







在 Android O 中,系统启动时,就会启动 CameraProvider 服务。它将 Camera HAL 从 cameraserver 进程中分离出来,作为一个独立进程 android.hardware.camera.provider@2.4-service 来控制 HAL。
这两个进程之间通过 HIDL 机制进行通信。
camera provider 启动
- android/hardware/interfaces/camera/provider/2.4/default/android.hardware.camera.provider@2.4-service.rc
service vendor.camera-provider-2-4 /vendor/bin/hw/android.hardware.camera.provider@2.4-service
class hal
user cameraserver
group audio camera input drmrpc
ioprio rt 4
capabilities SYS_NICE
writepid /dev/cpuset/camera-daemon/tasks /dev/stune/top-app/tasks
在android启动的过程中,init进程调用该脚本启动 camera provider 服务。根据该目录下的 Android.bp 可以知道,其实就是运行该目录下 service.cpp 编译的可执行文件,service.cpp 内容如下:
int main()
{
ALOGI("Camera provider Service is starting.");
// The camera HAL may communicate to other vendor components via
// /dev/vndbinder
android::ProcessState::initWithDriver("/dev/vndbinder");
return defaultPassthroughServiceImplementation<ICameraProvider>("legacy/0", /*maxThreads*/ 6);
}
根据以上代码可以得知:
android::ProcessState::initWithDriver :camera HAL 通过 /dev/vndbinder 驱动可与其他模块的HAL进行通信;
defaultPassthroughServiceImplementation :创建默认为直通模式(passthrough)的 CameraProvider 服务;
LegacySupport.h
文件路径:android/system/libhidl/transport/include/hidl
/**
* Registers passthrough service implementation.
*/
template<class Interface>
__attribute__((warn_unused_result))
status_t registerPassthroughServiceImplementation(
std::string name = "default") {
/* 获得CameraProvider实例化对象(不是Binder代理),(此处的name为 “legacy/0”) */
sp<Interface> service = Interface::getService(name, true /* getStub */);
if (service == nullptr) {
ALOGE("Could not get passthrough implementation for %s/%s.",
Interface::descriptor, name.c_str());
return EXIT_FAILURE;
}
LOG_FATAL_IF(service->isRemote(), "Implementation of %s/%s is remote!",
Interface::descriptor, name.c_str());
/* 将 CameraProvider 注册为一个服务,其他进程需要使用camera HAL层时,通过Binder
* 得到 CameraProvider 代理类即可操作 camera HAL层,不需要每次都dlopen(HAL.so)
* */
status_t status = service->registerAsService(name);
if (status == OK) {
ALOGI("Registration complete for %s/%s.",
Interface::descriptor, name.c_str());
} else {
ALOGE("Could not register service %s/%s (%d).",
Interface::descriptor, name.c_str(), status);
}
return status;
}
获取 CameraProvider 实例对象
从 LegacySupport.h 可以知道,defaultPassthroughServiceImplementation为模板类函数,将会通过 sp service = ICameraProvider::getService(name, true /* getStub */) 获取 CameraProvider 实例化对象,以上操作,将会进入 CameraProviderAll.cpp。
CameraProviderAll.cpp
文件路径:android/out/soong/.intermediates/hardware/interfaces/camera/provider/2.4/android.hardware.camera.provider@2.4_genc++/gen/android/hardware/camera/provider/2.4
// static
::android::sp<ICameraProvider> ICameraProvider::getService(const std::string &serviceName, const bool getStub) {
return ::android::hardware::details::getServiceInternal<BpHwCameraProvider>(serviceName, true, getStub);
}
HidlTransportSupport.h
文件路径:android/system/libhidl/transport/include/hidl
template <typename BpType, typename IType = typename BpType::Pure,
typename = std::enable_if_t<std::is_same<i_tag, typename IType::_hidl_tag>::value>,
typename = std::enable_if_t<std::is_same<bphw_tag, typename BpType::_hidl_tag>::value>>
sp<IType> getServiceInternal(const std::string& instance, bool retry, bool getStub) {
using ::android::hidl::base::V1_0::IBase;
sp<IBase> base = getRawServiceInternal(IType::descriptor, instance, retry, getStub);
if (base == nullptr) {
return nullptr;
}
if (base->isRemote()) {
// getRawServiceInternal guarantees we get the proper class
return sp<IType>(new BpType(toBinder<IBase>(base)));
}
return IType::castFrom(base);
}
其中,参数 BpHwCameraProvider::descriptor 为android.hardware.camera.provider@2.4::ICameraProvider,instance 为 “legacy/0” ,retry 为 true,getStub 为 true。
ServiceManagement.cpp
文件路径:android/system/libhidl/transport
在调用 getRawServiceInternal() 函数时,由于我们的参数 getStub 为 true,所以,该函数主要执行以下部分:
sp<::android::hidl::base::V1_0::IBase> getRawServiceInternal(const std::string& descriptor,
const std::string& instance,
bool retry, bool getStub) {
...
/* getStub 为 true,直通模式,将返回CameraProvider实例对象 */
if (getStub || vintfPassthru || vintfLegacy) {
/* 获取ServiceManager代理 */
const sp<IServiceManager> pm = getPassthroughServiceManager();
if (pm != nullptr) {
/* 获取CameraProvider实例对象 */
sp<IBase> base = pm->get(descriptor, instance).withDefault(nullptr);
if (!getStub || trebleTestingOverride) {
base = wrapPassthrough(base);
}
return base;
}
}
return nullptr;
}
struct PassthroughServiceManager : IServiceManager1_1 {
static void openLibs(
const std::string& fqName,
const std::function<bool /* continue */ (void* /* handle */, const std::string& /* lib */,
const std::string& /* sym */)>& eachLib) {
//fqName looks like android.hardware.foo@1.0::IFoo
/* fqName = android.hardware.camera.provider@2.4::ICameraProvider */
size_t idx = fqName.find("::");
if (idx == std::string::npos ||
idx + strlen("::") + 1 >= fqName.size()) {
LOG(ERROR) << "Invalid interface name passthrough lookup: " << fqName;
return;
}
std::string packageAndVersion = fqName.substr(0, idx);
std::string ifaceName = fqName.substr(idx + strlen("::"));
/* prefix = android.hardware.camera.provider@2.4-impl */
const std::string prefix = packageAndVersion + "-impl";
/* sym = HIDL_FETCH_ICameraProvider */
const std::string sym = "HIDL_FETCH_" + ifaceName;
constexpr int dlMode = RTLD_LAZY;
void* handle = nullptr;
dlerror(); // clear
static std::string halLibPathVndkSp = android::base::StringPrintf(
HAL_LIBRARY_PATH_VNDK_SP_FOR_VERSION, details::getVndkVersionStr().c_str());
std::vector<std::string> paths = {HAL_LIBRARY_PATH_ODM, HAL_LIBRARY_PATH_VENDOR,
halLibPathVndkSp, HAL_LIBRARY_PATH_SYSTEM};
for (const std::string& path : paths) {
std::vector<std::string> libs = search(path, prefix, ".so");
for (const std::string &lib : libs) {
const std::string fullPath = path + lib;
/* 经过上面的一些添加转换,最终
* fullPath = /vendor/lib/hw/android.hardware.camera.provider@2.4-impl.so
* */
if (path == HAL_LIBRARY_PATH_SYSTEM) {
handle = dlopen(fullPath.c_str(), dlMode);
} else {
handle = android_load_sphal_library(fullPath.c_str(), dlMode);
}
if (handle == nullptr) {
const char* error = dlerror();
LOG(ERROR) << "Failed to dlopen " << lib << ": "
<< (error == nullptr ? "unknown error" : error);
continue;
}
/* Lambda表达式代入 */
if (!eachLib(handle, lib, sym)) {
return;
}
}
}
}
Return<sp<IBase>> get(const hidl_string& fqName,
const hidl_string& name) override {
sp<IBase> ret = nullptr;
/* [&] 此处为Lambda表达式,简单理解为函数指针即可,先执行 openLibs() */
openLibs(fqName, [&](void* handle, const std::string &lib, const std::string &sym) {
/* handle :dlopen() 的返回值
* lib :android.hardware.camera.provider@2.4-impl.so
* sym :HIDL_FETCH_ICameraProvider
*/
IBase* (*generator)(const char* name);
/* 返回 HIDL_FETCH_ICameraProvider() 函数对应的函数地址 */
*(void **)(&generator) = dlsym(handle, sym.c_str());
if(!generator) {
const char* error = dlerror();
LOG(ERROR) << "Passthrough lookup opened " << lib
<< " but could not find symbol " << sym << ": "
<< (error == nullptr ? "unknown error" : error);
dlclose(handle);
return true;
}
/* 执行 HIDL_FETCH_ICameraProvider() 函数,该函数返回CameraProvider实例对象保存在ret,
* 所以get()函数将返回 ret
* */
ret = (*generator)(name.c_str());
if (ret == nullptr) {
dlclose(handle);
return true; // this module doesn't provide this instance name
}
// Actual fqname might be a subclass.
// This assumption is tested in vts_treble_vintf_test
using ::android::hardware::details::getDescriptor;
std::string actualFqName = getDescriptor(ret.get());
CHECK(actualFqName.size() > 0);
registerReference(actualFqName, name);
return false;
});
return ret;
}
}
get() 函数传递进来的fpName为 android.hardware.camera.provider@2.4::ICameraProvider ,name为 legacy/0。
CameraProvider.cpp
文件路径:android/hardware/interfaces/camera/provider/2.4/default
ICameraProvider* HIDL_FETCH_ICameraProvider(const char* name) {
/* 传递进来的 name 为 legacy/0,而 kLegacyProviderName 定义为 legacy/0 */
if (strcmp(name, kLegacyProviderName) == 0) {
/* 创建CameraProvider对象,构造函数将会调用initialize() 函数 */
CameraProvider* provider = new CameraProvider();
if (provider == nullptr) {
ALOGE("%s: cannot allocate camera provider!", __FUNCTION__);
return nullptr;
}
if (provider->isInitFailed()) {
ALOGE("%s: camera provider init failed!", __FUNCTION__);
delete provider;
return nullptr;
}
return provider;
} else if (strcmp(name, kExternalProviderName) == 0) {
ExternalCameraProvider* provider = new ExternalCameraProvider();
return provider;
}
ALOGE("%s: unknown instance name: %s", __FUNCTION__, name);
return nullptr;
}
bool CameraProvider::initialize() {
camera_module_t *rawModule;
/* 在通过 hw_get_module() 加载HAL层so:其实是通过获取各种android属性
* (在设备端可以通过 getprop 命令查看当前设备支持的属性),
* 得到HAL so的名称(*variant_keys[]),而后探测、加载该HAL so库,并通
* 过 dlsym() 函数返回标识符为 HAL_MODULE_INFO_SYM_AS_STR 的HMI地址
* (由于各个HAL层代码最终会通过 HAL_MODULE_INFO_SYM 修饰,编译器识别到
* 该符号时将会将标示地址导出为HMI符号,从而在加载HAL so时可以获取)
*/
int err = hw_get_module(CAMERA_HARDWARE_MODULE_ID,
(const hw_module_t **)&rawModule);
if (err < 0) {
ALOGE("Could not load camera HAL module: %d (%s)", err, strerror(-err));
return true;
}
/* rawModule 将指向 HAL 中的 camera_module_t 类型结构体,
* 此时,CameraProvider 与 camera HAL 绑定成功,可以通过
* CameraProvider操作camera HAL
*/
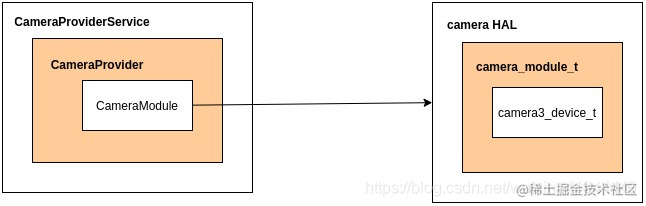
/* 创建 CameraModule 对象 */
/* CameraModule.cpp:android/hardware/interfaces/camera/common/1.0/default */
mModule = new CameraModule(rawModule);
/* mModule->init()主要完成以下操作:
* 1. 当camera HAL的 module_api_version >= CAMERA_MODULE_API_VERSION_2_4,将调用HAL->init()
* 2. 通过 HAL getNumberOfCameras() 获取设置camera数量,并将该参数设置为 mCameraInfoMap 容器的大小
* */
err = mModule->init();
if (err != OK) {
ALOGE("Could not initialize camera HAL module: %d (%s)", err, strerror(-err));
mModule.clear();
return true;
}
ALOGI("Loaded \"%s\" camera module", mModule->getModuleName());
...
mNumberOfLegacyCameras = mModule->getNumberOfCameras();
for (int i = 0; i < mNumberOfLegacyCameras; i++) {
struct camera_info info;
/* 将获取camera信息并保存,其中将有HAL version 信息,应用
* 层将会检查HAL层版本信息从而确认调用不同的API实现相机应用
*/
auto rc = mModule->getCameraInfo(i, &info);
if (rc != NO_ERROR) {
ALOGE("%s: Camera info query failed!", __func__);
mModule.clear();
return true;
}
...
}
return false; // mInitFailed
}
至此,已获得CameraProvider实例对象,最终返回赋值给 registerPassthroughServiceImplementation() 函数中的 service 。
将 CameraProvider 注册为服务
在得到CameraProvider实例对象之后,将通过 service->registerAsService(name) 进行服务注册。
::android::status_t ICameraProvider::registerAsService(const std::string &serviceName) {
::android::hardware::details::onRegistration("android.hardware.camera.provider@2.4", "ICameraProvider", serviceName);
const ::android::sp<::android::hidl::manager::V1_0::IServiceManager> sm
= ::android::hardware::defaultServiceManager();
if (sm == nullptr) {
return ::android::INVALID_OPERATION;
}
/* 通过add(),最终调用到 ServiceManagerAll.cpp
(路径是android/out/soong/.intermediates/system/libhidl/transport/manager/1.0/
android.hidl.manager@1.0_genc++/gen/android/hidl/manager/1.0)
中的BpHwServiceManager::add()进行注册服务
*/
::android::hardware::Return<bool> ret = sm->add(serviceName.c_str(), this);
return ret.isOk() && ret ? ::android::OK : ::android::UNKNOWN_ERROR;
}
由于当前CameraProvider是通过hidl进行相应的操作,这部分的内容可以在网上进行搜索,这里就不再进行相应的跟踪了。(主要是我也不懂:-D)
最后
当CameraProvider注册为服务之后,CameraService运行时,将会与之进行通信进而操作camera HAL,这样,HAL与Service进行了一道隔离。下图为在跟踪代码过程中,记录的UML图。

参考文章
在了解学习CameraProvider服务的过程中,参考了网上很多的优秀文章,感谢!
[Android O] Camera 服务启动流程简析
Android P之Camera HAL3流程分析
Android Camera原理之camera provider启动
原文链接:https://blog.csdn.net/weixin_41944449/article/details/99453461















 1299
1299











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









