







1、硬件搭建
基于TI公司的J721E平台,TDA4VM核心版来调试摄像头,简述调试过程。所需硬件设备列表如下:
| 序号 | 设备 |
|---|---|
| 1 | J721E平台TDA4VM核心板 |
| 2 | 供电电源 |
| 3 | DP显示端口 |
| 4 | USB串口调试 |
| 5 | 摄像头解串板 |
| 6 | 摄像头 |
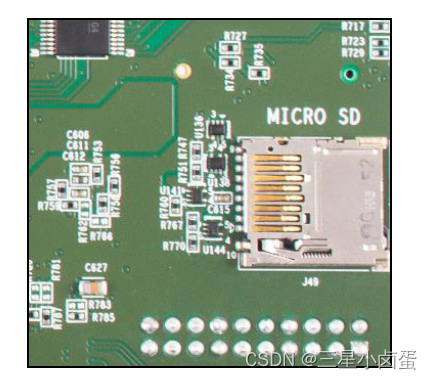
| 7 | SD卡 |
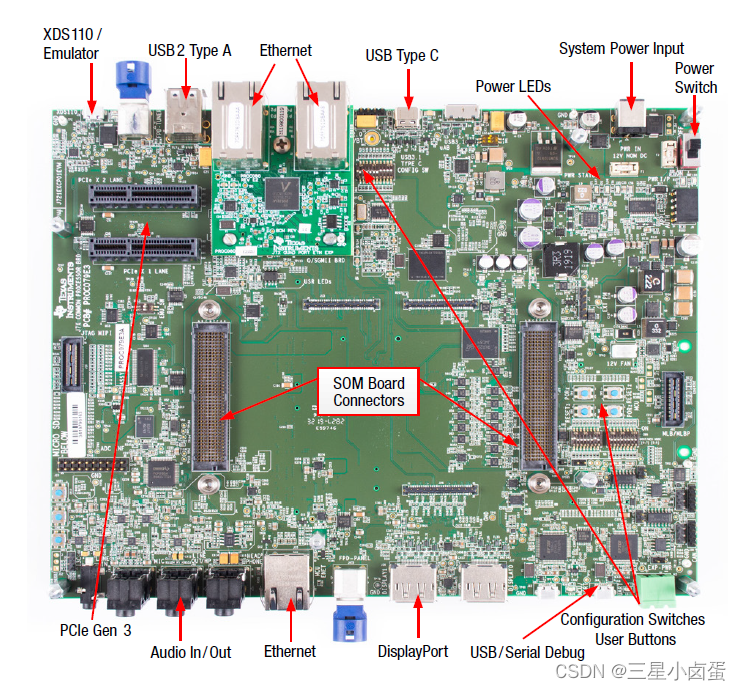
 TDA4VM开发板正面各接口名称
TDA4VM开发板正面各接口名称
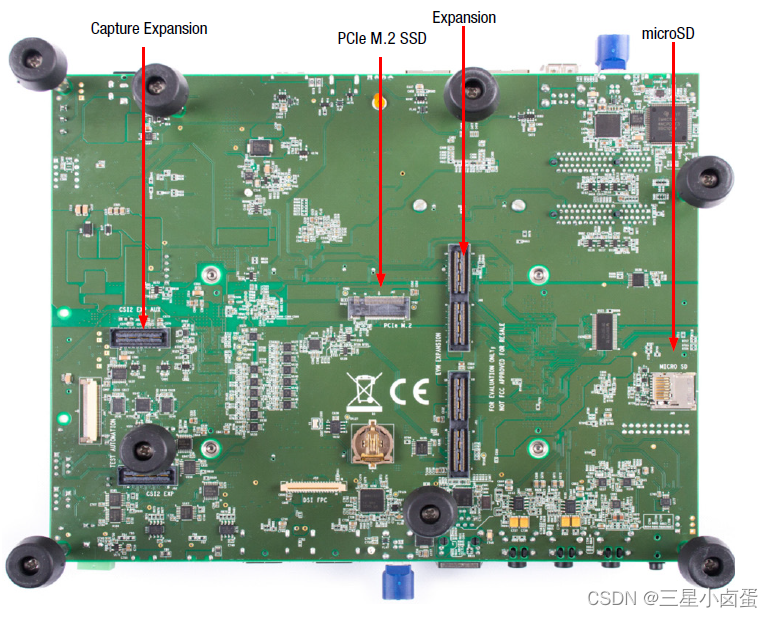
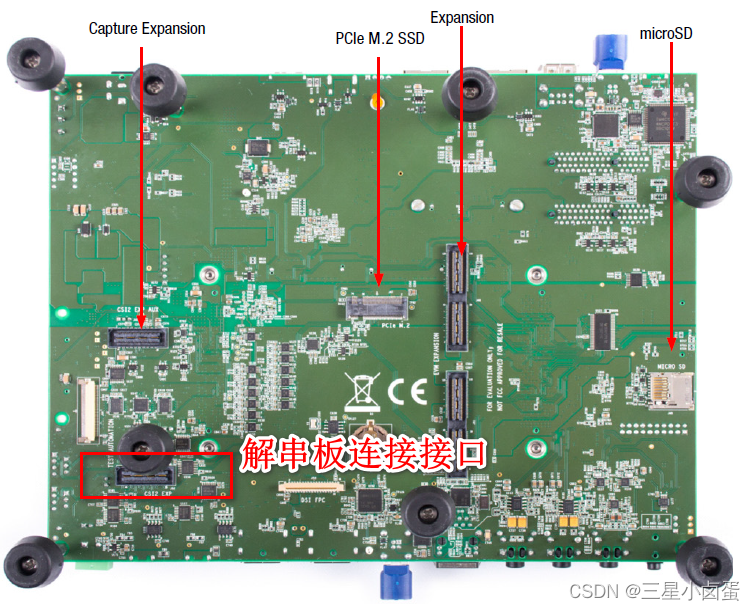
TDA4VM开发板背面面各接口名称
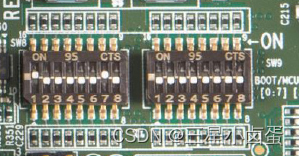
制作SD启动卡,插入SD卡,连接USB串口线束(Linux操作系统下使用minicom串口通信工具),DP线束连接显示器,调试拨码开关为SD卡启动方式(1000 0010 0000 0000),供电打开电源开关,即可在minicom软件中打印启动log。
2、调试过程
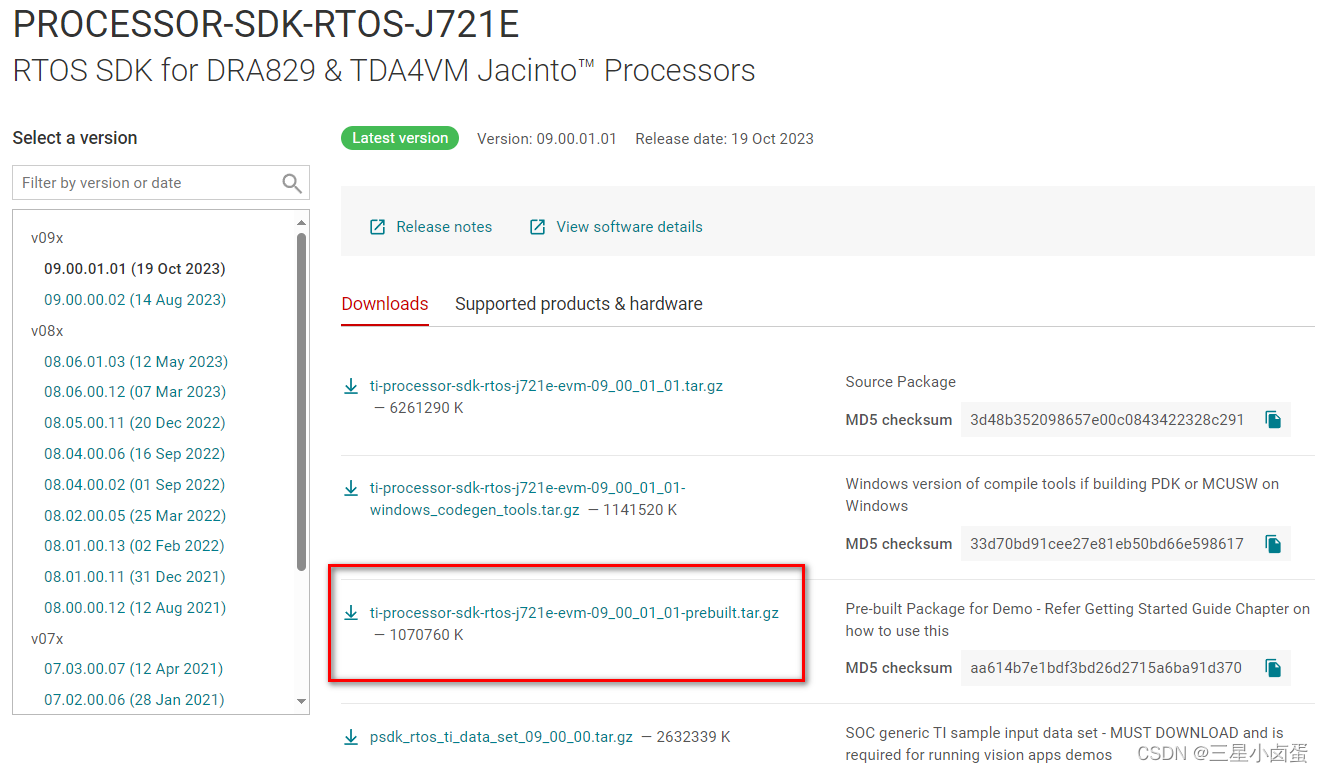
2.1 下载预编译的PSDK RTOS
下载并解压预编译的文件:ti-processor-sdk-rtos-j721e-evm--prebuilt.tar.gz
Tips:
需要根据所需版本下载:下载链接
选择Download options
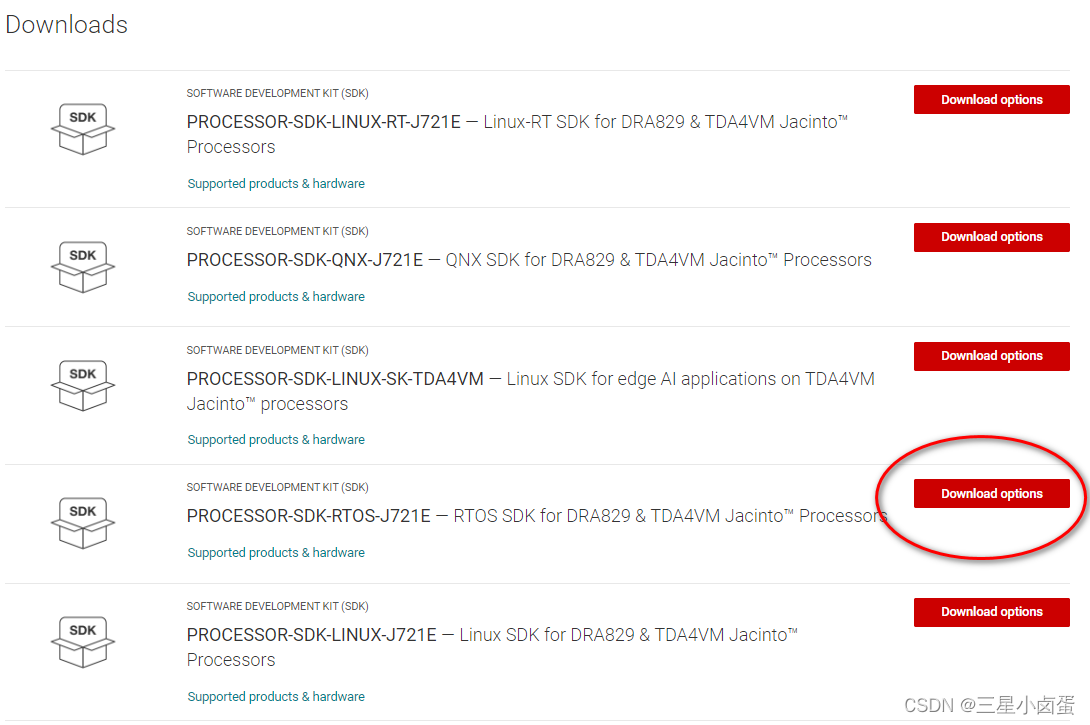 根据所需版本,下载Demo案例:ti-processor-sdk-rtos-j721e-evm--prebuilt.tar.gz
根据所需版本,下载Demo案例:ti-processor-sdk-rtos-j721e-evm--prebuilt.tar.gz
2.2 准备SD卡
使用预编译压缩包中的脚本 mk-linux-card.sh 来制作分区:
1、使用命令“df -h”,查看电脑是否识别到SD卡;
2、在运行脚本之前,先卸载SD卡。例如,你的SD卡挂载到设备:/dev/sdb ,有两个分区,执行如下命令,取消挂载:
umount /dev/sdb1
umount /dev/sdb2
或者
umount /dev/sdb* //表示卸载所有sdb设备
3、运行如下脚本,对SD卡分区,运行过程中所有的问题均回答“y”;
sudo ./mk-linux-card.sh /dev/sdb
2.3 安装文件系统和启动文件
- 执行以下脚本 install_to_sd_card.sh 能够将预编译文件夹中的文件系统/启动文件/数据包拷贝到SD卡对应的文件夹中
./install_to_sd_card.sh
- 拔出SD卡插入EVM开发板中
2.3 EVM运行
-
硬件连接:
连接UART/USB线束到PC,并设置minicom串口终端;

连接摄像头的解串板(自行购买)到开发板上;
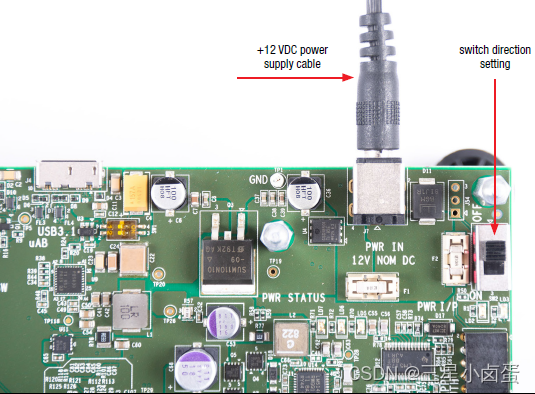
供电
使用DP线束连接显示屏到开发板上;

拨动拨码开关,选择SD卡启动模式(1000 0010 0000 0000);
插入SD卡; -
EVM上电
-
只有第一次才需要的操作:在运行预编译的文件系统之前,uboot环境可能需要被清空。在上电后,需要按下enter键打断启动过程,从而进入uboot模式,输入如下命令可以清除环境变量并保存更改。
env default –a –f
saveenv
- EVM重新上电
- 在UART串口终端中可以看见打印的log信息,bootloader将会启动linux内核,启动成功出现登录界面:
j7-evm login:
- 在EVM设备上,使用如下用户ID,无需登录密码
root
- 在EVM设备上,运行如下步骤来初始化demo环境
cd /opt/vision_apps
source ./vision_apps_init.sh
- 运行如下其中一个脚本/应用程序来运行demo程序
./run_app_tidl.sh - Image classification demo (needs display)
./run_app_tidl_cam.sh - Camera based Image classification demo (needs display, Fusion1 board, 1x IMX390 camera)
./run_app_tidl_seg.sh - Semantic segmentation demo (needs display)
./run_app_tidl_od.sh - Object Detection demo (needs display)
./run_app_tidl_avp.sh - Auto valet parking demo (needs display)
./run_app_tidl_avp2.sh - Auto valet parking demo (needs display)
./run_app_tidl_avp3.sh - Auto valet parking demo (needs display)
./run_app_tidl_avp4.sh - Auto valet parking demo (needs display, Fusion1 board, 4x IMX390 camera)
./run_app_dof.sh - Dense optical flow demo (needs display)
./run_app_stereo.sh - Stereo disparity demo (needs display)
./run_app_c7x.sh - C7x sample kernel demo
./run_app_srv.sh - 3D SRV 4 camera demo (needs display, Fusion1 board, 4x IMX390 camera)
./run_app_single_cam.sh - Single camera + VISS + Display demo (needs display, Fusion1 board, 1x IMX390 or compatible cameras)
./run_app_multi_cam.sh - Multi (upto 8x) camera + VISS + Display demo (needs display, Fusion1 board, IMX390 or compatible cameras)
./vx_app_arm_opengl_mosaic.out - OpenGL + OpenVX test
./vx_app_arm_ipc.out - inter processor communication test
./vx_app_arm_mem.out - memory allocation test
./vx_app_tutorial.out - TI OpenVX tutorial
./vx_app_conformance.out - TI OpenVX conformance tests
- 一旦demo程序运行,便可以看到显示屏上的视频输出。
TDA4VM芯片的启动流程,可以参考这篇。SBL启动流程简介














 670
670











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









