






 在尝试编译roslaunchloam_velodyne时遇到进程死亡问题,通过注释LaserMapping.cpp的139-153行代码可解决。另外,修复了从/camera_init到camera_init的帧转换错误,方法是修改指定路径文件中的帧名称。完成修改后,在catkin_ws下执行catkin_make,sourcedevel/setup.bash,然后使用rosbagplay播放数据集进行测试,运行成功。
在尝试编译roslaunchloam_velodyne时遇到进程死亡问题,通过注释LaserMapping.cpp的139-153行代码可解决。另外,修复了从/camera_init到camera_init的帧转换错误,方法是修改指定路径文件中的帧名称。完成修改后,在catkin_ws下执行catkin_make,sourcedevel/setup.bash,然后使用rosbagplay播放数据集进行测试,运行成功。
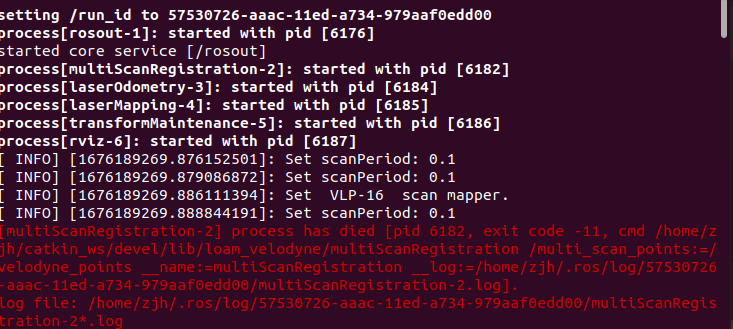
一.编译roslaunch loam_velodyne loam_velodyne.launchc出现以下报错
[multiScanRegistration-2] process has died
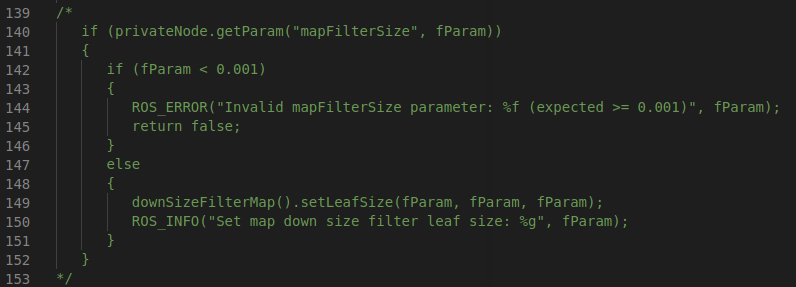
解决办法:将catkin_ws/src/loam_velodyne/src/LaserMapping.cpp 的139-153行注释掉,如下图.
2.Error transforming odometry 'Odometry' from frame '/camera_init' to frame 'camera_init'
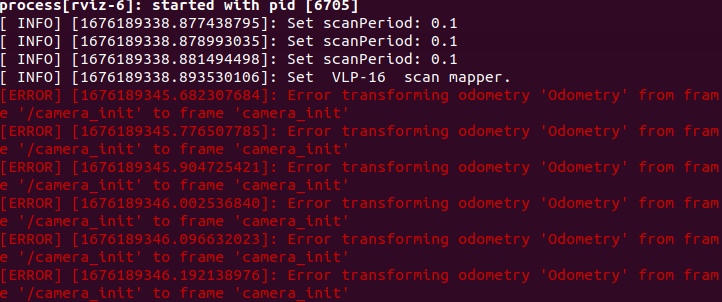
解决办法:将以下路径文件中的"/camera_init" 改为"camera_init".
二.注意:修改完成之后要在catkin_ws目录下编译运行
catkin_make
source ~/devel/setup.bash之后运行你下载的数据集(打开终端位于你下载数据集的位置)
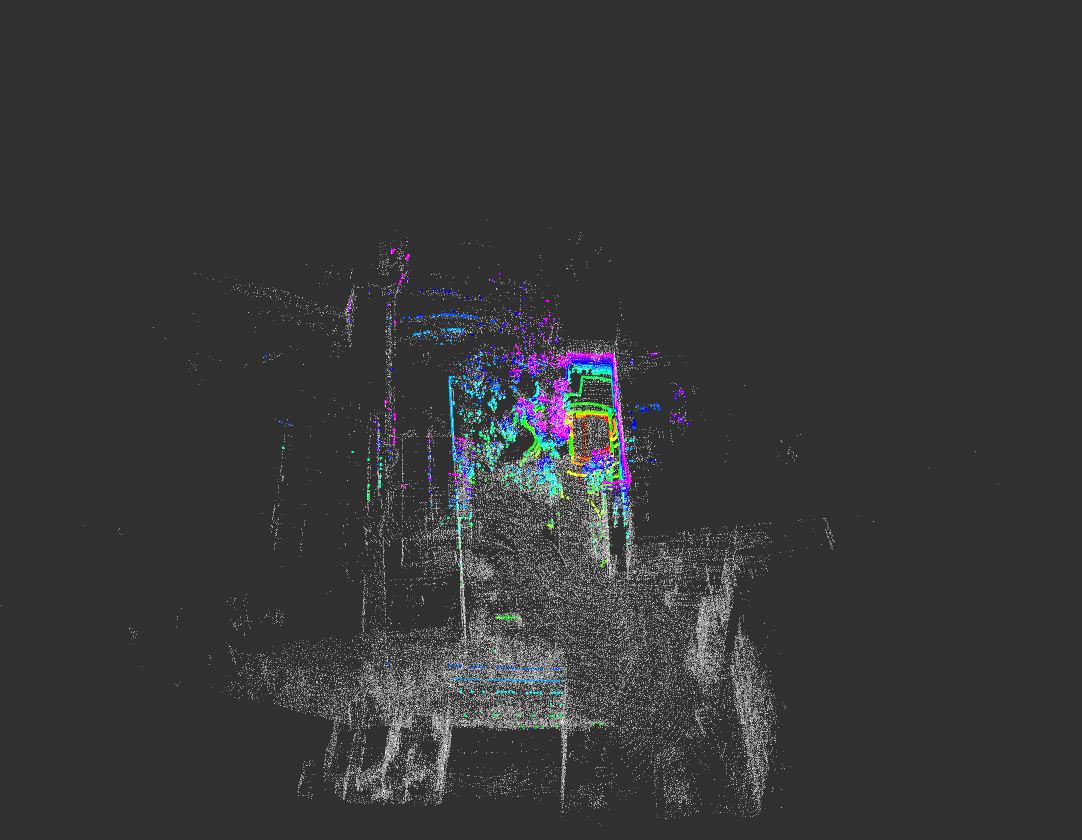
rosbag play nsh_indoor_outdoor.bag 运行成功















 1733
1733











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









