







 本文深入探讨了广度优先搜索(BFS)的概念、原理及其在解决多种搜索问题中的应用,包括寻找目标节点、求解最优路径等。通过具体实例,如瓷砖、填涂颜色、求细胞数量等,展示了BFS在不同场景下的实现方法。
本文深入探讨了广度优先搜索(BFS)的概念、原理及其在解决多种搜索问题中的应用,包括寻找目标节点、求解最优路径等。通过具体实例,如瓷砖、填涂颜色、求细胞数量等,展示了BFS在不同场景下的实现方法。
广度优先遍历
广度优先遍历(Breadth_First_Search),又称为广度优先搜索,简称BFS。
图的BFS类似于树的层序遍历。
广度优先遍历
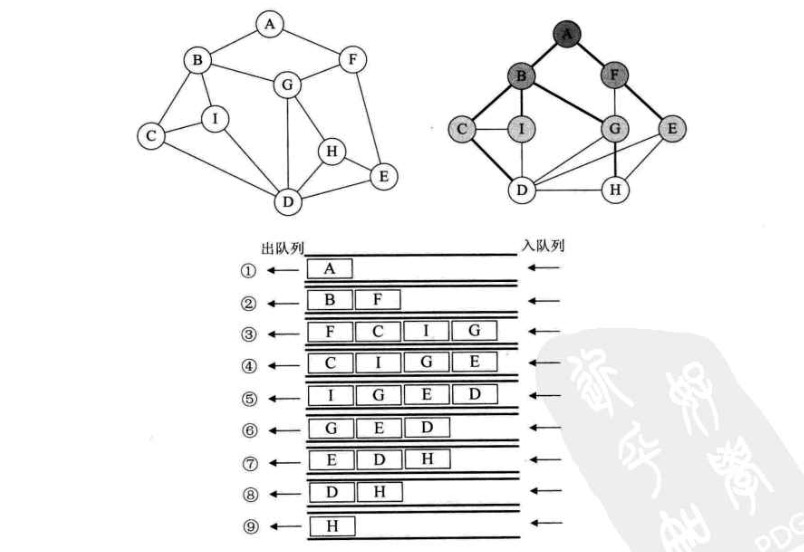
- 如图将左边的图变形,得到右边的图,然后一层一层的遍历。
- 这里借助一个队列来实现一层一层的遍历。
搜索问题一般有两种情况:一种是给出初始结点,要求寻找符合约束条件的目标结点;另一种是给出初始结点和目标结点,要求找到从初始结点到目标结点的一条路径。对于解的要求也不尽相同,有的问题要求出一个可行解,有的则要求出最优解,还有的问题要找出全部解,有时还要按照一定的顺序输出。
搜索问题中的数据结构一般要求表达要合理,有助于计算机的处理;信息要完整,能反应出状态的本质和状态之间的关系;还要节省存储空间,尽可能地提高搜索的速度。比如分油问题本来用一个三元组(x10,x7,x3)即可,但是为了输出方便,我们增加一个d,用来表示该结点的父结点(由谁拓展而来),即变成一个四元组(x10,x7,x3,d)。另外,还会用到队列来实现控制策略。当然,不能忘记状态变化过程中的重复性检查,比如哈希表,因为大多数情况下,出现重复状态是毫无意义的,会造成死循环和空间的浪费。
4. 宽度优先搜索的基本思想
宽度优先搜索(Breadth First Search,BFS),简称宽搜,又称广度优先搜索。它是从初始结点开始,应用产生式规则和控制策略生成第一层结点,同时检查目标结点是否在这些生成的结点中。若没有,再用产生式规则将所有第一层结点逐一拓展,得到第二层结点,并逐一检查第二层结点是否包含目标结点。若没有,再用产生式规则拓展第二层结点。如此依次拓展,检查下去,直至发现目标结点为止。如果拓展完所有结点,都没有发现目标结点,则问题无解。
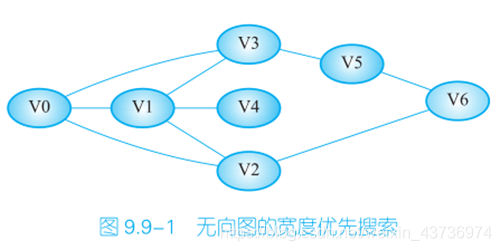
对于以上“无向图”,从顶点 V0 开始进行宽度优先搜索,得到的一个序列为 V0,V1,V2,V3,V4,V6,V5。
宽度优先搜索是一种“盲目”搜索,所有结点的拓展都遵循“先进先出”的原则,所以采用“队列”来存储这些状态。
宽度优先搜索的算法框架如下:
void BFS
{ while (front <= rear) // 当队列非空时做,front 和 rear 分别表示队列的头指针和尾指针
{ if (找到目标状态)
做相应处理(如退出循环输出解、输出当前解、比较解的优劣);
else
{ 拓展头结点 ;
if( 拓展出的新结点没出现过 )
{ rear++;
将新结点插到队尾 ;
}
}
front++;// 取下一个结点
}
}如果只要求任意一个解,也可以写成以下的结构:
void BFS2
{ p = true;
while (p)
{ if( 头结点是目标状态 ) p = false;
else
{ 拓展头结点 ;
if( 拓展出的新结点没出现过 )
{ rear++;
将新结点插到队尾 ;
}
front++;
if(front > rear)p = false;
}
}
}图的DFS与BFS
- 图的深度优先搜索算法和广度优先搜索算法在时间复杂度上是一样的。
- 深度优先更适合目标比较明确,以找到目标为目的的情况。
- 广度优先更适合在不断扩大遍历范围时找到相对最优解的情况
四、应用举例:
1、瓷砖
【问题描述】
在一个 w×h 的矩形广场上,每一块 1×1 的地面都铺设了红色或黑色的瓷砖。小林同学站在某一块黑色的瓷砖上,他可以从此处出发,移动到上、下、左、右四个相邻的且是黑色的瓷砖上。现在,他想知道,通过重复上述移动所能经过的黑色瓷砖数。
【输入格式】
第 1 行为 h、w,2≤w、h≤50,之间由一个空格隔开。
以下为一个 w 行 h 列的二维字符矩阵,每个字符为“.”“#”“@”,分别表示该位置为黑色的瓷砖、红色的瓷砖,以及小林的初始位置。
【输出格式】
输出一行一个整数,表示小林从初始位置出发可以到达的瓷砖数。
【输入输出样例】
11 9
.#.........
.#.#######.
.#.#.....#.
.#.#.###.#.
.#.#..@#.#.
.#.#####.#.
.#.......#.
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3013
3013

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









