







七月份要参加一个自动泊车的仿真比赛,这里记录一下看的一些论文,主要是自动泊车的基础内容和数学建模。
一、基于超声波车位探测系统的自动泊车方法研究
这篇论文是合工大魏振亚的硕士毕业论文,暂且不提里面的内容,个人怀疑这篇论文有学术造假的嫌疑,里面的公式和图片错误多到离谱,公式和图片我会将部分修改后的放一下,看的时候简直想去知网举报这个人。
这篇论文使用的传感器是超声波传感器,对于自动泊车的场景,一般划分为平行车位和垂直车位,也就是侧方停车和倒库。不管是哪一种场景,第一步都是检测这个车位的大小是否符合要求。两种场景的区别就在于检测的时候的比较标准。
对于侧方停车,相当于车位的长要大于宽,也就是下图所示的场景:
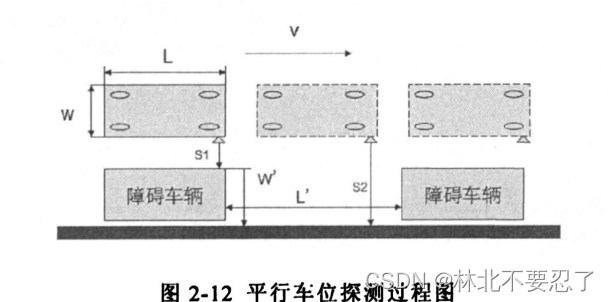
对于这种情况,首先要利用超声波传感器,对距离进行持续的检测,这里主要是看位于车辆侧边的传感器,如果检测到距离上的突变,也就是进入到了车位的水平范围内,那么就开始累积长度,也就是计算上图中的L’,一直累积直到又产生了一个距离上的突变,这里的突变与上一次突变正好反着,第一次是距离由近而远的突变,第二次则是由远到近的突变。开过车位之后,就可以根据传感器的数据,计算得到车位的大小,利用这个大小和设定的车辆大小做比较,如果符合条件则认为车位是一个大小上符合条件的车位,才进行后续的判断,否则就继续监测距离的突变。
对于倒库的情况,本质检测的思路是一样的,场景如下图:
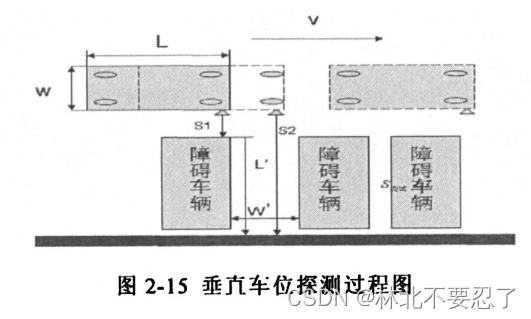
还是用同样的思路去检测,唯一的区别就是检查车位是不是足够大的时候,把长和宽换一下。
如果检测到车位大小符合要求,就可以进行泊车路径的规划,论文按照下图所示构建了坐标系:
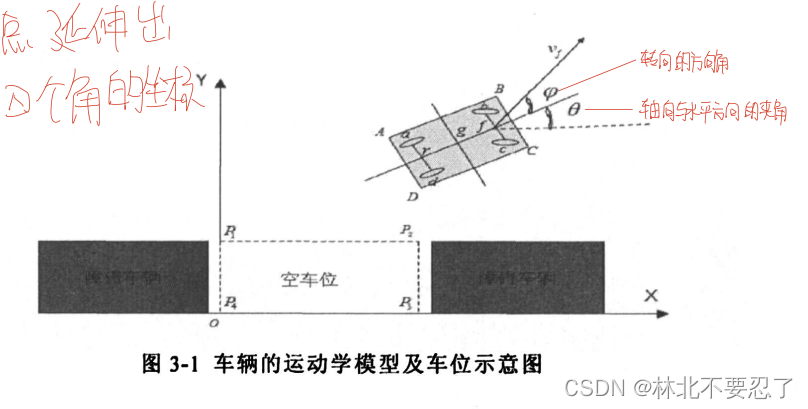
车位的左下角作为坐标系的原点,车辆的几何中心为g,以此延伸出四个轮子、四个角以及前后轴中心的坐标。这篇论文也就是从这开始,出现大量公式和图片的错误。根据几何关系,可以列出前后轴中心点fr的坐标:

这里插一嘴,车的长被划分为三段:前悬、轴距和后悬,前悬指的是车前轴到车头的距离,轴距是前轴和后轴之间的距离,后悬则是后轴到车尾的距离。上面图中,l对应的就是轴距,也就是fr之间的距离。算出前轴和后轴的中心的坐标,就可以以此计算车轮接地点abcd的坐标,本质上就是根据几何关系去写关系式,不知为何这种公式论文作者都能写错,更不知为何论文的评审是怎么过的,修改后的公式如下:
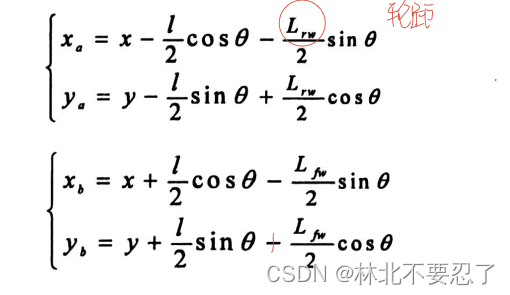
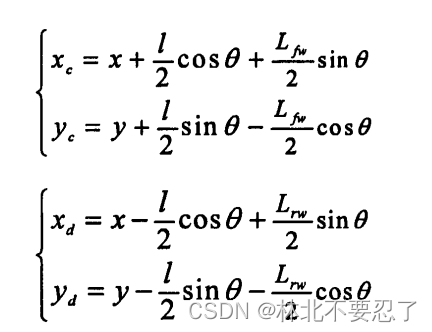
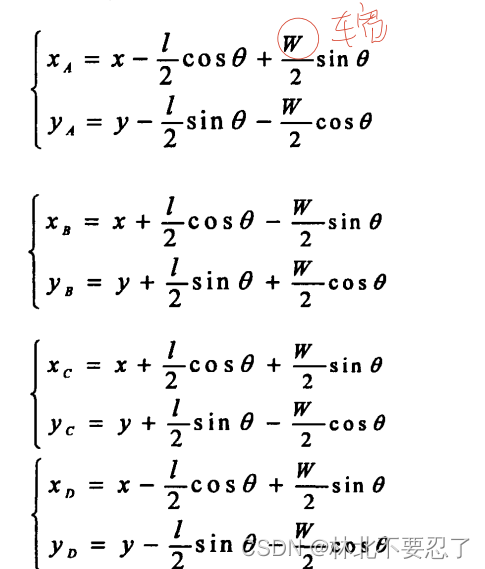
yb的计算应该把减号换成加号。其中Lfw和Lrw表示的是轮距,即车轮在同一个平面的距离。同理,也可以计算出汽车四个顶点ABCD的坐标,这四组公式错的就更离谱了,里面的所有l都应该换成L,即将轴距换成车长,没修改的公式为:
列这些式子主要是为了后面的推理,在倒车过程中,一般假设车辆是一个低速的状态,在这种状态下,后轮不会出现侧向的偏移,也就是说我们将xy两个方向上的位移按照延行驶方向和垂直于行驶方向两个方向进行分解,那么在垂直于行驶方向上的分量的矢量和应该是零,即下面的式子:
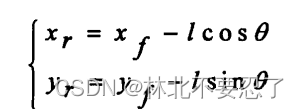
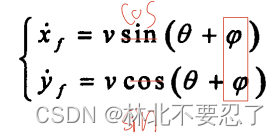
而前轴中心点和后轴中心点的位置关系为:
对这两个式子求导可得:
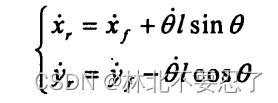
这里的求导从式子来看是对角度Θ求导,但这里应该是因为不知道式子该怎么写,并没有将链式求导展开到最后,可以看出xf和yf都是保持着一个没有展开的状态。将这个式子带去前面关于侧向偏移的式子中,可以得到:

在很短的时间间隔内,考虑前轮转向角不变,那么可以得到:
这个式子也是错的,cos和sin应该换过来,这个式子是错的,后面的推理居然还全是对的,看来作者一定很厉害。再将这个式子带入上式,可以得到:
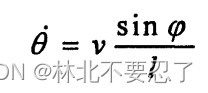
这个式子指出了角度的导数,再次往回带,可以得到:
积分可得:
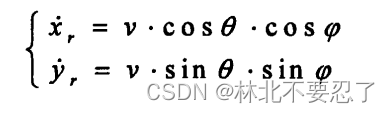
现在将全部式子回带并对时间积分,得到的就是后轴中心的运动轨迹方程:
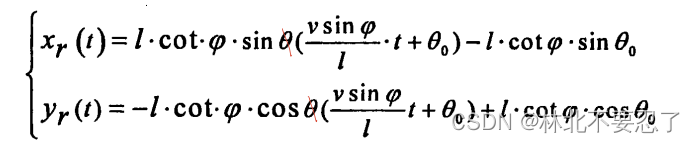
对于这个式子,首先cot后面多了个点,其次sin和cos后面多了个Θ,另外关于后面这个常数项,个人并不确定这里写这个常数项是否合理,时间t为零的时候后轴中心是否一定要在坐标原点,个人觉得这里并不一定,但是对于后续的推理貌似也没有什么太大影响,这里就不在深入。根据这两个式子,可以得到下面的轨迹:

这说明后轴中心实际上是绕着一个圆心在做圆周运动。利用同样的方法,我们可以得到其它点的运动方程,在低速和不考虑侧滑的情况下,车身上的任何一点的运动轨迹都是指向同一个圆心的圆,并且这个圆心至于转向角有关,与速度无关。这个推理主要是为了将汽车的运动轨迹简化为多段标准圆弧组成的序列。
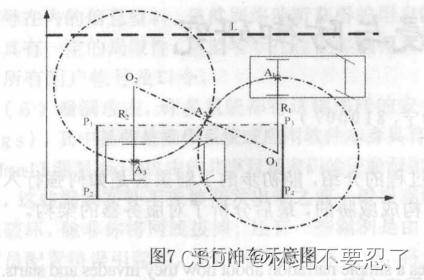
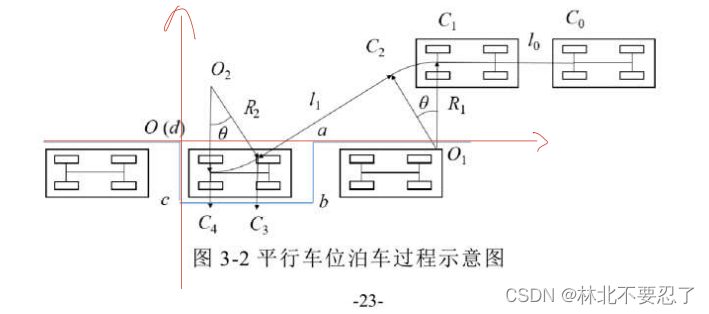
现在我们就可以将复杂的轨迹化简为单纯的圆弧,那么侧方停车的过程就可以简化为下图所示的情况:
在这篇论文中,对侧方停车的抽象稍微简单一些,论文作者是将这个过程抽象为两个圆弧,其中第一段的半径是需要计算的,而第二段半径则是直接用了车辆的最小转弯半径,也就是方向盘打满的情况下的转弯半径,根据几何关系,可以看出这个侧方位的过程实际上就是两个半径不同的圆弧的组合,而且转向角还一样,那么可以列出式子:
这组式子中有R1和α两个未知数,利用超声波传感器的数据带入计算可得到其结果,从而规划出转弯的过程。
对于侧方停车的过程,这篇论文提出了两个碰撞的可能。在泊车过程的第二段圆弧中,存在两个碰撞位置,一个是汽车的右后角可能会与车位的下沿碰撞,这个碰撞点主要是要比较第二段圆弧圆心位置与旋转半径的大小,另一个碰撞位置是车辆的右前角。关于这部分,后面第三篇论文会更加详细地记录一下,那一篇中这部分记录的比较清楚。
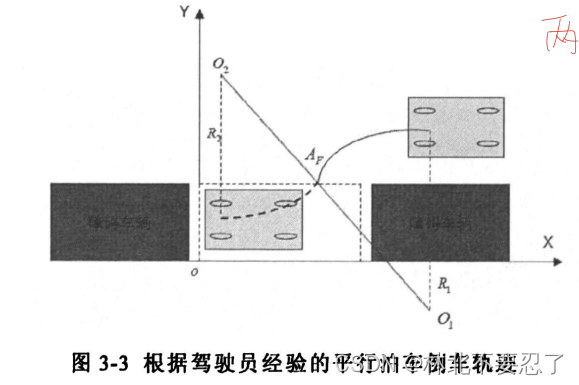
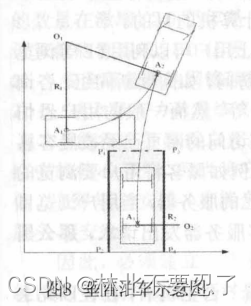
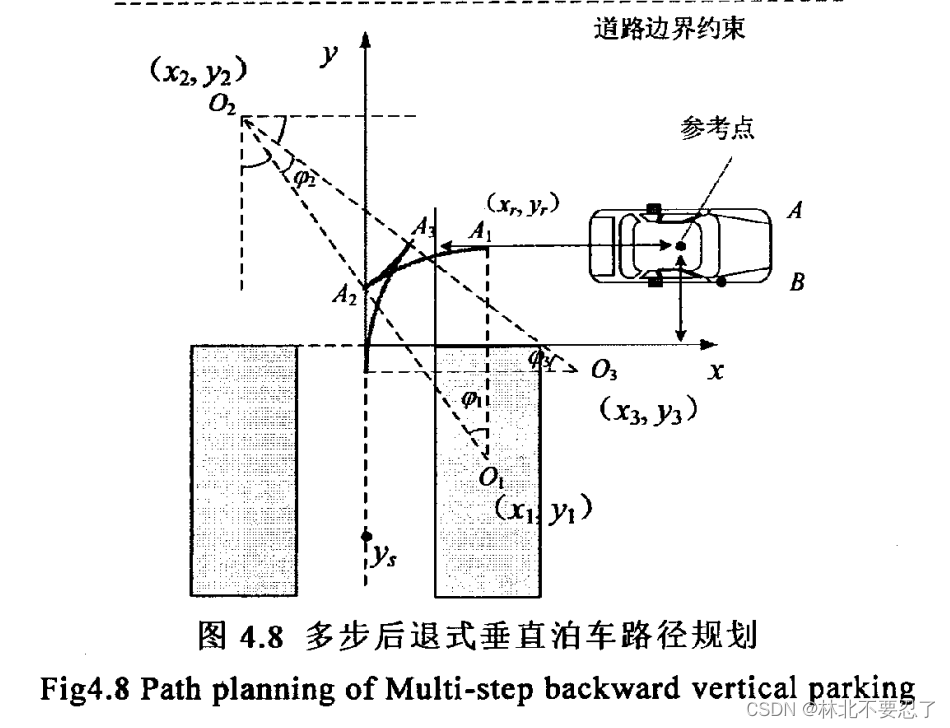
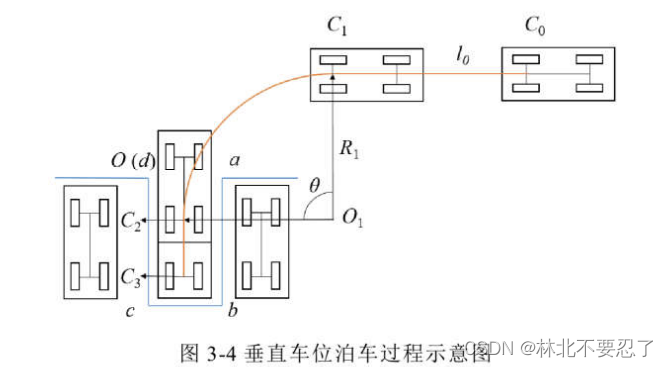
现在换到倒库的部分,对于这部分,路径规划就转换为了一个三点式的垂直泊车,也就是先利用圆弧,将车调整到与车位平行的状态,之后车辆直着倒入库中,从而实现倒库。论文中使用的图有问题,这里放一下我们修正过的示意图:
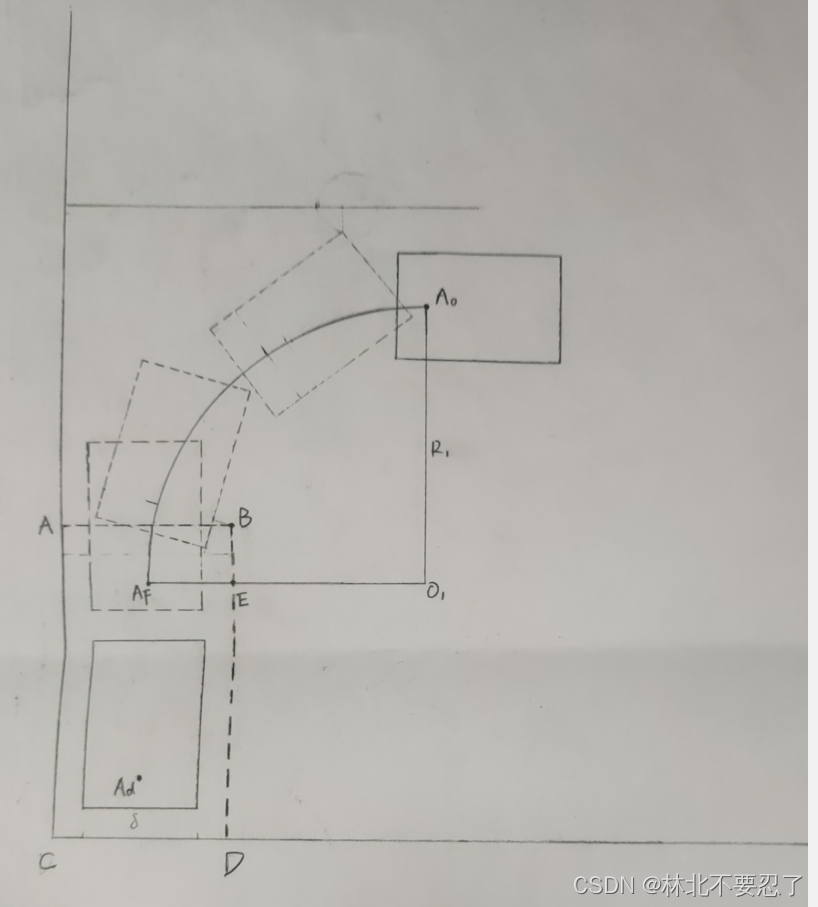
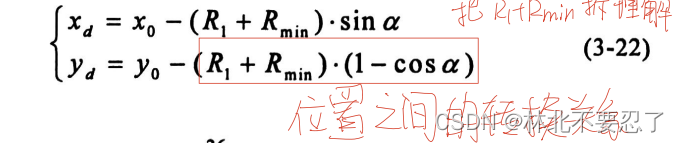
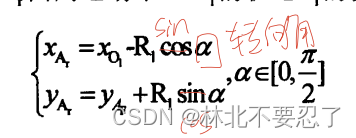
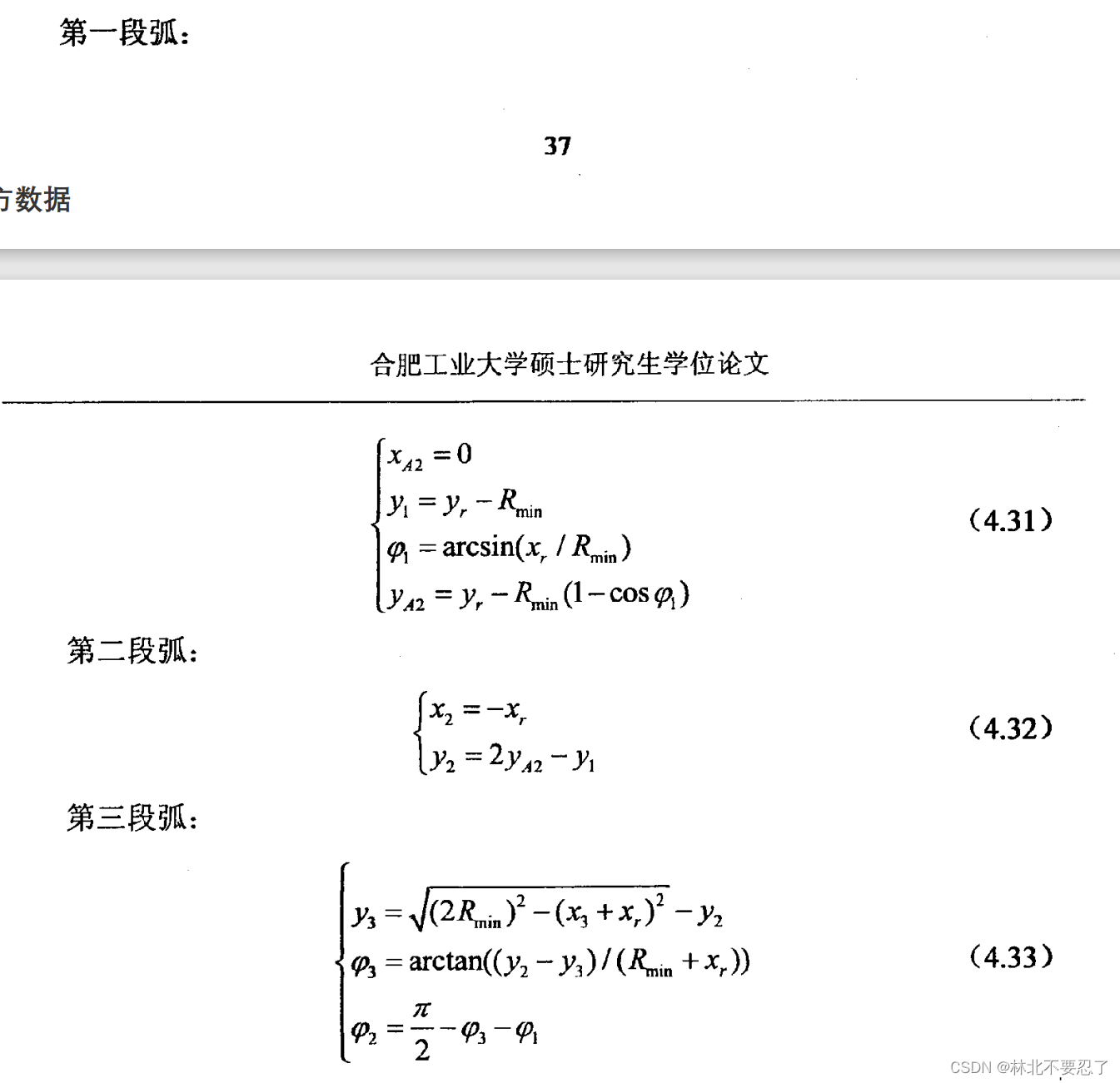
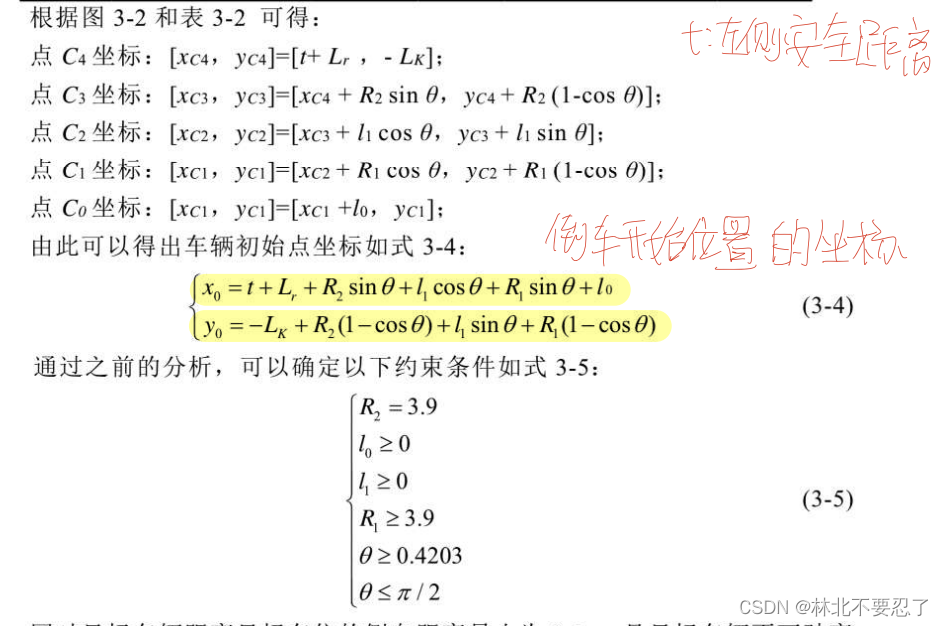
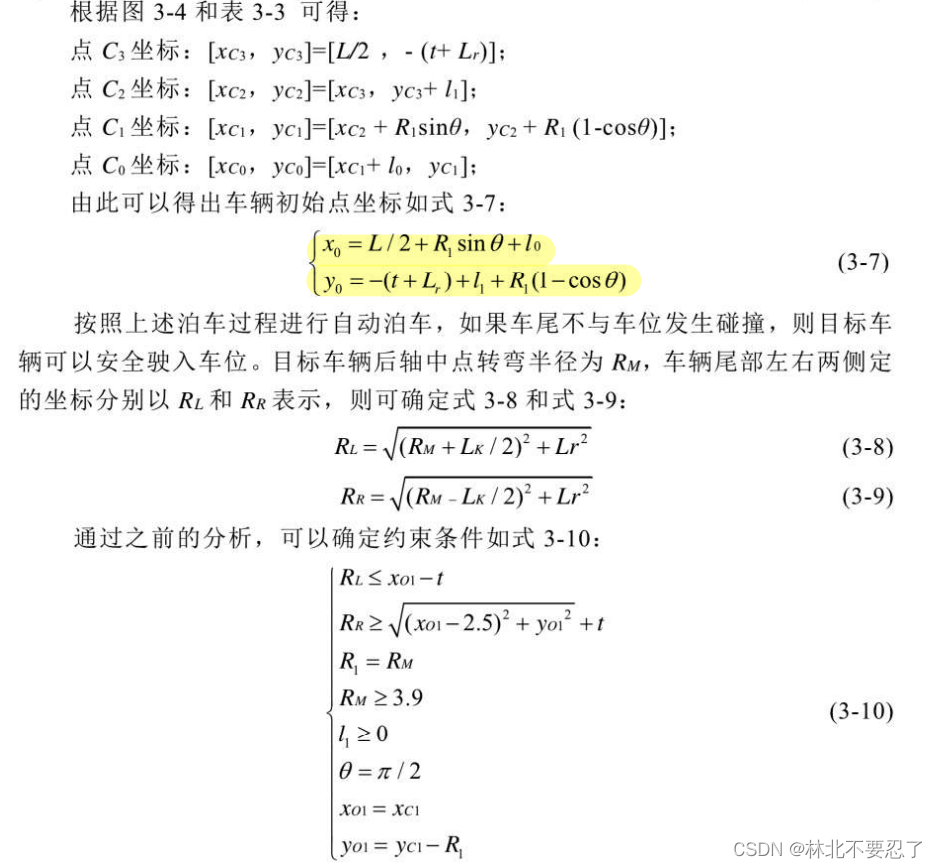
根据这个场景,可以写出泊车终点Ad的坐标:
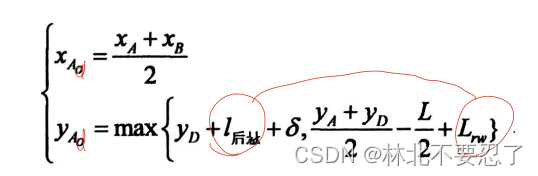
这是修改后的公式,论文不仅混淆了图中的起点和终点,而且同样的后悬长度用了两个符号去表示。利用直角三角形OBE,可以得到下面的式子:
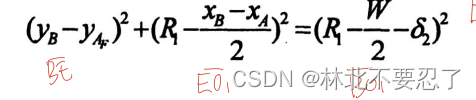
从而解出AF点:
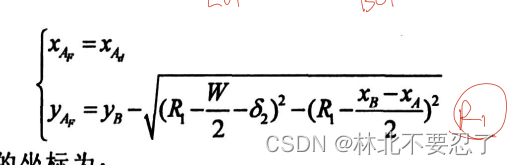
而圆心的坐标为:
由此可以得到后轴中心圆周运动的轨迹:
将传感器的示数传入,就可以计算出圆周运动的半径R1,从而得到倒车过程的轨迹。
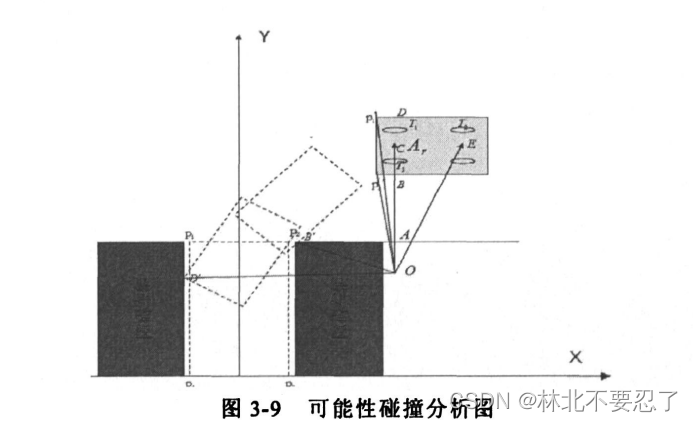
关于倒车过程中的碰撞分析,主要是有两种碰撞的可能,分别是车的左后角与车位的左侧边界碰撞或者车辆的右前轮中心与车位的右侧边界碰撞,如下图:
车左后角的碰撞分析,主要是因为在整个车的圆周运动过程中,这个点的旋转半径实际上是最大的,当这个点转到水平的时候,相当于达到了水平的极限范围,利用这个去进行比较,从而分析车的左后角是否会产生碰撞。这里直接放最后的结果,即圆心到右车轮延长线的距离要足够大:
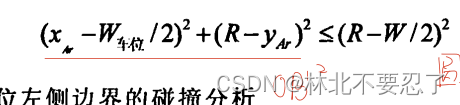
对于车辆的左侧边界实际上也是同样的分析方法,在圆周运动的过程中转弯半径最小的是右前轮中心点,所以要用这个点的半径去做对比,这里也直接放结论:
二、基于多传感器多路径规划自动泊车系统仿真及实车验证
这篇论文是某个期刊上的一篇文章,相对内容少了很多,这里简单记一下有用的部分。
在侧方停车的部分,这篇论文同样采用了画圆弧的方式,但是论文认为由于车的起始位置存在一定的差异,所以最好在其中增加一段直线的部分。
在倒库的部分,论文补充了另一种方法,先沿着一个圆弧前行,再沿着另一个圆弧倒行,从而倒入库中,但是这种方法相当于没有完全开过车位就进行了倒车,对于车位大小的估计需要提前进行,而且无法按照之前提到的估计方法进行,示意图如下:
三、基于EPS的自动泊车路径规划及跟踪控制研究
这篇论文同样是合工大的一篇硕士毕业论文,重复的部分就不再记录,主要还是对于两种倒车的模型的比较。
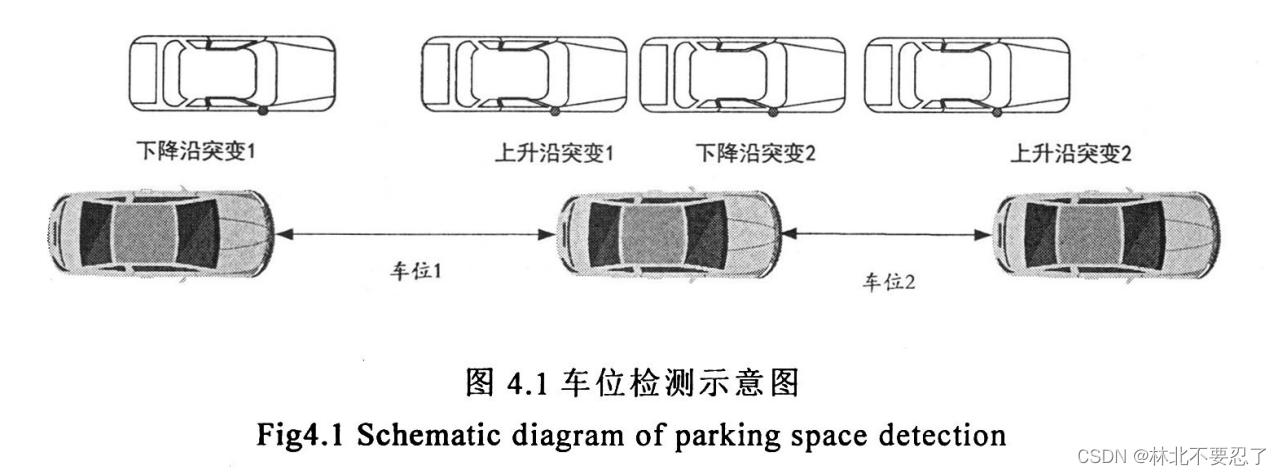
在车位检测的部分,这篇论文用信号的方式去描述了一下,如果深度突然加深,意味着出现了下降突变沿,深度突然减小对应着出现了上升突变沿,如下图所示:
为了防止探测过程中的外界干扰,需要对数据进行滤波处理,可以使用中值滤波、算数平均滤波、加权滤波以及限幅滤波等方法。
在路径规划的部分,依然是分为侧方位和倒车入库两部分。对于侧方位的部分,区别于前面那篇论文的思路,前面的论文的思路是用两端圆弧,圆弧的半径不同,第二段圆弧用最小转弯半径,而第一段圆弧的半径则需要计算,相当于根据横向纵向的位置关系,解一个含有两个未知数的方程组。
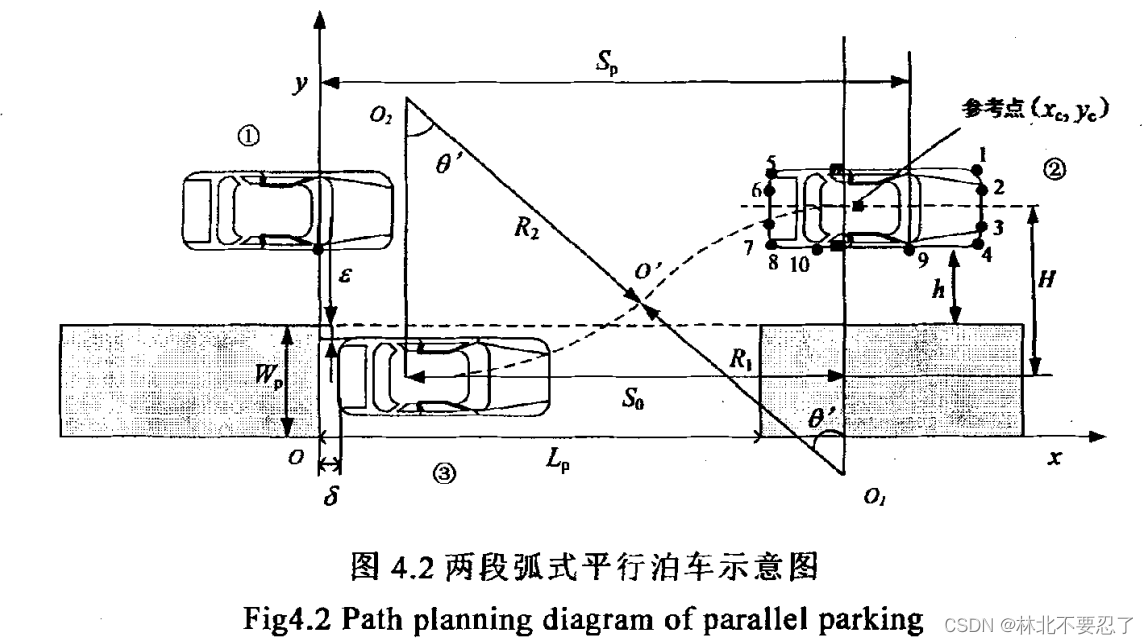
而这篇论文使用的方法,是将路径的规划抽象为两段圆弧和一段直线,如下图所示:

在这个模型中,两段圆弧的部分都采用了最小转弯半径,并且角度设置为了45°,那么对于整个过程而言,相当于需要求解的变量就只剩下中间的直线部分的长度,这个长度作为因变量,而论文推导的自变量为车下沿到车位侧边缘的距离h。
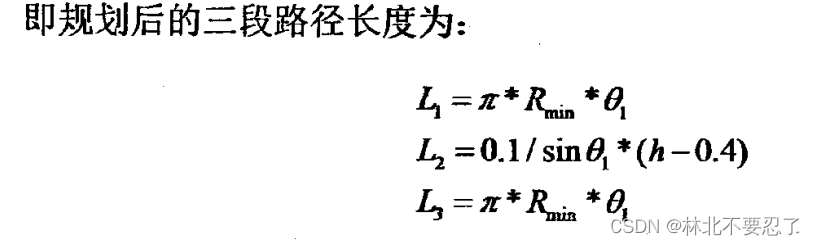
所以,根据这篇论文的推理,如果检测到车位大小合适,自变量就只剩下h一个,只要h在合理范围内,那么倒车的过程一定就不会出现碰撞,利用h确定L2的长度,从而确定整个运动的轨迹,公式如下图:
另外,关于h的合法范围,推理过程如下:
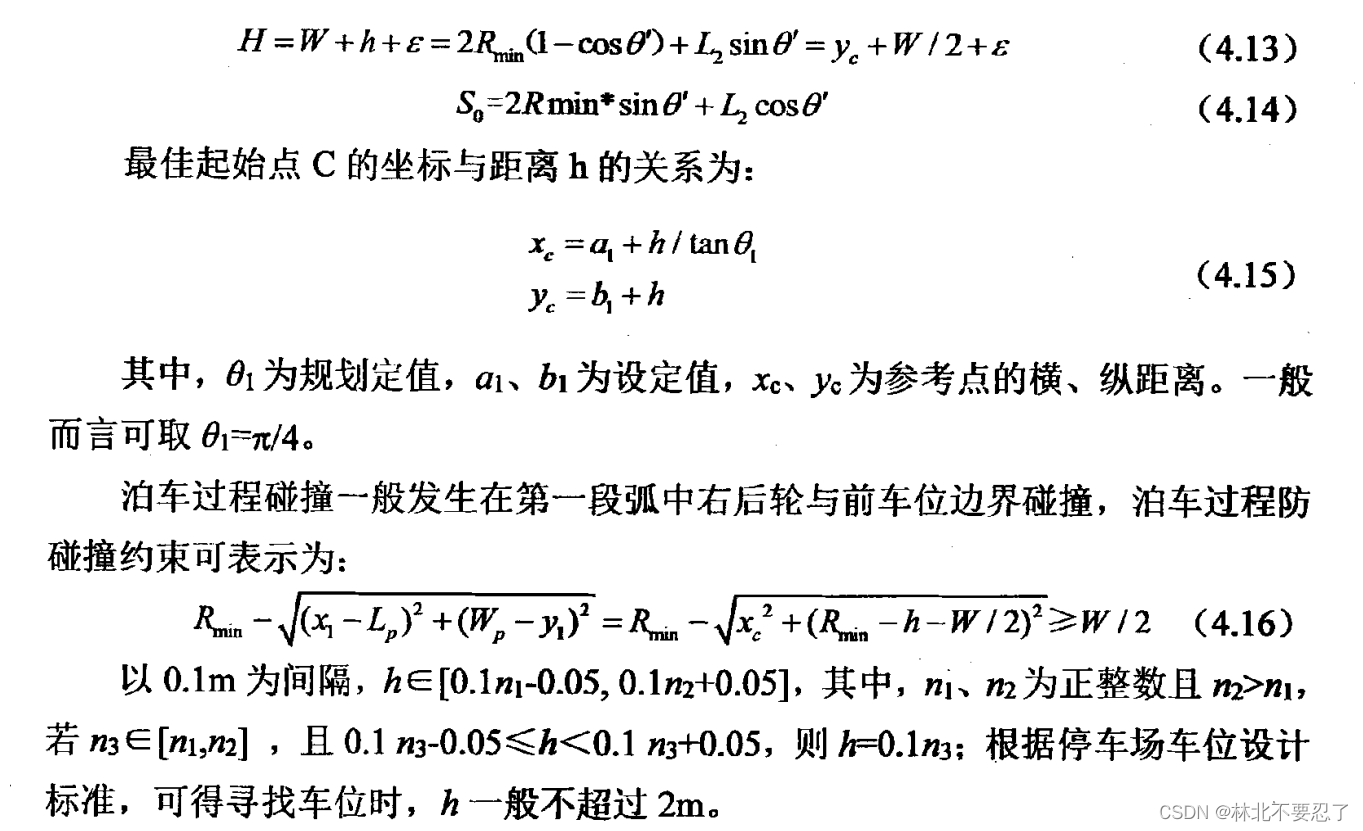
也就是说在这个模型下,只要车辆下沿到车位的距离小于2m,就可以根据模型规划出一条没有碰撞的三段式倒车路径。个人认为这个倒车的模型是更加靠谱的,因为这种方法更加符合现实中驾校教的侧方位倒车方法,先打满,到一定程度回正,再到一定程度向另一个方向打满,其中回正的部分对应的就是三段式路径中直线的部分。
而对于这种方法,不足之处在于只考虑了h的影响,所以整个的倒车过程实际上是与目标位置无关的,倒车结束后的位置是根据h来确定的,而不是根据前后的位置变化来确定倒车的参数,也就是说能倒进去,但是倒进去以后可能位置不在正中央或者有些偏,在这种情况下,需要一些调整策略来将车移动到更加好的位置上。
关于调整策略,主要还是让车在一定位置上再前向移动一段距离,从而让车在车位内尽可能地准确,这里只放一下论文的推理部分。
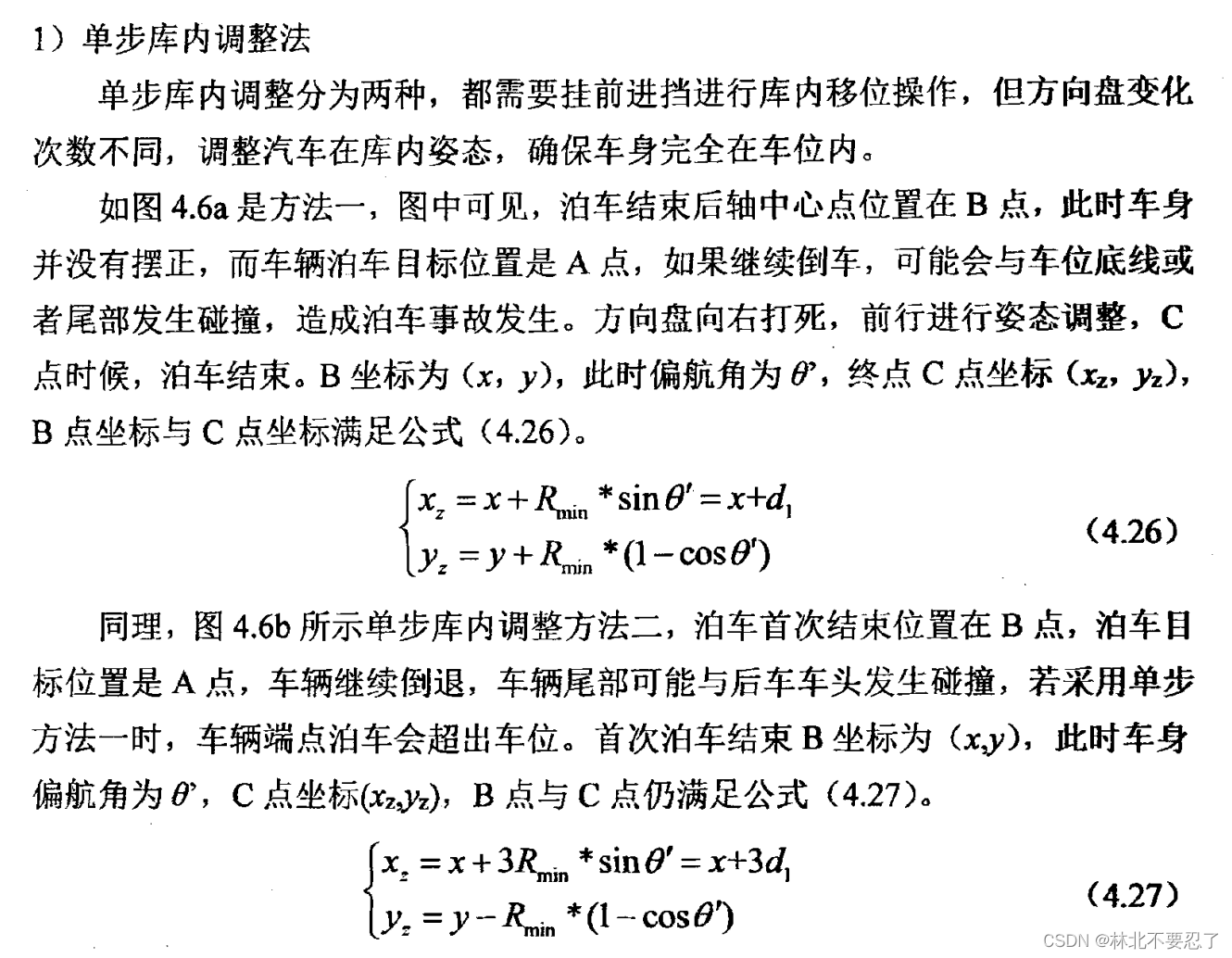
关于倒车入库的部分,论文直接就用了多段式的倒车方式,作者将倒车入库的过程拆分成了三部分,倒车-前向回正-再倒车,也就是说,对于一些起始坐标比较大而车位又比较小的情况,一步倒车会失效,在这种情况下,需要使用这种三步式的方法来补充修正,过程如下图:
其中满足的关系为:
四、自动泊车系统的路径规划及跟踪
这篇论文是哈工大的一篇硕士毕业论文,这篇论文相较于前面的三篇,关键在于提出了一个泊车起始区域的概念。
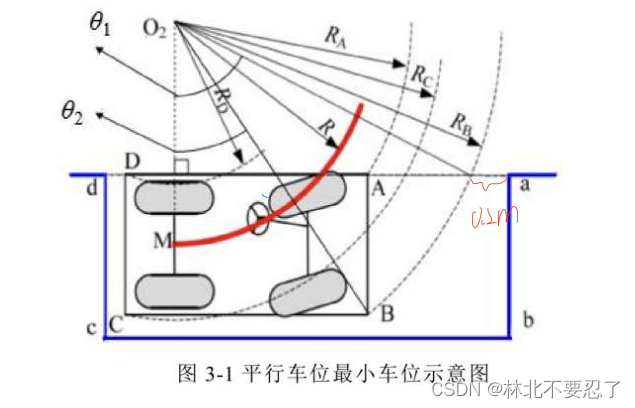
首先对于车位的检测还是一成不变地开过然后检测超声波数据,之后在路径规划的部分,论文首先计算了车位的合法大小,这里论文认为倒库时的法律规定的车位大小是足够满足倒车需求的,但是在侧方停车时,车位的长度不一定满足倒车需求,将侧方停车的过程倒过来考虑,只要在驶出车位的时候,车辆的右前顶点B不发生碰撞,那么这个车位也就足够长,如下图所示:
如果取车位的水平安全距离为t=0.2,那么可以列出下面的式子:

带入数据计算可得侧方停车的最小车位的长度应该为6.6米,这种情况下汽车的状态为点B刚好处在纵坐标为0的状态,据此可以算出转过的角度:
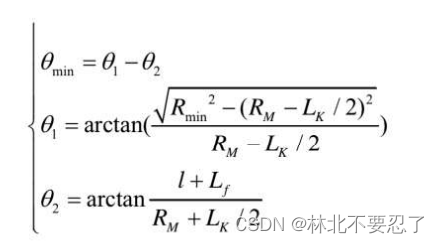
也就是说,我们可以根据车辆的参数,直接算出将B移动到纵坐标为0的状态需要转向多少度,在这个过程中,只要B不发生碰撞,那么倒车的第三段过程就不会发生碰撞。
在此基础上,扩展到整个的侧方停车的过程,建立如下图所示的坐标系:
对整个过程进行描述,可以得到下面的式子:
对这些式子而言,它们代表了车辆起始位置的可行范围,也就是说只要坐标符合3-5式的约束条件,那么按照论文的两端圆弧加一条直线的组合,就一定可以解出一个符合条件的路径,将车辆倒进去。带入数据计算,可以得到下图所示的可行区域:

根据这个区域,我们甚至可以忽略前面的l0,让车辆横向行驶到边界位置时开始倒车,利用横向和纵向的距离约束,计算出转向角和直线行驶的长度,从而完成路径的规划。
但是对于这篇论文而言,这篇论文的后面路径规划的部分是用了曲线拟合的方法,由于曲线拟合要比这种组合路径对车位要求更高,所以在计算时将车位增大了0.3m,由于这种方式对于我们参加的比赛没有太大的参考价值,这里不再记录。
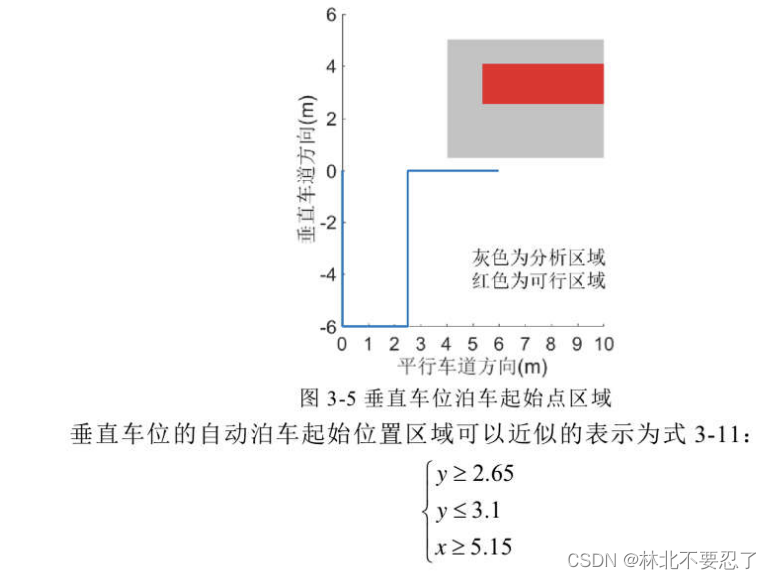
倒车入库的思路是一样的,利用关系解出坐标的起始范围,过程如下:


















 2530
2530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











