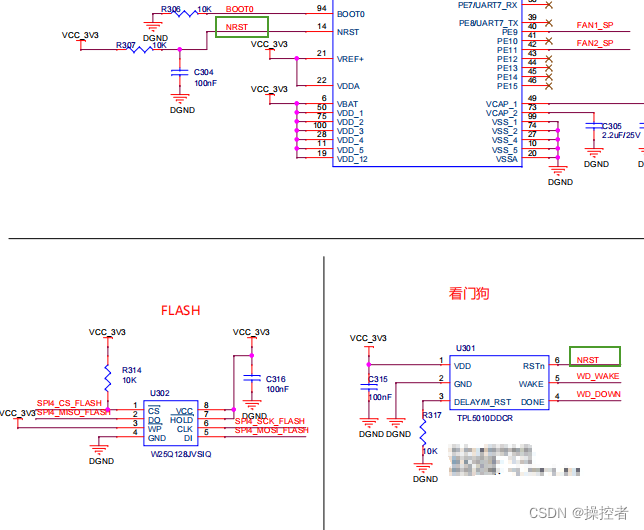
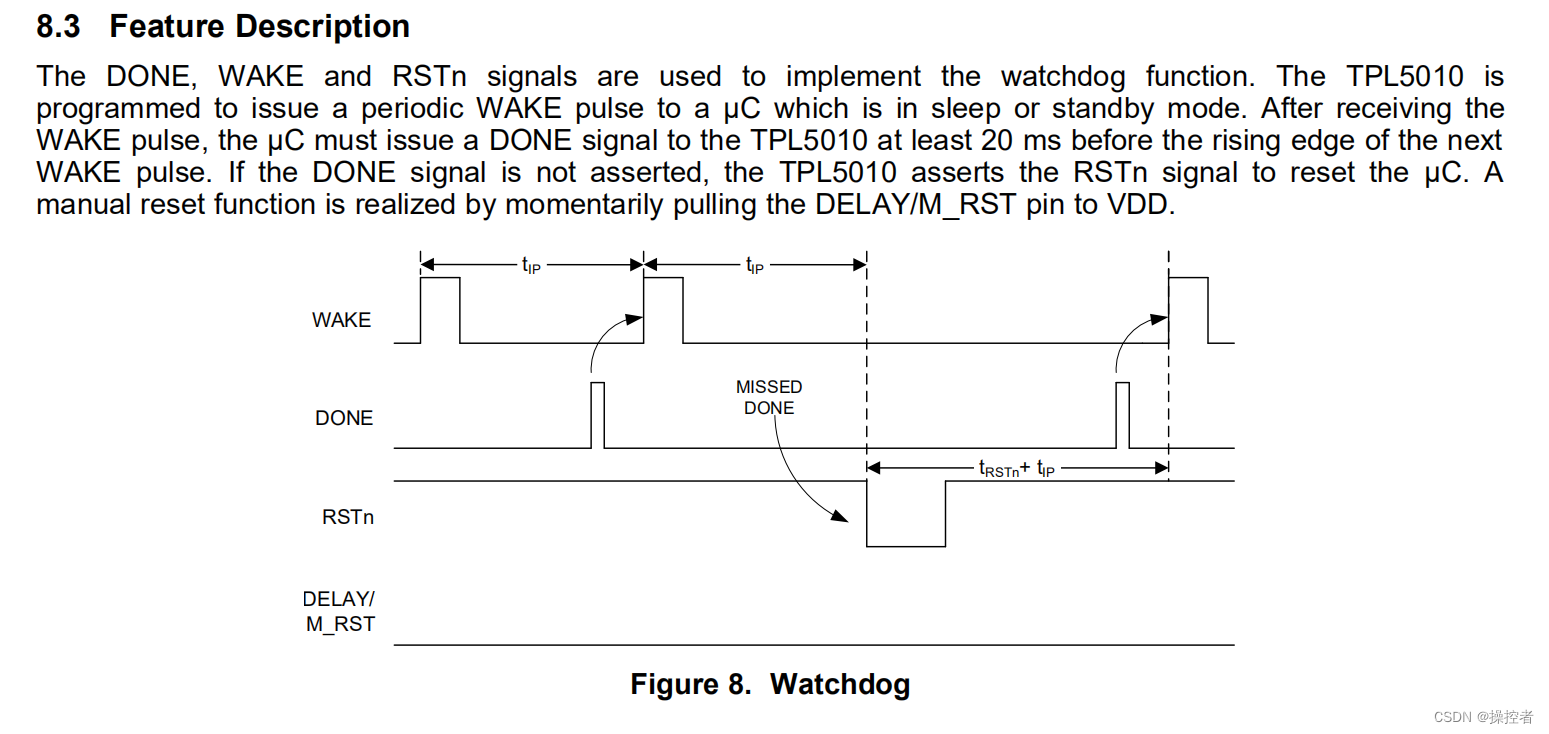
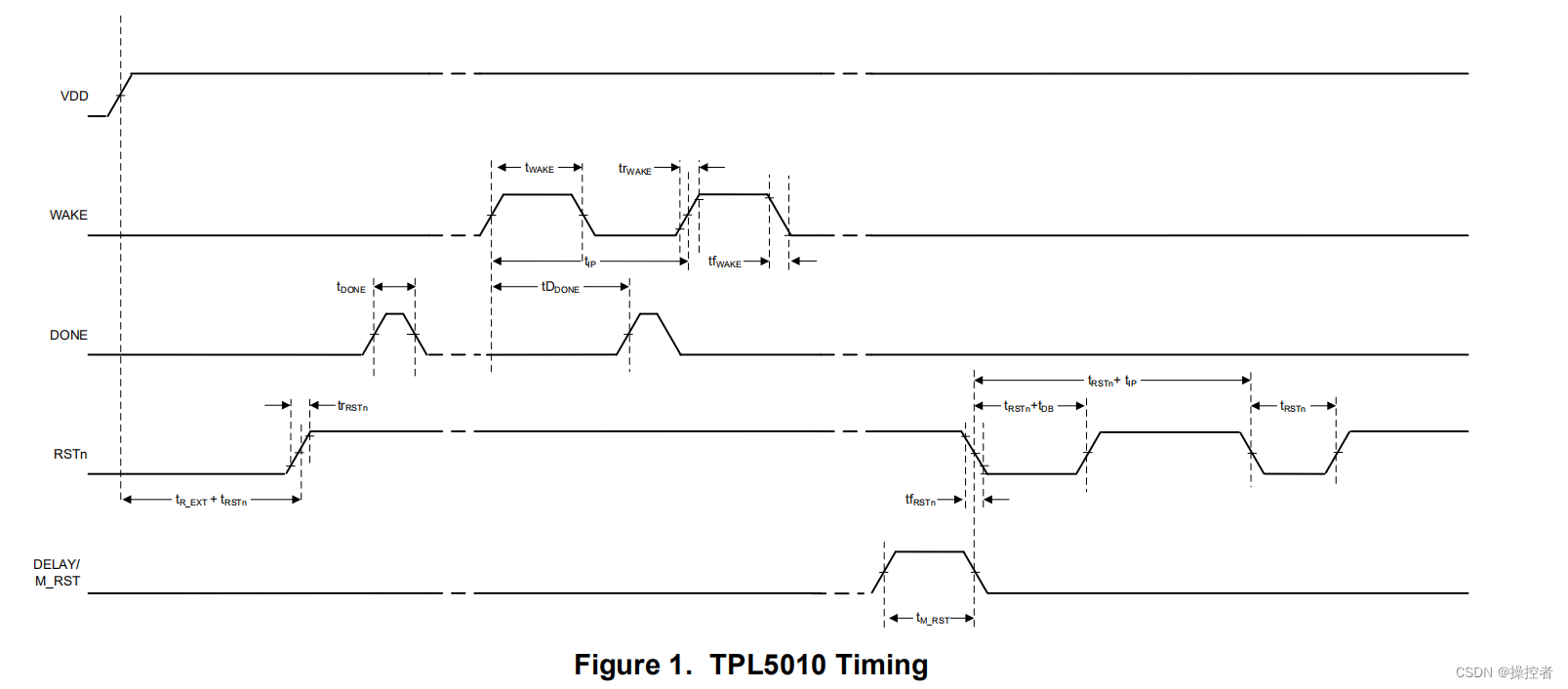
文章目录 概要 原理图 代码 小结 软件看门狗和硬件看门狗区别 TPL5010资料 概要 硬件看门狗实际上就是一个定时器,有一个输入和输出,它的功能是定期检查芯片内部的情况,一旦发生错误就向芯片发出重启信号。使用硬件看门狗,可以预防程序发生死循环。应用看门狗电路后单片机可以在无人状态下连续工作。硬件看门口电路,利用一个定时器来监控主程序的运行。 原理图 1.硬件看门狗原理图 2.TPL5010时序图 代码 ///硬件看门狗初始化。需要将WAKE引脚设置为输入模式,DONE引脚设置输出模式 #define WD_DOWN_Pin GPIO_PIN_11 #define WD_DOWN_GPIO_Port GPIOD








 本文介绍了如何使用TPL5010实现硬件看门狗功能,硬件看门狗作为定时器,用于监测芯片状态并在异常时重启。内容包括原理图解析、代码实现,以及软件和硬件看门狗的区别,并提供了TPL5010的相关资料链接。
本文介绍了如何使用TPL5010实现硬件看门狗功能,硬件看门狗作为定时器,用于监测芯片状态并在异常时重启。内容包括原理图解析、代码实现,以及软件和硬件看门狗的区别,并提供了TPL5010的相关资料链接。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



 9519
493
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
9519
493
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






