







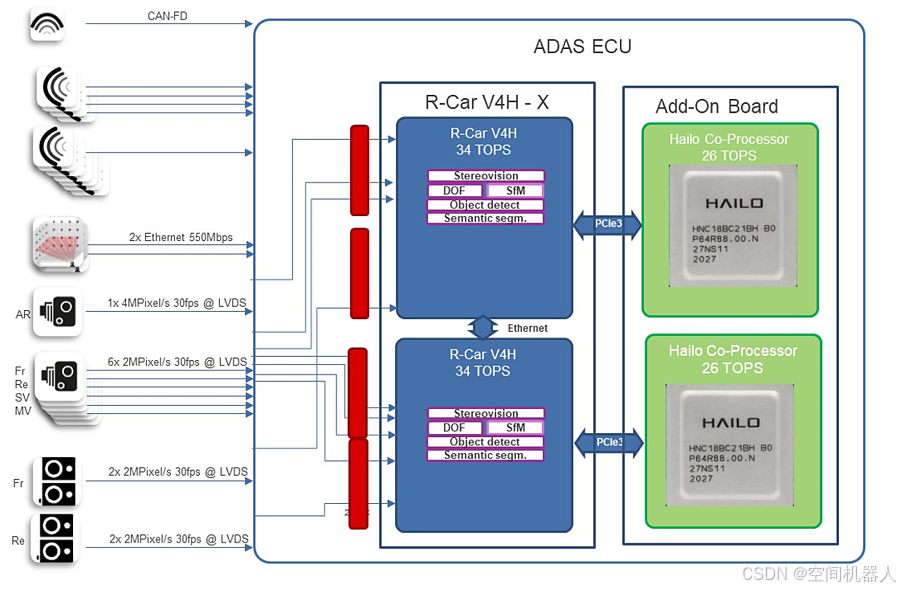
1. 传感器输入模块 📡👀
传感器输入部分包含了多个摄像头📷、雷达📡和激光雷达(LiDAR)🌐,它们通过各种接口(如CAN-FD、Ethernet和LVDS)与计算单元相连,实时采集车辆周围的环境数据。
-
雷达和LiDAR:这些“隐形战士”在低能见度条件下仍能大显身手!雷达📡可以检测到前方的障碍物⛔,而LiDAR则像“3D打印机”一样,构建出高精度的三维环境模型👓。
-
摄像头:捕捉图像、识别车道、标志甚至是行人🚶♂️,摄像头提供高清图像流来帮助车辆了解环境。
举个例子:当你在雾霾天气下驾驶时,雷达和LiDAR就像超能力一样能帮助车辆“看见”前方的行人或障碍物,而摄像头则负责确保红绿灯识别准确,不至于误闯红灯🚦。

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











