







论文原标题为:Global Localization Based on Tether and Visual-Inertial Odometry With Adsorption Constraints for Climbing Robots.
- 摘要:本文提出了一种基于绳系位移传感器、视觉惯性里程计(VIO)和工件计算机辅助设计(CAD)模型的爬壁机器人全局定位方法。系绳位移传感器测量机器人与系绳锚之间的距离,漂移很小,使机器人能够获得全局姿态。利用CAD模型提取机器人运动中的吸附约束,以减小VIO漂移。该方法在没有其他外部定位设备的情况下,实现了机器人爬上大型工件时高精度的全局定位。通过在实际大型工件上的爬行机器人样机测试,验证了该方法的性能。在所有实验中,我们的吸附约束方法优于现有的VIO。在长度为8 m的风力涡轮机叶片上,合并轨迹在全局定位中的最大漂移低至0.51%。
- 视觉惯性SLAM定位的局限性:在爬壁机器人上使用时,相机的视场(FOV)受到机器人吸附表面的限制。对于爬壁机器人上的相机,一次测量只能观察到工件的一小部分,几乎是平面的。再加上机器人不可避免的振动,围绕重力的方位误差会迅速积累,导致主体定位误差甚至失效,因此,传统的视觉惯性里程计(VIO)不能很好地应用于爬壁机器人。
- 主要贡献:提出基于系绳位移传感器、VIO和吸附工件的计算机辅助设计(CAD)模型的爬壁机器人全局定位系统。它可以通过初始化全局位姿和相对里程计获得机器人相对于吸附工件的全局位姿。全局位姿初始化是爬壁机器人定位的一种新颖便捷的方法,可以确定机器人与其吸附工件之间的初始位姿转换关系。相对里程计测量是基于视惯性约束和吸附约束的紧密耦合,可以大规模消除VIO的偏航角漂移,实现鲁棒相对定位。
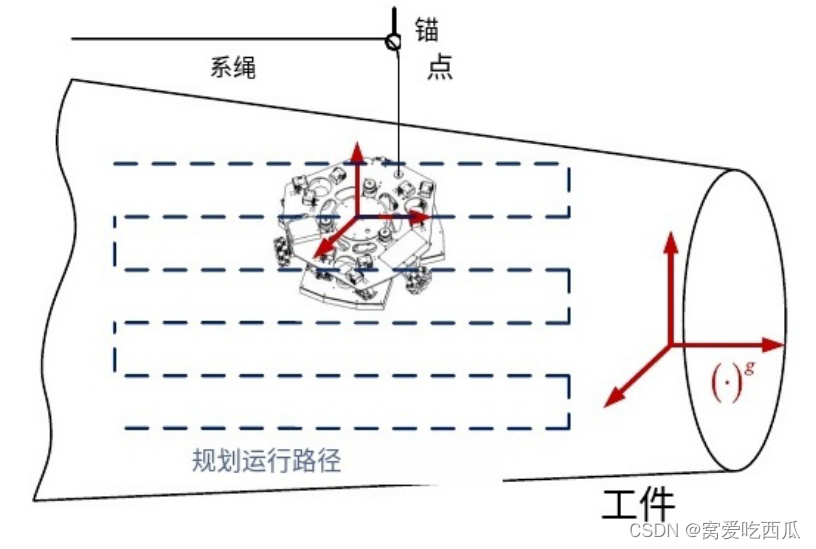
图1 对吸附工件进行操作的爬壁机器人需要全局位姿来定位工作区域,需要鲁棒的相对里程计来跟踪规划操作路径。
4.定位难点:爬壁机器人在大型复杂工件上进行大规模定位的主要难点包括初始全局位姿测量和高
精度的鲁棒相对里程计测量。
5.IMU预积分:基于优化的VIO的常用方法是构造包含视觉约束和惯性约束的状态估计器。视觉约束由图像之间的重投影误差组成。在图像之间进行imu测量积分,统一传感器之间的测量频率,称为预积分。滑动窗口固定问题的尺度,只优化窗口内的状态。将丢弃的信息视为先验信息。通过最小化滑动窗口中约束误差项的和来优化IMU的姿态状态估计和偏置。
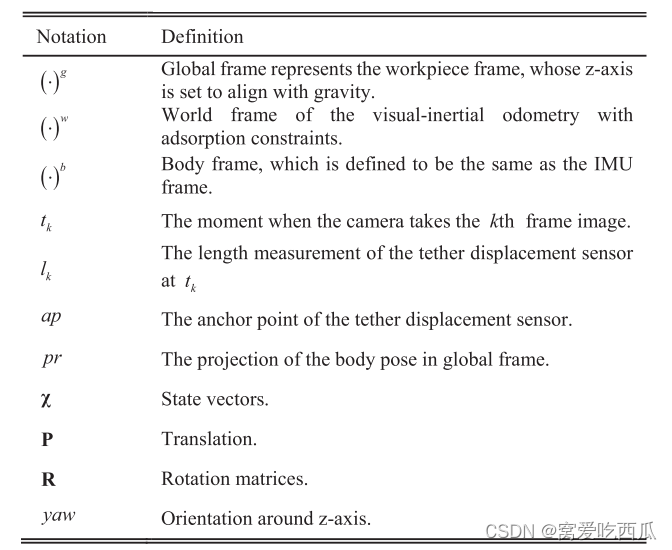
系统术语命名
6.状态向量定义
(1)
(2)
其中Xk是捕获第k张图像时的IMU状态。它包含IMU在世界框架中的位置、速度和方向,以及在机器人本体坐标系中的加速度偏差和陀螺仪偏差。我们将机器人本体坐标系定义为与IMU坐标系相同。
VIO通过视觉惯性BA(bundle adjustment)约束,公式为:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









