






深度强化学习——DDPG算法复现
DDPG(Deep Deterministic Policy Gradient)是一种基于策略的深度强化学习算法,于2016年由Timothy P. Lillicrap等人提出,论文:“Timothy P. Lillicrap,Jonathan J. Hunt,and Alexander Pritzel et al, CONTINUOUS CONTROL WITH DEEP REINFORCEMENT LEARNING,2016”,能够解决Actor-critic收敛速度慢的问题,现在已成为经典的深度强化学习算法。具体原理参见论文。也可参考博客:
https://blog.csdn.net/qq_30615903/article/details/80776715?ops_request_misc=&request_id=&biz_id=102&utm_term=DDPG&utm_medium=distribute.pc_search_result.none-task-blog-2allsobaiduweb~default-0-80776715
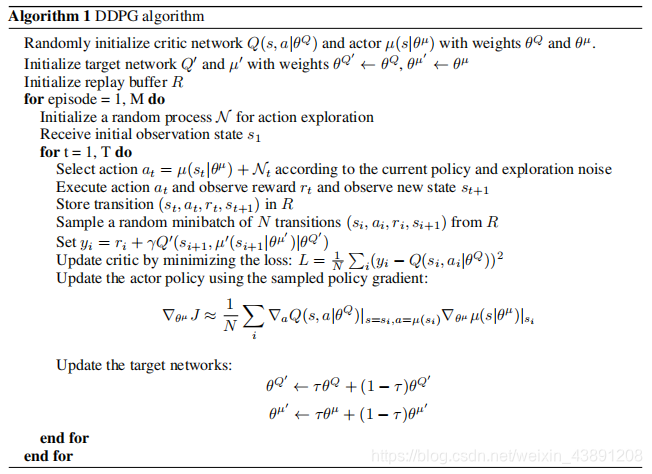
算法框架如下:
实现场景
这里以gym中的游戏“Pendulum-v0”为例,复现论文中的算法。“Pendulum-v0”是简单的杠杆平衡游戏,目标是使杠杆最后能够停留在顶端保持平衡。
算法平台
算法已经修改成了能够在windows上运行,编译软件是Vscode,python3.6.2,tensorflow1.4.0.
算法实现
导入相应的包
import os
import tensorflow as tf
import numpy as np
噪声
class OUActionNoise(object):
def __init__(self,mu,sigma=0.15,theta=0.2,dt=1e-2,x0=None):
self.theta = theta
self.mu = mu
self.dt = dt
self.sigma = sigma
self.x0 = x0
self.reset()
def __call__(self):
# noise = OUActionNoise
x = self.x_prev + self.theta*(self.mu - self.x_prev)*self.dt +\
self.sigma*np.sqrt(self.dt)*np.random.normal(size=self.mu.shape)
self.x_prev = x
return x
def reset(self):
self.x_prev = self.x0 if self.x0 is not None else np.zeros_like(self.mu)
经验池
class ReplayBuffer(object):
def __init__(self,max_size,input_shape,n_actions):
self.mem_size = max_size
self.mem_cntr = 0
self.state_memory = np.zeros((self.mem_size,*input_shape))
self.new_state_memory = np.zeros((self.mem_size,*input_shape))
self.action_memory = np.zeros((self.mem_size,n_actions))
self.reward_memory = np.zeros(self.mem_size)
self.terminal_memory = np.zeros(self.mem_size,dtype=np.float32)
def store_transition(self,state,action,reward,state_,done):
index = self.mem_cntr%self.mem_size
self.state_memory[index] = state
self.new_state_memory[index] = state_
self.reward_memory[index] = reward
self.action_memory[index] = action
self.terminal_memory[index] = 1-int(done)
self.mem_cntr += 1
def sample_buffer(self,batch_size):
max_mem = min(self.mem_cntr,self.mem_size)
batch = np.random.choice(max_mem,batch_size)
states = self.state_memory[batch]
actions = self.action_memory[batch]
new_states = self.new_state_memory[batch]
rewards = self.reward_memory[batch]
terminal = self.terminal_memory[batch]
return states,actions,new_states,rewards,terminal
Actor
class Actor(object):
def __init__(self,lr,n_actions,name,input_dims,sess,fc1_dims,
fc2_dims,action_bound,batch_size=64,chkpt_dir = "DDPG_paper_reproduction"):
self.lr = lr
self.n_actions = n_actions
self.input_dims = input_dims
self.name = name
self.fc1_dims = fc1_dims
self.fc2_dims = fc2_dims
self.sess = sess
self.batch_size = batch_size
self.action_bound = action_bound
self.ckpt_dir = chkpt_dir
self.build_network()
self.params = tf.trainable_variables(scope=self.name)
self.saver = tf.train.Saver()
self.checkpoint_file = os.path.join(chkpt_dir,name+'_ddpg.ckpt')
self.unnormalized_actor_gradients = tf.gradients(self.mu,self.params,
-self.action_gradient)
self.actor_gradients = list(map(lambda x: tf.div(x,self.batch_size),
self.unnormalized_actor_gradients))
self.optimize = tf.train.AdamOptimizer(self.lr).\
apply_gradients(zip(self.actor_gradients,self.params))
def build_network(self):
with tf.variable_scope(self.name):
self.input = tf.placeholder(tf.float32,
shape=[None,*self.input_dims],
name = 'inputs')
self.action_gradient = tf.placeholder(tf.float32,
shape = [None,self.n_actions])
f1 = 1/np.sqrt(self.fc1_dims)
dense1 = tf.layers.dense(self.input,units=self.fc1_dims,
kernel_initializer=tf.random_uniform_initializer(-f1,f1),
bias_initializer=tf.random_uniform_initializer(-f1,f1))
batch1 = tf.layers.batch_normalization(dense1)
layer1_activation = tf.nn.relu(batch1)
f2 = 1/np.sqrt(self.fc2_dims)
dense2 = tf.layers.dense(layer1_activation,units=self.fc2_dims,
kernel_initializer=tf.random_uniform_initializer(minval=-f2,maxval=f2),
bias_initializer=tf.random_uniform_initializer(minval=-f2,maxval=f2))
batch2 = tf.layers.batch_normalization(dense2)
layer2_activation = tf.nn.relu(batch2)
f3 = 0.003
mu = tf.layers.dense(layer2_activation,units=self.n_actions,
# activation = 'tanh',
kernel_initializer=tf.random_uniform_initializer(minval=-f3,maxval=f3),
bias_initializer=tf.random_uniform_initializer(-f3,f3))
mu = tf.nn.tanh(mu)
self.mu = tf.multiply(mu,self.action_bound)
def predict(self,inputs):
return self.sess.run(self.mu,feed_dict={self.input:inputs})
def train(self,inputs,gradients):
self.sess.run(self.optimize,
feed_dict = {self.input:inputs,
self.action_gradient:gradients})
def save_checkpoint(self):
print('...saving checkpoint...')
self.saver.save(self.sess,self.checkpoint_file)
def load_checkpoint(self):
print('...loading checkpoint...')
self.saver.restore(self.sess,self.checkpoint_file)
Critic
class Critic(object):
def __init__(self,lr,n_actions,name,input_dims,sess,fc1_dims,
fc2_dims,batch_size=64,chkpt_dir = "DDPG_paper_reproduction"):
self.lr = lr
self.n_actions = n_actions
self.input_dims = input_dims
self.name = name
self.fc1_dims = fc1_dims
self.fc2_dims = fc2_dims
self.sess = sess
self.batch_size = batch_size
self.ckpt_dir = chkpt_dir
self.build_network()
self.params = tf.trainable_variables(scope=name)
self.saver = tf.train.Saver()
self.checkpoint_file = os.path.join(chkpt_dir,name+'_ddpg.ckpt')
self.optimize = tf.train.AdamOptimizer(self.lr).minimize(self.loss)
self.action_gradients = tf.gradients(self.q,self.actions)
def build_network(self):
with tf.variable_scope(self.name):
self.input = tf.placeholder(tf.float32,
shape=[None,*self.input_dims],
name = 'inputs')
self.actions = tf.placeholder(tf.float32,
shape = [None,self.n_actions],
name='actions')
self.q_target = tf.placeholder(tf.float32,
shape = [None,1],
name='targets')
f1 = 1/np.sqrt(self.fc1_dims)
dense1 = tf.layers.dense(self.input,units=self.fc1_dims,
kernel_initializer=tf.random_uniform_initializer(-f1,f1),
bias_initializer=tf.random_uniform_initializer(-f1,f1))
batch1 = tf.layers.batch_normalization(dense1)
layer1_activation = tf.nn.relu(batch1)
f2 = 1/np.sqrt(self.fc2_dims)
dense2 = tf.layers.dense(layer1_activation,units=self.fc2_dims,
kernel_initializer=tf.random_uniform_initializer(-f2,f2),
bias_initializer=tf.random_uniform_initializer(-f2,f2))
batch2 = tf.layers.batch_normalization(dense2)
action_in = tf.layers.dense(self.actions,units=self.fc2_dims
)# activation='relu'
action_in = tf.nn.relu(action_in)
state_actions = tf.add(batch2,action_in)
state_actions = tf.nn.relu(state_actions)
f3 = 0.003
self.q = tf.layers.dense(state_actions,units=1,
kernel_initializer=tf.random_uniform_initializer(-f3,f3),
bias_initializer=tf.random_uniform_initializer(-f3,f3),
kernel_regularizer=tf.keras.regularizers.l2(0.01))
self.loss = tf.losses.mean_squared_error(self.q_target,self.q)
def predict(self,inputs,actions):
return self.sess.run(self.q,
feed_dict={self.input:inputs,
self.actions:actions})
def train(self,inputs,actions,q_target):
self.sess.run(self.optimize,
feed_dict = {self.input:inputs,
self.actions:actions,
self.q_target:q_target})
def get_action_gradients(self,inputs,actions):
return self.sess.run(self.action_gradients,
feed_dict={self.input:inputs,
self.actions:actions})
def save_checkpoint(self):
print('...saving checkpoint...')
self.saver.save(self.sess,self.checkpoint_file)
def load_checkpoint(self):
print('...loading checkpoint...')
self.saver.restore(self.sess,self.checkpoint_file)
Agent
class Agent(object):
def __init__(self,alpha,beta,input_dims,tau,env,gamma=0.99,
n_actions=2,max_size=100000,layer1_size=400,layer2_size=300,
batch_size=64):
self.gamma=gamma
self.tau=tau
self.memory = ReplayBuffer(max_size,input_dims,n_actions)
self.batch_size = batch_size
self.sess = tf.Session()
self.actor = Actor(alpha,n_actions,'Actor',input_dims,self.sess,
layer1_size,layer2_size,env.action_space.high)
self.critic = Critic(beta,n_actions,'Critic',input_dims,self.sess,
layer1_size,layer2_size)
self.target_actor = Actor(alpha,n_actions,'TargetActor',input_dims,
self.sess,layer1_size,layer2_size,
env.action_space.high)
self.target_critic = Critic(beta,n_actions,'TargetCritic',input_dims,
self.sess,layer1_size,layer2_size)
self.noise = OUActionNoise(mu=np.zeros(n_actions))
self.update_critic = \
[self.target_critic.params[i].assign(
tf.multiply(self.critic.params[i],self.tau)\
+tf.multiply(self.target_critic.params[i],1-self.tau))
for i in range(len(self.target_critic.params))]
self.update_actor = \
[self.target_actor.params[i].assign(
tf.multiply(self.actor.params[i],self.tau)\
+tf.multiply(self.target_actor.params[i],1-self.tau))
for i in range(len(self.target_actor.params))]
self.sess.run(tf.global_variables_initializer())
self.update_network_parameters(first=True)
def update_network_parameters(self,first=False):
if first:
old_tau = self.tau
self.tau = 1.0
self.target_critic.sess.run(self.update_critic)
self.target_actor.sess.run(self.update_actor)
self.tau = old_tau
else:
self.target_critic.sess.run(self.update_critic)
self.target_actor.sess.run(self.update_actor)
def remember(self,state,action,reward,new_state,done):
self.memory.store_transition(state,action,reward,new_state,done)
def choose_action(self,state):
state = state[np.newaxis,:]
mu = self.actor.predict(state)
noise = self.noise()
mu_prime = mu + noise
return mu_prime[0]
def learn(self):
if self.memory.mem_cntr < self.batch_size:
return
state,action,new_state,reward,done = \
self.memory.sample_buffer(self.batch_size)
critic_value = self.target_critic.predict(new_state,
self.target_actor.predict(new_state))
target = []
for j in range(self.batch_size):
target.append(reward[j]+self.gamma*critic_value[j]*done[j])
target = np.reshape(target,(self.batch_size,1))
_ = self.critic.train(state,action,target)
a_outs = self.actor.predict(state)
grads = self.critic.get_action_gradients(state,a_outs)
self.actor.train(state,grads[0])
self.update_network_parameters()
def save_models(self):
self.actor.save_checkpoint()
self.target_actor.save_checkpoint()
self.critic.save_checkpoint()
self.target_critic.save_checkpoint()
def load_models(self):
self.actor.load_checkpoint()
self.target_actor.load_checkpoint()
self.critic.load_checkpoint()
self.target_critic.load_checkpoint()
#测试,调用gym模块和前面定义的类
from ddpg_tf_orig import Agent #前面定义的类封装在ddpg_tf_orig.py中
import numpy as np
import gym
if __name__ == '__main__':
env = gym.make('Pendulum-v0')
obs = env.reset()
agent = Agent(alpha=0.0001,beta=0.001,input_dims=[3],tau=0.001,env=env,
batch_size=64,layer1_size=400,layer2_size=300,n_actions=1)
score_history = []
np.random.seed(0)
for i in range(1000):
obs = env.reset()
env.render()
done = False
score = 0
while not done:
act = agent.choose_action(obs)
new_state,reward,done,info = env.step(act)
agent.remember(obs,act,reward,new_state,int(done))
agent.learn()
score += reward
obs = new_state
score_history.append(score)
print('episode',i,'score % .2f' % score,
'100 game average % .2f' % np.mean(score_history[-100:]))

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









