






 本文介绍了核方法在处理非线性关系中的应用,包括核化的岭回归和支持向量机,以及如何利用核技巧进行高效的计算。同时,文章还探讨了几种重要的降维技术,如主成分分析(PCA)和核主成分分析(KPCA)。
本文介绍了核方法在处理非线性关系中的应用,包括核化的岭回归和支持向量机,以及如何利用核技巧进行高效的计算。同时,文章还探讨了几种重要的降维技术,如主成分分析(PCA)和核主成分分析(KPCA)。
文章目录
核方法
将给定的数据嵌入到一个空间中,在该空间中可以将模式发现为线性关系。
两个步骤:
- 映射 由 所谓的核函数 (kernel function) 隐式定义 (取决于有关数据源模式的领域知识 domain knowledge regarding pattern in data source)。
- 使用健壮的通用算法。
算法高效,且需要 在数据项的大小和数量上是多项式的 计算资源,嵌入空间 (embedding space) 的维度呈指数增长,不影响计算负担。
函数
ϕ
\phi
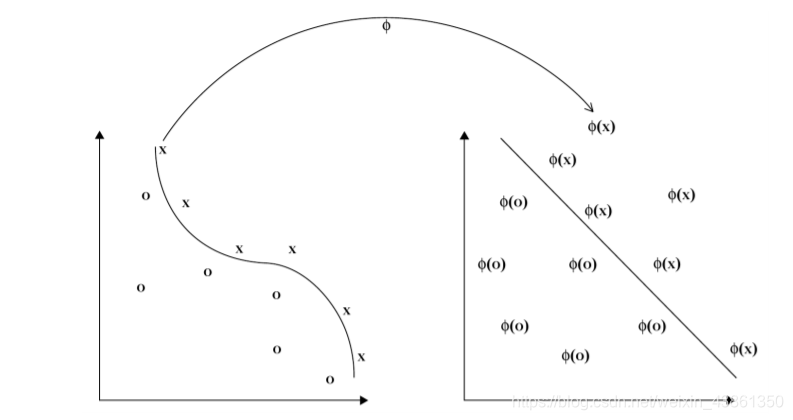
ϕ 将数据 嵌入到 特征空间中,非线性模式 现在以 线性模式 出现。
线性回归回顾
前面的推导过程详见另一篇文章
线性回归
最终,预测机的输出是权重和新的特征向量的内积
g
(
x
)
=
<
W
,
x
>
g(x) = <W, x>
g(x)=<W,x>
对于可逆的
X
X
T
XX^T
XXT,我们能将
W
W
W 写为:
W
=
(
X
X
T
)
−
1
X
Y
=
X
X
T
(
X
X
T
)
−
2
X
Y
=
X
α
W=(XX^T)^{-1}XY=XX^T(XX^T)^{-2}XY=X\alpha
W=(XXT)−1XY=XXT(XXT)−2XY=Xα
W
=
∑
i
=
1
m
x
i
α
i
W = \sum_{i=1}^mx_i\alpha_i
W=i=1∑mxiαi
其是训练数据的线性组合。
解权重向量的两种表示:
- W = ( X X T ) − 1 X Y W = (XX^T)^{-1}XY W=(XXT)−1XY 原始形式 (primal form)
- W = X α W = X\alpha W=Xα 对偶形式 (dual form)
若 X X T XX^T XXT是非可逆的,我们可能通过要求权重的 二范数 (2-norm) 很小, 使用 伪逆 (pseudo-inverse) 或 正则化 (regularize) 初始问题 ,如 最小化 ∣ ∣ W ∣ ∣ 2 ||W||^2 ∣∣W∣∣2
岭回归回顾
前面的推导过程详见另一篇文章
岭回归
其中
W
=
(
X
X
T
+
λ
I
)
−
1
X
Y
W=(XX^T+\lambda I)^{-1}XY
W=(XXT+λI)−1XY
可以被类似于普通回归的做法,写为:
W
=
X
α
W=X\alpha
W=Xα
其中
α
\alpha
α 是:
(
G
+
λ
I
)
−
1
Y
(G+\lambda I)^{-1}Y
(G+λI)−1Y
而
G
=
X
T
X
G=X^TX
G=XTX被称为 格拉姆矩阵 (Gram matrix)。每一个
G
G
G 的元素都是一个内积,
<
x
i
,
x
j
>
<x_i, x_j>
<xi,xj>,使得:
G
i
,
j
=
<
x
i
,
x
j
>
G_{i, j} = <x_i, x_j>
Gi,j=<xi,xj>
其预测函数是:

与普通回归一样,我们有两种形式的岭回归解:
- W = ( X X T + λ I ) − 1 X Y W = (XX^T + \lambda I)^{-1}XY W=(XXT+λI)−1XY 原始形式 (primal form)
- W = X α W = X\alpha W=Xα 对偶形式 (dual form)
原始形式显式计算,而 对偶形式 表示为训练样本的线性组合。
在原始形式中,我们求解 ( N × N ) (N × N) (N×N) 方程组,而在 对偶形式 中,我们求解 ( m × m ) (m × m) (m×m) 系统。
若 特征维度 N ≫ m N \gg m N≫m (样本数),计算优势就很明显了。
关键观察:岭回归算法 可以 以只需要样本点之间的内积的形式 求解。
内核定义的非线性映射 (Kernel-defined nonlinear mapping)
线性回归中的假设是特征 (自变量) 和预测结果变量 (因变量) 之间的关系是线性的,那如果不是呢?
好的策略是将特征映射到允许关系为线性的新特征空间,然后应用岭回归。
类似地,我们可以对用于分类的线性判别式 (linear discriminant) 做同样的事情
考虑一个嵌入映射:

选择映射
ϕ
\phi
ϕ 使其旨在将非线性关系转换为线性关系。
映射 ϕ \phi ϕ 将给定的数据集 S S S 重新编码为 { ( ϕ ( x i ) , y i ) , . . . , ( ϕ ( x m ) , y m ) } \{(\phi(x_i), y_i), ..., (\phi(x_m), y_m)\} {(ϕ(xi),yi),...,(ϕ(xm),ym)},这代表了数据集中的 M M M 个样本。
回想一下,岭回归解的有效 对偶形式(dual form) 需要由内积组成的 Gram 矩阵。
G
i
,
j
=
<
ϕ
(
x
i
)
,
ϕ
(
x
j
)
>
G_{i, j} = <\phi(x_i), \phi(x_j)>
Gi,j=<ϕ(xi),ϕ(xj)>
α \alpha α 的计算复杂度 为 O ( m 3 + m 2 N ) O(m^3 + m^2N) O(m3+m2N) 以及 让预测机估算一个新样本的复杂度为 O ( m N ) O(mN) O(mN)
事实证明,内积可以直接在输入空间中计算,而不是首先使用核函数计算 φ ( x ) φ(x) φ(x)。
定义: 一个核 是一个函数,
k
k
k,其对于所有
x
,
z
∈
S
x, z \in S
x,z∈S 满足:
k
(
x
,
z
)
=
<
ϕ
(
x
)
,
ϕ
(
z
)
>
k(x, z) = <\phi(x), \phi(z)>
k(x,z)=<ϕ(x),ϕ(z)>
其中
ϕ
\phi
ϕ 是从
S
S
S 到 一个内积特征空间
F
F
F 的映射。

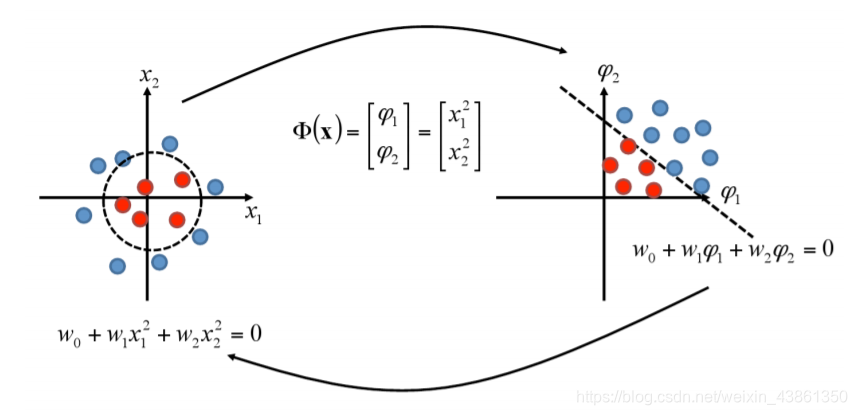
例子
考虑一个二维输入空间
x
⊆
R
2
x \subseteq \R^2
x⊆R2 以及 特征映射:

F
F
F 中的线性函数假设就以以下形式存在:
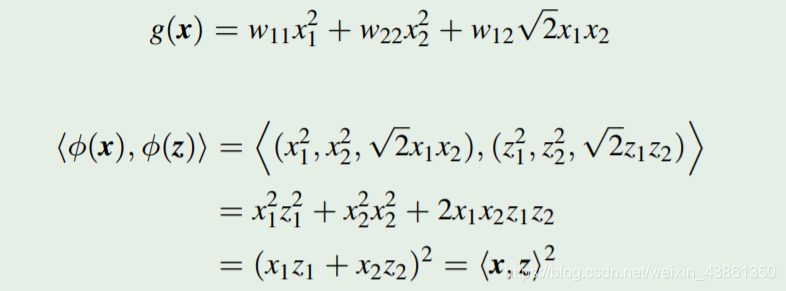
因此,
k
(
x
,
z
)
=
<
x
,
z
>
2
k(x, z) = <x, z>^2
k(x,z)=<x,z>2 是一个核函数,
F
F
F 是对应的特征空间。
另一个例子
考虑一个二维输入空间
x
⊆
R
2
x \subseteq \R^2
x⊆R2 以及 特征映射:
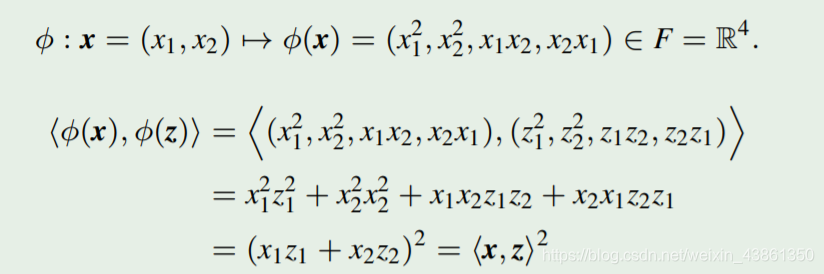
同一个内核 计算 这个特征空间的内积。
因此特征空间 不是由 核函数 唯一确定的。
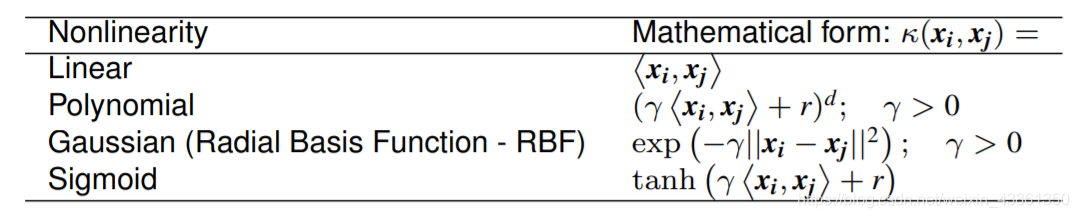
下图展现了常用的核函数 (
γ
,
r
,
d
\gamma, r, d
γ,r,d 都是参数)
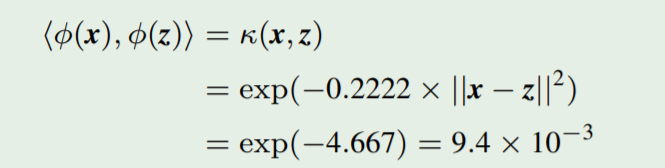
另一个例子:
使
x
=
[
1
4
6
]
T
x = [1 \space\space 4 \space\space 6]^T
x=[1 4 6]T 以及
z
=
[
3
5
2
]
T
z = [3 \space\space 5 \space\space 2]^T
z=[3 5 2]T 作为我们需要通过映射函数
ϕ
(
.
)
\phi(.)
ϕ(.) 映射到一些特征空间
F
F
F 的两个特征向量。让我们考虑使用 和 RBF 特征空间有关的参数为
γ
=
0.2222
\gamma=0.2222
γ=0.2222 的核函数。两个向量的内积的值为
<
ϕ
(
x
)
,
ϕ
(
z
)
>
<\phi(x), \phi(z)>
<ϕ(x),ϕ(z)>,我们需要计算
k
(
x
,
z
)
=
e
x
p
(
−
γ
∣
∣
x
−
z
∣
∣
2
)
k(x, z) = exp(-\gamma||x-z||^2)
k(x,z)=exp(−γ∣∣x−z∣∣2)
岭回归的核
回到岭回归的公式中,我们能发现出现在岭回归解中的 Gram 矩阵的每一项都是输入空间中数据的内积。
映射
φ
(
⋅
)
φ(·)
φ(⋅) 到高维特征空间
F
F
F,意味着可以使用特征空间的适当内核计算 Gram 矩阵的每个条目。
G i , j = < ϕ ( x i ) , ϕ ( x j ) > = k ( x i , x j ) G_{i, j} = <\phi(x_i), \phi(x_j)> = k(x_i, x_j) Gi,j=<ϕ(xi),ϕ(xj)>=k(xi,xj)
核化 (kernalization) 提供了一种处理问题中可能存在的非线性关系的方法(例如回归、分类、降维等)
支持向量机 (Support Vector Machine)
考虑一个有数据
x
i
(
i
=
1
,
.
.
.
,
m
)
x_i(i = 1, ..., m)
xi(i=1,...,m) 并拥有 对应标签
y
i
=
±
1
y_i = \pm 1
yi=±1 的二分类任务,其决策函数为:
g
(
x
)
=
s
i
g
n
(
<
w
,
x
>
+
b
)
g(x) = sign(<w, x> + b)
g(x)=sign(<w,x>+b)
对于可分离的数据集,若 ∀ i , y i ( < w , x > + b ) > 0 \forall i , y_i(<w, x> + b) \gt 0 ∀i,yi(<w,x>+b)>0, 所有数据都将被正确分类。
定义规范超平面 (canonical hyperplane),使得 < w , x > + b = 1 <w, x> + b = 1 <w,x>+b=1 表示分离平面一侧的最近点,而 < w , x > + b = − 1 <w, x> + b = -1 <w,x>+b=−1 表示另外一侧的最近点。
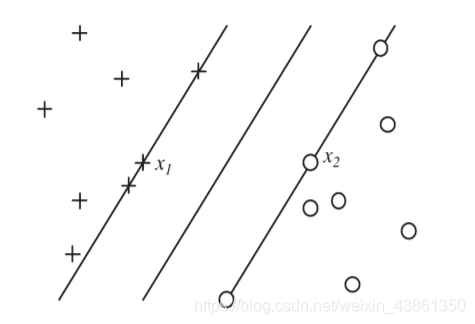
上图是 SVM 的分离平面
分离平面 (seperating plane): < w , x > + b = 0 <w, x> + b = 0 <w,x>+b=0 以及 法向量 w ∣ ∣ w ∣ ∣ \frac{w}{||w||} ∣∣w∣∣w
边距 (margin) 由 x 1 − x 2 x_1 - x_2 x1−x2 在分离平面上的投影给出。
< w , x 1 > + b = 1 <w, x_1> + b = 1 <w,x1>+b=1 以及 < w , x 2 > + b = − 1 <w, x_2> + b = -1 <w,x2>+b=−1, 边距为 γ = 1 / ∣ ∣ w ∣ ∣ \gamma = 1/||w|| γ=1/∣∣w∣∣
我们通过最小化
m
i
n
[
1
2
∣
∣
w
∣
∣
2
]
min[\frac{1}{2}||w||^2]
min[21∣∣w∣∣2]
其中
∀
i
,
y
i
(
<
w
,
x
>
+
b
)
≥
1
\forall i , y_i(<w, x> + b) \ge 1
∀i,yi(<w,x>+b)≥1
能最大化边距 γ = 1 / ∣ ∣ w ∣ ∣ \gamma = 1/||w|| γ=1/∣∣w∣∣
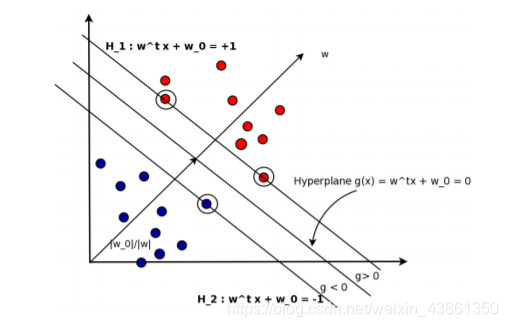
上图是 SVM 分离平面的细节
学习任务简化为最小化 原始目标函数 (primal objective function):
L
=
1
2
(
<
w
,
w
>
)
−
∑
i
=
1
m
α
i
(
y
i
(
<
w
,
x
i
>
+
b
)
−
1
)
L = \frac{1}{2}(<w, w>) - \sum_{i=1}^m\alpha_i(y_i(<w, x_i> + b) - 1)
L=21(<w,w>)−i=1∑mαi(yi(<w,xi>+b)−1)
其中
α
i
\alpha_i
αi 是拉格朗日乘数 (Lagrange multipliers) 以及
α
i
≥
0
\alpha_i \ge 0
αi≥0
在对
b
b
b 和
w
w
w 取导数并适当代入上式之后,我们能得到 对偶目标函数 (dual objective function)。
W
(
α
)
=
∑
i
=
1
m
α
i
−
1
2
∑
i
,
j
=
1
m
α
i
α
j
y
i
y
j
<
x
i
,
x
j
>
W(\alpha) = \sum_{i = 1}^m \alpha_i - \frac{1}{2} \sum_{i, j= 1}^m \alpha_i \alpha_j y_i y_j <x_i, x_j>
W(α)=i=1∑mαi−21i,j=1∑mαiαjyiyj<xi,xj>
该式要相对于受下述条件约束的
α
i
\alpha_i
αi 最大化:
α
i
≥
0
,
∑
i
=
1
m
α
i
y
i
=
0
\alpha_i \ge 0, \space\space\space \sum_{i=1}^m\alpha_i y_i = 0
αi≥0, i=1∑mαiyi=0
由上式表示的二次程序 (quadratic program) 给出了具有最大边距 (maximal margin) 的可分离数据的最佳分离超平面 (optimal seperating hyperplane)。
上式指示了我们可以在不可分数据 (inseparable data) 的情况下,通过应用 映射 ϕ ( . ) \phi(.) ϕ(.),可以将 计算内积 的内核合并到特征空间中。
映射通过下述实现:

请注意,我们不需要知道
φ
(
x
i
)
φ(x_i)
φ(xi) 的函数形式,因为内核的选择隐含地定义了它:
k
(
x
i
,
x
j
)
=
<
ϕ
(
x
i
)
,
ϕ
(
x
j
)
>
k(x_i, x_j) = <\phi(x_i), \phi(x_j)>
k(xi,xj)=<ϕ(xi),ϕ(xj)>
因此,之前的SVM对偶目标函数的内核版本就是:
W
(
α
)
=
∑
i
=
1
m
α
i
−
1
2
∑
i
,
j
=
1
m
α
i
α
j
y
i
y
j
k
(
x
i
,
x
j
)
W(\alpha) = \sum_{i = 1}^m \alpha_i - \frac{1}{2} \sum_{i, j= 1}^m \alpha_i \alpha_j y_i y_j k(x_i, x_j)
W(α)=i=1∑mαi−21i,j=1∑mαiαjyiyjk(xi,xj)
该式要相对于受下述条件约束的
α
i
\alpha_i
αi 最大化:
α
i
≥
0
,
∑
i
=
1
m
α
i
y
i
=
0
\alpha_i \ge 0, \space\space\space \sum_{i=1}^m\alpha_i y_i = 0
αi≥0, i=1∑mαiyi=0
比如,内核可以被选择为 k ( x i , x j ) = e x p ( − γ ∣ ∣ x i − x j ∣ ∣ 2 ) k(x_i, x_j) = exp(-\gamma||x_i - x_j||^2) k(xi,xj)=exp(−γ∣∣xi−xj∣∣2)
对于新的测试数据
z
z
z,决策函数变成:
f
(
z
)
=
s
i
g
n
(
∑
i
=
1
m
y
i
α
i
k
(
x
i
,
z
)
+
b
)
f(z) = sign(\sum_{i=1}^my_i\alpha_ik(x_i,z)+b)
f(z)=sign(i=1∑myiαik(xi,z)+b)
软边距 (Soft Margin)
噪点 (noisy) 和离群值 (outliers) 会导致 模型 不好的泛化能力。
SVM 通过 引入 软边距 来减少它们的影响。
W
(
α
)
=
∑
i
=
1
m
α
i
−
1
2
∑
i
,
j
=
1
m
α
i
α
j
y
i
y
j
k
(
x
i
,
x
j
)
W(\alpha) = \sum_{i = 1}^m \alpha_i - \frac{1}{2} \sum_{i, j= 1}^m \alpha_i \alpha_j y_i y_j k(x_i, x_j)
W(α)=i=1∑mαi−21i,j=1∑mαiαjyiyjk(xi,xj)
该式要相对于受下述条件约束的
α
i
\alpha_i
αi 最大化:
α
i
≥
0
,
∑
i
=
1
m
α
i
y
i
=
0
\alpha_i \ge 0, \space\space\space \sum_{i=1}^m\alpha_i y_i = 0
αi≥0, i=1∑mαiyi=0
两种计算噪点和离群值的方式:
- 使用 L 1 L_1 L1 范数误差 并 在上式引入 框约束(box constrain) 0 ≤ α i ≤ C 0 \le \alpha_i \le C 0≤αi≤C
- 使用 L 2 L_2 L2 范数误差 并在 上式 核矩阵 k ( x i , x j ) k(x_i, x_j) k(xi,xj) 的 前导对角线 (leading diagonal) 上添加一个小的正 常量(small positive constant) 使其变成 k ( x i , x j ) + λ k(x_i, x_j) + \lambda k(xi,xj)+λ
通过选择 参数 C C C 和 λ λ λ 来权衡训练 误差和泛化能力,我们可以使用验证集实现这一点。
关键
通过考虑基于内核的公式 (kernel-based formulation),可以使所有线性模型处理非线性。
可以在输入空间中 执行特征空间中的内积 的内核技巧 (kernel trick) 使得处理高维 成为可能。
由于 内核技巧 (kernel trick),结果证明我们不需要知道映射 ϕ ( . ) \phi(.) ϕ(.) 的形式,只要我们知道对应于特征空间的核函数 k ( . , . ) k(.,.) k(.,.)。
有许多内核可被用于内核化,内核也可以从数据中被学习。也可以在同一个公式中使用多个内核。
降维方法 (Dimensionality Reduction)
数据可能具有大量特征,通常需要降低其维度,或找到保留其某些属性的低维表示 (lower-dimensional representation)。
为什么需要降维 (或流形学习 manifold learning):
- 计算 (computational): 压缩初始数据作为预处理以加快后续操作。
- 可视化 (visualization): 通过将原始数据映射到二维或三维空间,将数据可视化以进行探索性分析 (exploratory analysis),这使得可视化更容易。
- 特征提取 (feature extraction): 生成更小的,更有效或有用的特征集。
主成分分析 (Principle Component Analysis - PCA)
在之前,我们了解了 可以通过一种 Ridge 正则化方式 (ridge regularization) 对特征进行加权,或我们可以通过 Lasso 正则化方式 (lasso regularization) 来选择重要特征。
假设我们想要减少用于表示被建模对象的特征数量,或者,假设我们想要找到一种保留原始数据某种属性的低维表示。
在主成分分析 (PCA) 的公式中,我们可以从中发现 最大化数据方差 (maximize the variance of the data) 的新维度。
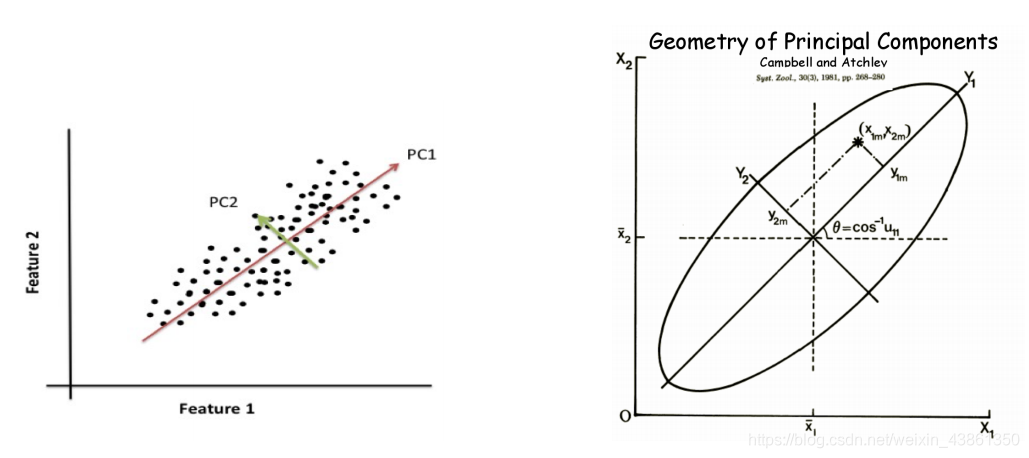
上图表示 主成分的几何。
为什么我们需要最大化方差?
信噪比 (signal-to-noise ratio SNR) 衡量 信号强度 相对于 噪声强度 的大小。
S
N
R
=
σ
s
2
σ
N
2
SNR = \frac{\sigma_s^2}{\sigma_N^2}
SNR=σN2σs2
因此最大化信号的方差是有意义的,协方差用于两个或多个特征。
如果上图中所示的二维数据层中 (即去除了平均值),我们在二维中 拟合高斯 (Gaussian),沿 P C 1 PC1 PC1 轴的高斯将具有更大的方差。因此,选择使方差最大化的轴是有意义的。
考虑 m m m 个数据样本 S = { x 1 , . . . , x m } S=\{x_1, ..., x_m\} S={x1,...,xm},一个特征映射 Φ : X → R N \Phi:X\to \R^N Φ:X→RN
数据矩阵 X ∈ R N × m X \in \R^{N \times m} X∈RN×m,以及定义 { Φ ( x 1 ) , . . . , Φ ( x m ) } \{\Phi(x_1), ..., \Phi(x_m)\} {Φ(x1),...,Φ(xm)}
第 i i i 个数据被表示为 x i = Φ ( x i ) x_i = \Phi(x_i) xi=Φ(xi),也就是 X X X 矩阵 的第 i i i 列,这是一个 N N N 维向量。
降维技巧旨在找到 k ≪ N k \ll N k≪N,即数据的 k k k 维表示, Y ∈ R k × m Y \in \R^{k \times m} Y∈Rk×m,其在某种程度忠于原始表示 X X X。
让 k ∈ [ 1 , N ] k \in [1, N] k∈[1,N], X X X 作为一个 以均值为中心 (mean-centred) 的矩阵。
使 P k P_k Pk 是一组 k k k 维 k秩正交投影矩阵 (rank-k orthogonal projection matrices)
投影矩阵 与 线性向量空间 R N \R^N RN 的子空间 R k < N \R^{k \lt N} Rk<N 相关联,并且具有以下属性,它们是唯一的方阵,可将向量空间中的任何向量 x x x 投影到子空间中。
PCA 包括将 N N N 维数据投影到 k k k 维线性子空间中,以最小化重构误差,重构误差是原始数据和投影数据之间 L 2 L_2 L2 距离的平方。
问题就变成了:
对于上式的优化问题,可以证明若 P ∗ P^* P∗ 是最优正交投影矩阵,则其形式为 P ∗ = u k u k T P^*=u_ku_k^T P∗=ukukT
U k ∈ R N × k U_k \in \R^{N \times k} Uk∈RN×k 是 由 前 k 个奇异向量 C = 1 m X X T C = \frac{1}{m} XX^T C=m1XXT 组成的矩阵,样本协方差和 X X X 相关。
X X X 的 k k k 维表示 从 Y = U T X Y = U^TX Y=UTX 得来。
通过协方差的定义, C C C 的 顶部奇异向量 (top singular vectors) 是数据中方差最大的方向。
其相关的奇异值等于方差。
PCA 投影到最大方差的子空间。
请注意 (无需证明) 对于任意 实矩阵
A
∈
R
m
×
n
A ∈ R^{m×n}
A∈Rm×n,其奇异值分解 (SVD) 是这样的,存在:
核主成分分析 (Kernel Principle Component Analysis)
之前考虑的映射 Φ ( . ) \Phi(.) Φ(.) 将被映射到任意 复现内核 (reproducing kernel) 希尔伯特空间 (Hilbert space ( R K H S ) 2 (RKHS)^2 (RKHS)2) 的特征替换,我们只需要使用 于希尔伯特空间 对应的核函数 k k k 。
我们需要展示 协方差矩阵 C = 1 m X X T C=\frac{1}{m}XX^T C=m1XXT 的 SVD 分解 以及 核矩阵 K = X T X K = X^TX K=XTX 之间的关系。
复现内核希尔伯特空间
使得
K
:
X
×
X
→
R
K: X \times X \to R
K:X×X→R 作为 正定对称 (positive definite symmetric - PDS) 核。存在一个 希尔伯特空间
H
H
H 以及 一个能将
X
X
X 转为
H
H
H 的 映射
Φ
\Phi
Φ,使得:
∀
x
,
x
′
∈
X
,
K
(
x
,
x
′
)
=
<
Φ
(
x
)
,
Φ
(
x
′
)
>
\forall x, x^{'} \in X, K(x, x^{'}) = <\Phi(x), \Phi(x^{'})>
∀x,x′∈X,K(x,x′)=<Φ(x),Φ(x′)>
此外,
H
H
H 还拥有以下属性,这被称为复现属性 (producing property)。
∀
h
∈
H
,
a
n
d
∀
x
∈
X
,
h
(
x
)
=
<
h
,
K
(
x
,
.
)
>
\forall h \in H, and \space \space \forall x \in X, h(x) = <h, K(x, .)>
∀h∈H,and ∀x∈X,h(x)=<h,K(x,.)>
H H H 被称为 和 K K K 关联 的 复现内核希尔伯特空间 (RKHS)。

















 634
634

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









