保守力导致能量损耗,需要探针在每个周期内补偿损失的能量来保证微悬臂振荡过程的稳定。该过程可用谐振子模型描述。相位延迟的正弦值与设定值及探针-样品表面非保守相互作用引起的能量耗散有关。幅度调制AFM在工作过程中保持振幅恒定,因此式(6)中前一个乘数保持不变,因而相位变化反映了探针-悬梁系统机械能转移到样品表面。
3. 力-距离曲线
力-距离曲线是描述探针-样品之间的相互作用力与二者距离关系的曲线。通过对力-距离曲线进行分析,可以得到样品的杨氏模量等力学参数。
探针-样品相互作用力可用球-平面的几何模型来描述,对于样品表面黏附力较小的硬接触,相互作用力通常采用DMT模型进行描述。z为探针实时位移,zc为探针平衡位置与样品之间的距离(即探针平衡位置与样品表面的距离)。H为Hamaker常数,R为针尖尖端半径,a0为分子间距,Eeff为系统等效杨氏模量,vt为针尖的泊松常数,vs为样品的泊松常数,Et为探针针尖的杨氏模量,Es为样品的杨氏模量。若其他参数已知,由式(7)便可计算得到样品的杨氏模量。
(7) 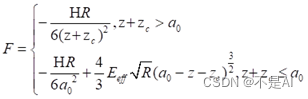
力-距离曲线中线性区域的斜率与系统的弹性模量有关:当样品表面相比悬梁非常柔软时,力-距离曲线的斜率反映了悬梁的弹性常数;相反,若悬梁与样品相比十分柔软时,则力-距离曲线的斜率可以反映样品的弹性性能。
三、实验仪器:
本次实验中使用的仪器有:AFM探头、控制器、直流稳压电源、示波器、信号发生器、幅度解调模块、AFM控制器软件操作模块、探针及样品。
(1)AFM探头
该模块由三维扫描器、步进电机、探针及相应的电子学设备组成,与信号发生器、幅度解调模块、示波器及控制器相连。探头机箱中共有4个外接接口:扫描器接口与控制器DA输出接口相连,用于提供三维扫描器扫描信号;激励信号接口与信号发生器输出接口相连,用于激励石英音叉探针共振;两个输出接口一个与幅度解调模块的输入接口相连,获取探针实时振动幅度值,将其用于探针位置控制。另一个接口与示波器相连接,用于观察探针振动信号。
鼠标左键点击探头机箱盖可打开探头机箱,选择合适的探针及样品放置探头中用于成像;F3键可用于探头机箱外壳透视效果的切换,便于观察探头的整体结构;用鼠标左键点击探头各个接口,可实现探头接口与其他模块的互相连接。
(2)控制器
控制器机箱包含采样激励接口、D/A输出接口、直流稳压电源接口及上位机接口,在各接口处点击鼠标左键可实现控制器与相应功能模块的互联,控制器核心为PC-104主板,采用12位多通道AD/DA,μC/OS操作系统用于AFM的实时调节控制。该模块用于三维扫描器控制、探针振幅信号的采集并进行PID计算、与上位机双向通信。
(3)直流稳压电源
直流稳压电源包含8个电源输出口:±160V,接地,±18V,接地,+5V,接地及一个电源开关。其中±160V用于给三维扫描器供电,实现三维扫描;±18V用于步进电机驱动芯片及探头前置放大器供电;+5V用于控制器机箱PC-104主板供电。鼠标左键点击开关,直流电源开始向外供电。
(4)示波器
示波器用于观察探针实时振动信号,包含开关、信号输入端口、波形调节旋钮及scale旋钮。鼠标左键点击开关,可实现示波器的开启、关闭;鼠标左键点击示波器输入,可实现探头与示波器对应接口的互连;将鼠标放在波形调节旋钮中,点击左右键可实现波形的放大、缩小;将鼠标放在波形调节旋钮中,点击左右键可改变显示波形数。
(5)信号发生器
信号发生器用于激励探针振动,包含开关、输出接口、扫描选择旋钮、输出按钮以及波形调节旋钮。鼠标左键点击电源开关,可实现信号发生器的开关;信号发生器输出信号的调节通过旋钮调节;鼠标左键点击信号发生器中的扫描选择旋钮,可实现自动扫频与手动扫描的切换,其中自动扫频通过上位机实现,手动扫频通过手动调节旋钮实现;鼠标左键点击output按钮,该键变绿表示信号发生器有信号输出。通过鼠标左键可实现信号发生器输出接口与探头的连接。
(6)幅度解调模块
幅度解调模块用于从探针的正弦振动信号中获取探针实时振动幅度值,包含电源开关、输入及输出端口。鼠标左键点击Power按钮,可实现该模块的开关操作;输入端口与探头输出相连,输出与控制器相连接。
(7)AFM控制器软件操作模块
控制软件包含步进电机控制、三维扫描器控制、自动扫频、PID控制器参数设置、相位成像、力曲线测量、图像重建及实验数据的文件存取等功能,AFM实验操作的绝大部分操作通过控制软件实现。
(8)探针及样品
本次虚拟AFM实验采用双臂自由振动的石英音叉探针作为原子力检测传感器;采用的样品有:芯片、CD、标准光栅、PSPB样品以及自定义样品。探针及样品均安置于虚拟柜中,鼠标左键点击相应样品及探针可以实现样品及样品的取放,鼠标右键点击样品及探针可浏览该样品(探针)简介。
四、实验内容(主要步骤及过程描述):
1. 样品微观形貌的表征
1.1. 优化控制参数
根据实验原理搭建幅度调制AFM成像系统,调整PID控制参数获取样品形貌图像:分析PID参数的变化对成像效果的影响,并从中找出最优的控制参数,获得清晰的样品表面形貌图。
1.2. 获取样品表面形貌
对于不同的样品表面进行扫描成像,获得样品的表面形貌图。
2. 样品表面性质的表征
2.1. 相位成像揭示样品性质
① 采用幅度调制模式跟踪如图1所示的样品并获取其形貌图像;
② 在幅度调制模式AFM中,通过检测探针的振动信号与驱动信号的相位差,获得样品表面的相位图像。
③ 比较形貌像与相位像的区别,并对结果进行讨论。
2.2. 设定幅度值对相位成像的影响
改变幅度成像模式下AFM幅度设定值,获得不同的相位图像,分析设定值与相位差之间的关系;
3. 样品表面力学参数的测量
测量样品表面杨氏模量
① 根据样品的相位图像,选择合适的位置;
② 获得探针-样品力曲线;
③ 根据力曲线计算样品的杨氏模量;
④ 分析探针、样品杨氏模量对成像带来的影响。
(未完待续)
















 586
586











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











