







强化学习 | COMA
引言
在多agent的强化学习算法中,前面我们讲了QMIX,其实VDN是QMIX的一个特例,当求导都为1的时候,QMIX就变成了VDN。QTRAN也是一种关于值分解的问题,在实际的问题中QTRAN效果没有QMIX效果好,主要是QTRAN的约束条件太过于松散,导致实际没有理论效果好。但是QTRAN有两个版本,QTRAN_BASE和QTRAN_ALT,第二版本效果比第一要好,在大部分实际问题中和QMIX的效果差不多。上述的算法都是关于值分解的,每个agent的回报都是一样的。如果在一局王者荣耀的游戏中,我方大顺风,我方一名角色去1打5,导致阵亡,然后我方4打5,由于我方处于大优势,我方团灭对方,我方所有的agent都获得正的奖励。开始去1打5的agnet也获得了一个正的奖励,显然他的行为是不能获得正的奖励。就出现了“吃大锅饭”的情况,置信度分配不均。COMA算法就解决了这种问题,利用反事实基线来解决置信度分配的问题。COMA是一种“非中心化”的策略控制系统。
1. Actor-Critic
COMA主要采样了Actor-Critic的主要思想,一种基于策略搜索的方法,中心式评价,边缘式决策。
2. COMA
COMA主要使用反事实基线来解决置信分配问题。在协作智能体的系统中,判断一个智能体执行一个动作的的贡献有多少,智能体选取一个动作成为默认动作(以一种特殊的方式确认默认动作),分别执行较默认动作和当前执行的动作,比较出这两个动作的优劣性。这种方式需要模拟一次默认动作进行评估,显然这种方式增加了问题的复杂性。在COMA中并没有设置默认动作,就不用额外模拟这基线,直接采用当前策略计算智能体的边缘分布来计算这个基线。COMA采用这种方式大大减少了计算量。
基线的计算:
∑ u ′ a π a ( u ′ a ∣ τ a ) Q ( s , ( u − a , u ′ a ) ) \sum_{u'a}\pi^a(u^{'a}|\tau^a)Q(s,(u^{-a},u^{'a})) u′a∑πa(u′a∣τa)Q(s,(u−a,u′a))
COMA网络结构
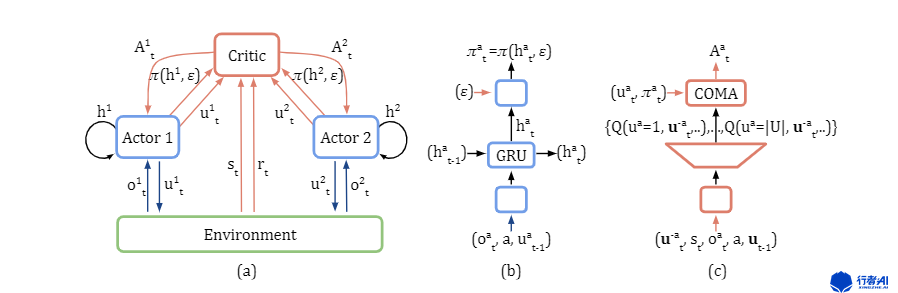
图1. COMA网络结构
图中(a)表示COMA的集中式网络结构,(b)表示actior的网络结构,(c)表示Critic的网络结构。
3. 算法流程
-
初始化actor_network,eval_critic_network,target_critic_network,将eval_critic_network的网络参数复制给target_critic_network。初始化buffer D D D,容量为 M M M,总迭代轮数 T T T,target_critic_network网络参数更新频率 p p p。
-
f o r for for t = 1 t=1 t=1 $to $ T T T $ do$
1)初始化环境
2)获取环境的 S S S,每个agent的观察值 O O O,每个agent的 a v a i l avail avail a c t i o n action action,奖励 R R R。
3) f o r for for s t e p = 1 step=1 step=1 t o to to e p i s o d e episode episode_ l i m i t limit limit
a)每个agent通过actor_network,获取每个动作的概率,随机sample获取动作 a c t i o n action action。actor_network,采用的GRU循环层,每次都要记录上一次的隐藏层。
b)执行 a c t i o n action action,将 S S S, S n e x t S_{next} Snext,每个agent的观察值 O O O,每个agent的 a v a i l avail avail a c t i o n action action,每个agent的 n e x t next next a v a i l avail avail a c t i o n action action,奖励 R R R,选择的动作 u u u,env是否结束 t e r m i n a t e d terminated terminated,存入经验池 D D D。
c) i f if if l e n ( D ) len(D) len(D) > = >= >= M M M
d)随机从 D D D中采样一些数据,但是数据必须是不同的episode中的相同transition。因为在选动作时不仅需要输入当前的inputs,还要给神经网络输入hidden_state,hidden_state和之前的经验相关,因此就不能随机抽取经验进行学习。所以这里一次抽取多个episode,然后一次给神经网络传入每个episode的同一个位置的transition。
e) t d _ e r r o r = G t − Q _ e v a l td\_error =G_t-Q\_eval td_error=Gt−Q_eval计算loss,更新Critic参数。 G t G_t Gt表示从状态 S S S,到结束,获得的总奖励。
f)通过当前策略计算每个agent的每个step的基线,基线计算公式: ∑ u ′ a π a ( u ′ a ∣ τ a ) Q ( s , ( u − a , u ′ a ) ) \sum_{u'a}\pi^a(u^{'a}|\tau^a)Q(s,(u^{-a},u^{'a})) u′a∑πa(u′a∣τa)Q(s,(u−a,u′a))。(边缘分布)
g)计算执行当前动作的优势advantage: A a ( s , u ) A^a(s,u) Aa(s,u)= Q ( s , u ) Q(s,u) Q(s,u)- ∑ u ′ a \sum_{u'a} ∑u′a π a ( u ′ a ∣ τ a ) \pi^a(u^{'a}|\tau^a) πa(u′a∣τa) Q Q Q(s,( u − a u^{-a} u−a, u ′ a ) ) u^{'a})) u′a))。
h) l o s s = ( ( a d v a n t a g e ∗ s e l e c t _ a c t i o n _ p i _ l o g ) ∗ m a s k ) . s u m ( ) / m a s k . s u m ( ) loss=((advantage*select\_action\_pi\_log)*mask).sum()/mask.sum() loss=((advantage∗select_action_pi_log)∗mask).sum()/mask.sum()计算loss,更新actor网络参数。
i) i f if if t t t p = = 0 p==0 p==0 :
j) 将eval_critic_network的网络参数复制给target_critic_network。
4. 结果对比
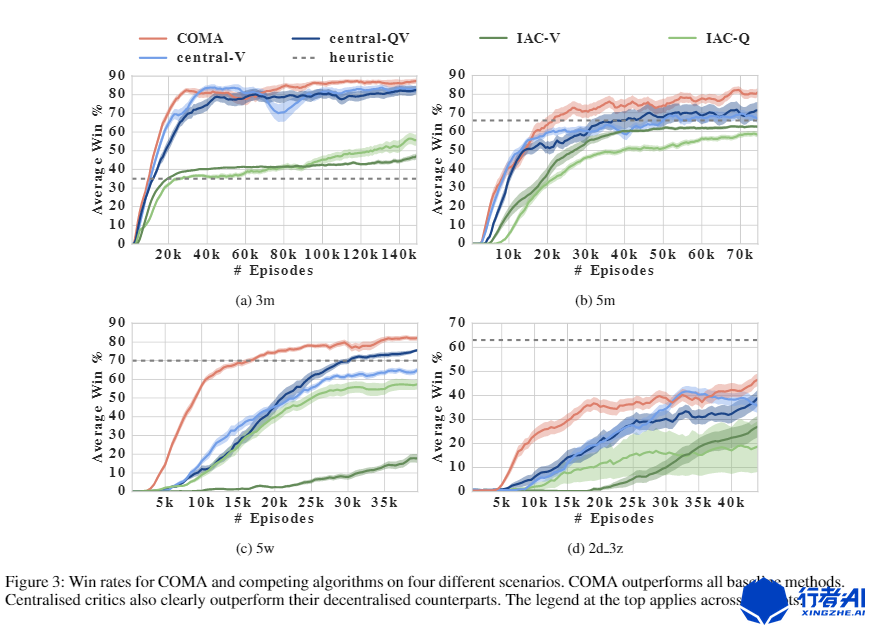
图2. 论文中COMA对比其他网络结果。
我自己跑的数据,关于QMIX,VDN,COMA,三者之间的对比,在相同场景下。
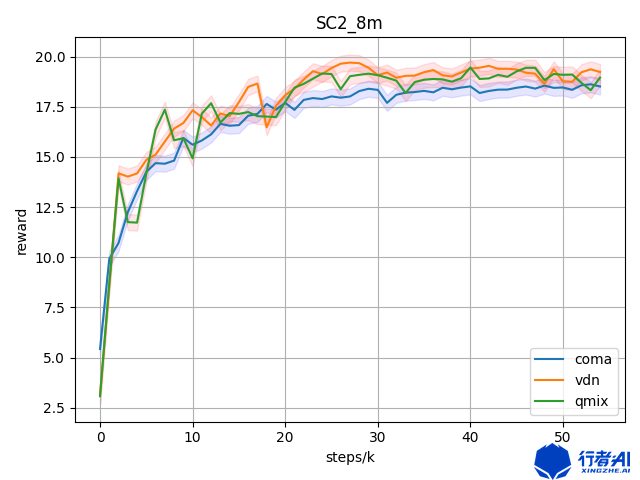
图3. VDN,QMIX,COMA,在sc2中8m地图的表现
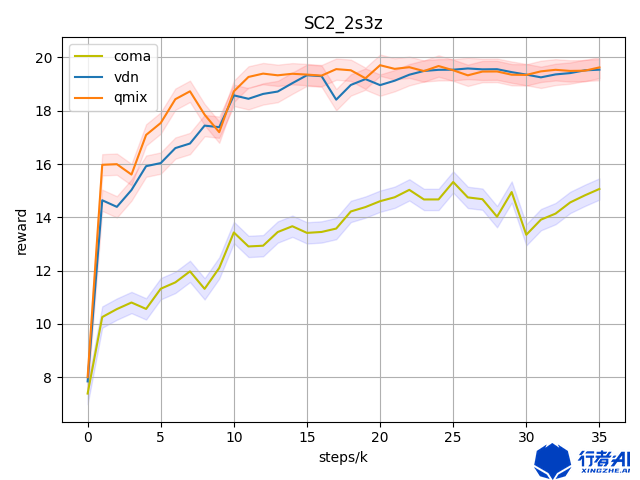
图4. VDN,QMIX,COMA,在sc2中2s3z地图的表现
5. 算法总结
COMA在论文写的算法原理很好,但是在实际的场景中,正如上面的两张图所示,COMA的表现并不是很理想。在一般的场景中,并没有QMIX的表现好。笔者建议读者,在实际的环境中,可以试试VDN,QMIX等等,COMA不适合“带头冲锋”。
6. 资料
1.COMA















 2816
2816











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









