







一、算法思想
希尔排序:先追求表中元素部分有序,再逐渐逼近全局有序。
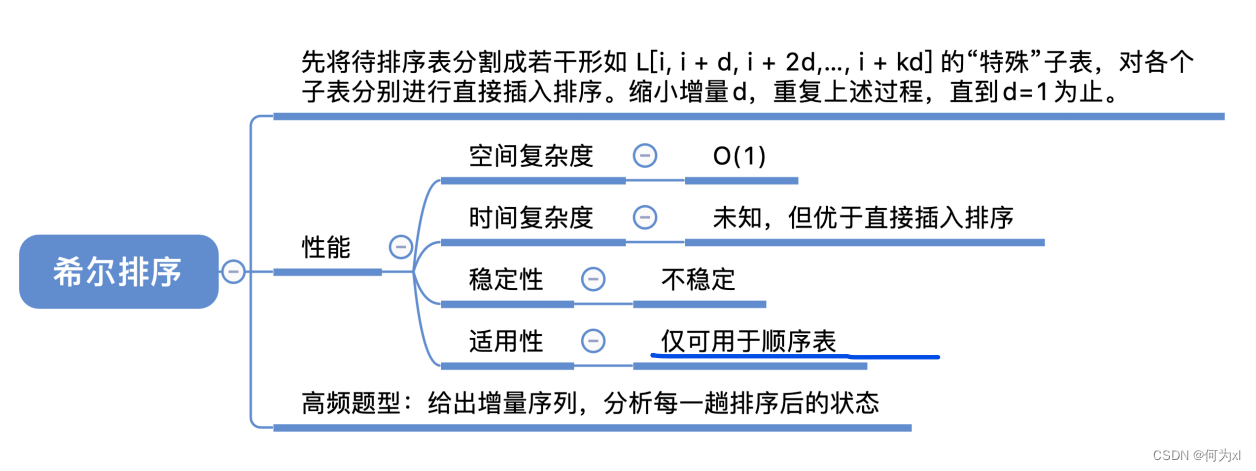
先将待排序表分割成若⼲形如 L [ i , i + d , i + 2 d , … , i + k d ] L[i, i + d, i + 2d,…, i + kd] L[i,i+d,i+2d,…,i+kd] 的“特殊”⼦表,对各个⼦表分别进⾏直接插⼊排序。缩⼩增量d,重复上述过程,直到d=1为⽌。
二、算法过程
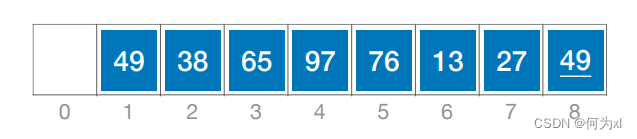
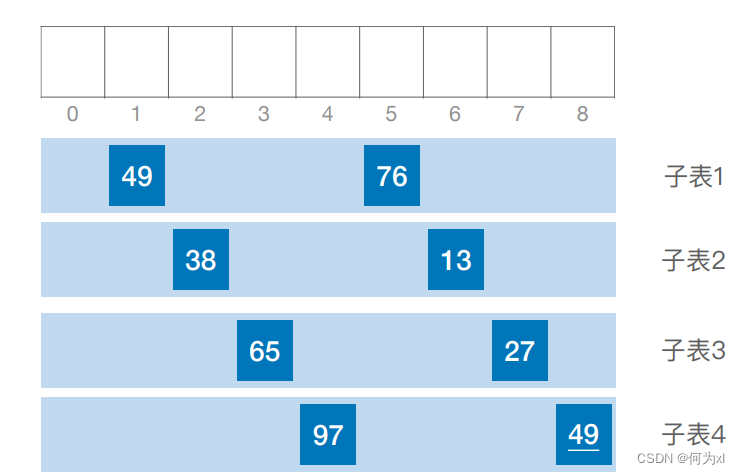
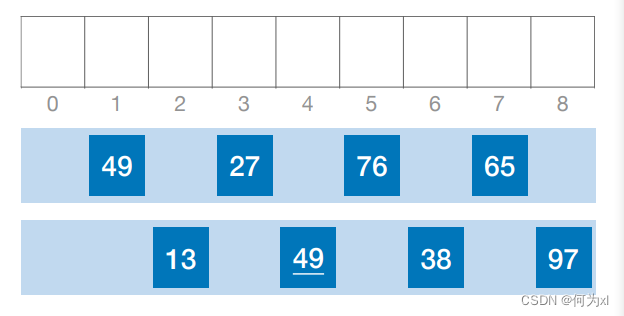
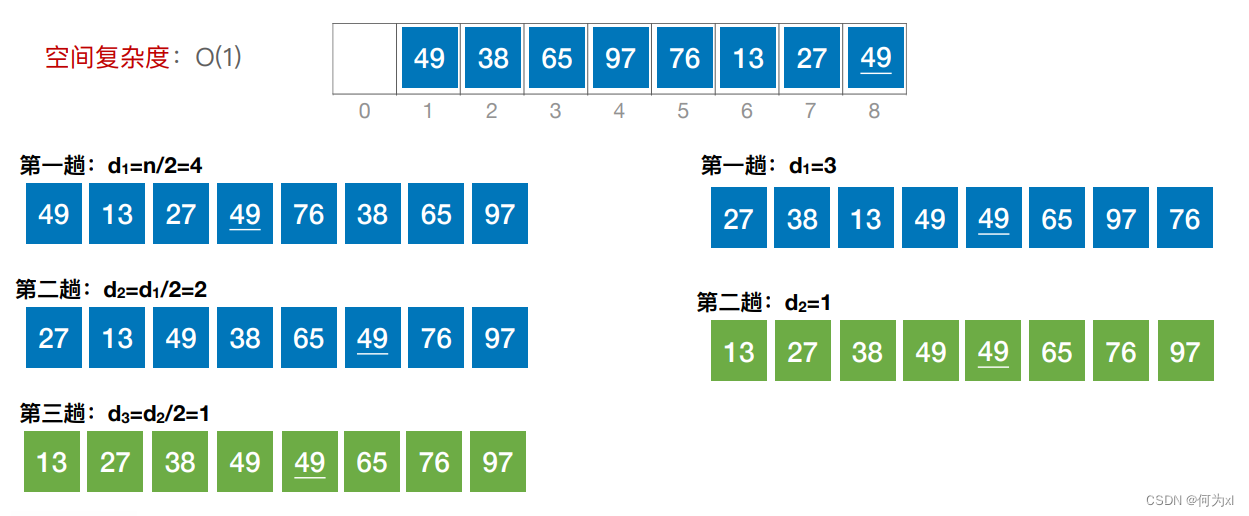
第⼀趟: d 1 = n / 2 = 4 d_1=n/2=4 d1=n/2=4
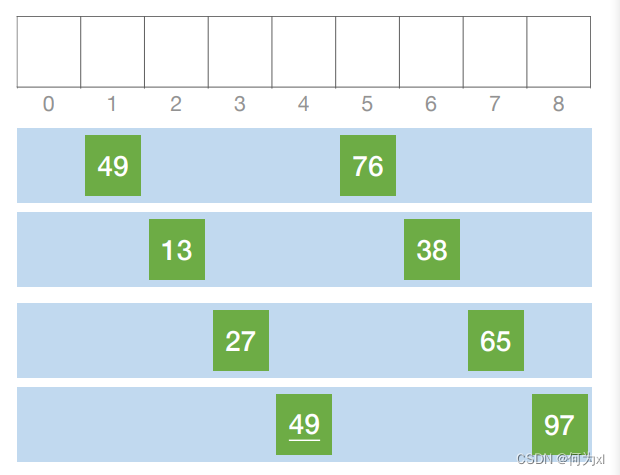
对上述的四个子表分别进行排序,排序结果图如下:
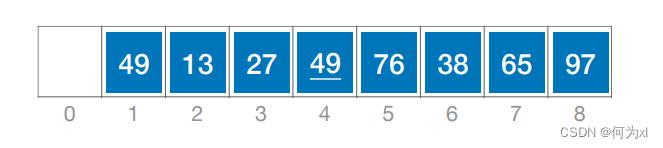
第⼆趟: d 2 = d 1 / 2 = 2 d_2=d_1/2=2 d2=d1/2=2
对上述的两个子表分别进行排序,排序结果图如下:


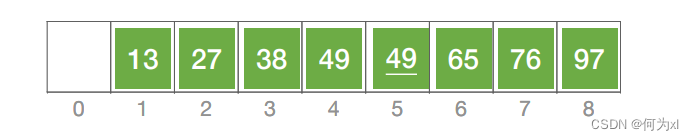
第三趟: d 3 = d 2 / 2 = 1 d_3=d_2/2=1 d3=d2/2=1
当 d = 1 d=1 d=1 时,整个表已呈现出“基本有序”,对整体再进⾏⼀次“直接插⼊排序”
过程总结:

算法实现
//希尔排序
void Shellsort(int A[ ] ,int n){
int d, i, j;
//A[0]只是暂存单元,不是哨兵,当j<=0时,插入位置已到
for(d= n/2; d>=1; d=d/2)
{//步长变化
for( i=d+1; i<=n; ++i)
{
if(A[i]<A[i-d] ){ //需将A[i]插入有序增量子表
A[0]=A[i]; //暂存在A[0]
for(j= i-d; j>0 && A[0]<A[jl; j-=d)
A[j+d]=A[j]; //记录后移,查找插入的位置
A[j+d]=A[0];//插入
}//if
}
}
}
算法性能分析
时间复杂度:和增量序列
d
1
,
d
2
,
d
3
…
d_1, d_2, d_3…
d1,d2,d3… 的选择有关,⽬前⽆法⽤数学⼿段证明确切的时间复杂度
最坏时间复杂度为
O
(
n
2
)
O(n^2)
O(n2),当n在某个范围内时,可达
O
(
n
1
.
3
)
O(n^1.3)
O(n1.3)
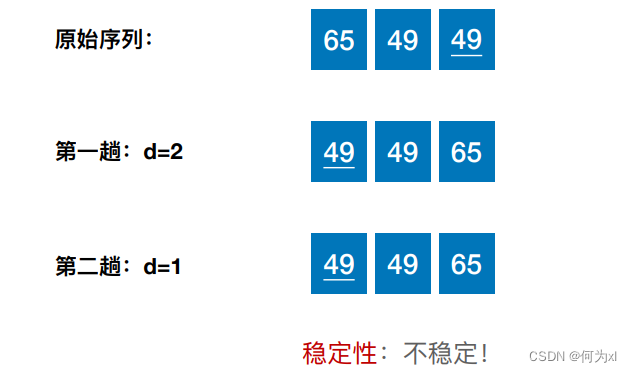
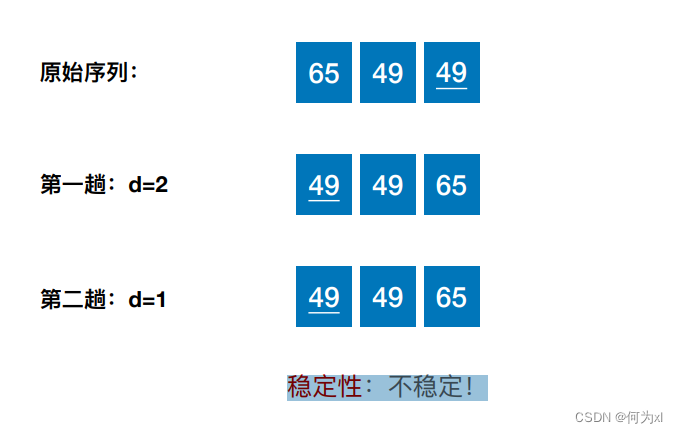
稳定性:不稳定!
适⽤性:仅适⽤于顺序表,不适⽤于链表
















 5万+
5万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











