







本系列将从下面几方面谈谈最近的一点点收获
令声明:本文主要是对我找到的一个莫名其妙国外英文pdf文件的学习与解读,因为我也没有找到他的出处(也没作者也没学校),所以我仅以此段文字向这个未知的作者致敬。本文主要处于科普类的理解,列出的主要算法并没有给出详细解读,从csdn上找到了各处有效的不错的超链接,附在对应算法后,方便读者查阅,侵删。
频繁模式(Frequent Patterns)
搜索优化算法( Search Optimization Algorithms)
频繁项集挖掘(Frequent Itemset Mining)
序列挖掘(Sequence Mining)
频繁模式
过度进食、睡眠、吸烟、饮酒、压力、心脏病发作、睡眠、暴饮暴食、吸烟、饮酒、压力????这些词之间到底有什么值得我们去发掘。
- 频繁模式挖掘是识别那些经常发生的事件、任务、实体等的过程
- 尽管其搜索空间简易,但依旧在数据挖掘中占有重要的一席位
定义
- 事务(Transaction):指将实体聚集在一起的单元
- 项目集(itemset):指出现在数据集中的一个或多个事件、实体、数据对象、项的集合
| Transactions | Items |
|---|---|
| 1 | a, b, c, d |
| 2 | b, d |
| 3 | b, e |
| 4 | a, c, d |
| 5 | a, d |
| 6 | a, c, e |
| 7 | b, c |
| 8 | c, e |
| 9 | d, e |
| 10 | a, c |
例如,在情况2中,我们有三个不同的项集:
{b},{d},{b,d}。
在情形6,我们有七个不同的项集:
{a},{c},{e},{a,c},{a,e},{c,e},{a,c,e}。
- 数学支持A与B可以被写成
s u p p o r t ( A , B ) = P ( A ∩ B ) support(A,B)=P(A∩B) support(A,B)=P(A∩B) - 置信度(Confidence):指如果实体A发生,那么实体B也发生的一种值。
我们可以这么写
c o n f i d e n c e ( A = > B ) = P ( A ∣ B ) = s u p p o r t ( A , B ) s u p p o r t ( A ) confidence(A=>B)=P(A|B)=\frac{support(A,B)}{support(A)} confidence(A=>B)=P(A∣B)=support(A)support(A,B)
例证
从上表分析可知:
s
u
p
p
o
r
t
(
A
,
B
)
=
0.1
support(A,B)=0.1
support(A,B)=0.1
置信度为:
c
o
n
f
i
d
e
n
c
e
(
A
=
>
B
)
=
P
(
A
∣
B
)
=
0.1
0.5
=
0.2
confidence(A=>B)=P(A|B)=\frac{0.1}{0.5}=0.2
confidence(A=>B)=P(A∣B)=0.50.1=0.2
搜索优化算法( Search Optimization Algorithms)
频繁项集中的挖掘搜索
关联规则挖掘包括两个主要步骤:
第一步:找到频繁项集(或候选项生成)
第二步:生成从频繁项集关联规则(或计算支持和每个候选项的置信度)
其中,大多数时间复杂度高的算法都是为了完成第一步。需要注意的是,如果不使用搜索优化算法,那么数据的时间复杂度将是
O
(
2
n
)
O(2^n)
O(2n),这意味着即使是在小范围的数据集中,暴力完成的方法也是不可取的。
搜索优化算法
我这里仅列出对应的优化算法,并引用部分csdn优质博客链接供参考
希望大家多多给这些博客博主点赞
- 哈希散列表(Hash Tables)
哈希散列表
MinHashing - 树结构(Tree Structures)
二叉树
平衡二叉树
漫画讲述B-树
红黑树
前缀树 - 位操作(Bit Manipulations)
信息论编码压缩
LZ压缩
哈夫曼编码 - 滑动窗算法(Sliding Window)
Sliding window - 布隆过滤器(Bloom Filter)
布隆过滤器
那我现在假设上面的内容你们都已经有所了解或是掌握,毕竟这是个科普类的博客,我们继续往下。
频繁项集挖掘
算法
- Apriori
简介:
Apriori是第一个基于自底向上的关联规则挖掘算法,它迭代地扫描着数据集。在每次迭代中,算法构建两个列表,一个候选列表和一个频繁列表,令其大小为k(kitemset)。随后,再下一次迭代中,算法增加k的大小,并更新候选列表与频繁列表。重复此过程直到常用列表中均不大于最小支持集。然后,满足最小支持条件的频繁项集将被分开,用于计算他们的置信度和最小项集,同时满足最低支持和最小置信度的将被作为频繁项集的结果返回。
min_support = 0.6 min_confidence=0.8
| Txn# | Items |
|---|---|
| 1 | a, c, d |
| 2 | b, c, e |
| 3 | a, b, c, e |
| 4 | b, e |
| 5 | a, c, e |
C1
| Itemset | support |
|---|---|
| a | 3 |
| b | 3 |
| c | 4 |
| d | 1 |
| e | 4 |
其中,d < min_support,我们得到
F1
| Itemset | support |
|---|---|
| a | 3 |
| b | 3 |
| c | 4 |
| e | 4 |
使用F1生成C2数据集并对他们进行计数
C2
| Itemset | support |
|---|---|
| a ,b | 1 |
| a,c | 3 |
| a,e | 2 |
| b,c | 2 |
| b,e | 3 |
| c,e | 3 |
同理,{a,b},{a,e},{b,c}<min_support
我们得到F2
F2
| Itemset | support |
|---|---|
| a,c | 3 |
| b,e | 3 |
| c,e | 3 |
使用F2生成C3数据集并对他们进行计数
C3
| Itemset | support |
|---|---|
| a,b,c | 1 |
| a,b,e | 1 |
| a,c,e | 2 |
| b,c,e | 2 |
发现所有的都小于min_support,因此F3不存在,退回到F2,作为频繁项集返回。
计算置信度:
置信度是一个值,表示如果一个实体发生,则另一个实体也同时出现。
c
o
n
f
i
d
e
n
c
e
(
A
=
>
B
)
=
P
(
A
∣
B
)
=
s
u
p
p
o
r
t
(
A
,
B
)
s
u
p
p
o
r
t
(
A
)
confidence(A=>B)=P(A|B)=\frac{support(A,B)}{support(A)}
confidence(A=>B)=P(A∣B)=support(A)support(A,B)
同样是上面的表格,我们计算可知:
c
o
n
f
i
d
e
n
c
e
(
a
,
c
)
=
3
/
3
=
1.00
c
o
n
f
i
d
e
n
c
e
(
c
,
a
)
=
3
/
4
=
0.75
c
o
n
f
i
d
e
n
c
e
(
b
,
e
)
=
3
/
3
=
1.00
c
o
n
f
i
d
e
n
c
e
(
e
,
b
)
=
3
/
4
=
0.75
c
o
n
f
i
d
e
n
c
e
(
c
,
e
)
=
3
/
4
=
0.75
c
o
n
f
i
d
e
n
c
e
(
e
,
c
)
=
3
/
4
=
0.75
confidence (a,c) = 3/3 = 1.00\\ confidence (c,a) = 3/4 = 0.75\\ confidence (b,e) = 3/3 = 1.00\\ confidence (e,b) = 3/4 = 0.75\\ confidence (c,e) = 3/4 = 0.75\\ confidence (e,c) = 3/4 = 0.75\\
confidence(a,c)=3/3=1.00confidence(c,a)=3/4=0.75confidence(b,e)=3/3=1.00confidence(e,b)=3/4=0.75confidence(c,e)=3/4=0.75confidence(e,c)=3/4=0.75
据上述结果可知,最小频繁集为{a,c},{b,e},因为其余的都小于最小置信度(0.8)
code:
pip install efficient_apriori
from efficient_apriori import apriori
transactions = [('eggs', 'bread', 'soup'),
('eggs', 'bread', 'apple'),
('soup', 'bread', 'banana'),
('bread','banana','jam')]
# note support and confidence should be between 0 and 1
itemsets, rules = apriori(transactions, min_support=0.5,
min_confidence=0.8)
print(rules)
- FP-Growth
- 简介
Apriori在数据集大小增长时并不有效,因为:
(i)它需要创建一个非常大的候选列表。
(ii)它需要的在每个迭代中扫描数据集以生成频繁项集列表。
FP-Growth算法分为两个主要步骤:
(i)创建FP-Tree(频繁模式树,是一个压缩的树中数据集)
(ii)分割压缩数据集(FP-Tree)成一组更小的数据集。这些小数据集叫做条件模式基于,FP-Growth算法从中寻找频繁项集
演示如下:

(a) 包含八个事务的样本数据集
(b)已计算每个项目的支持度
(c)已删除低于最小支持的项目
然后,该算法扫描原始数据集中的每个事务,并根据支持的频率对其项进行排序,并得到下表:
| Txn# | Items | based on min_support |
|---|---|---|
| 1 | a, c, d, e | e, d, a, c |
| 2 | a, b, d | d, a |
| 3 | c, d, e | e, d, c |
| 4 | a, b, c, e | e, a, c |
| 5 | b, d, e | e, d |
| 6 | a, d, e | e, d, a |
| 7 | a, c , d | d, a |
| 8 | b, d, e | e,d |
min_support=3

相较于原数据集,FP树显然占用更少的空间,因为有些项集共享了部分路径
,同时FP树也包含了我们所需要的所有数据。
下一步就是从FP树中提取条件模式.该算法采用自底向上的方法,即从叶节点开始到根节点,按照以下顺序{c,a,d,e}.


-
我们需要看看“c”是否是基于给定最小支持的频繁项集:该算法计算子树中的“c”(沿虚线计算“c”的所有值),其中有3个“c”小于最小支持,因此子树2将被解析。第二层子树是“a”。如图,满足最小支撑条件。因此,它列出了结尾有“a”的频繁项集,如下所示:
{e,d,a},{d,a},{e,a}
同理我们列出d、e的{d,e},{d},{e} -
创建“条件模式库”之后,下一步是创建“条件FP树”,该算法通过“条件基模式”并选择所有“条件模式库”中共同的项目。
对于’c’,其条件模式基唯一常见项时e,且出现了三次,即{e:3} -
在创建了条件FP-Tree之后,下一步是创建频繁模式,如“frequent pattern”列中所示,您可以在下面看到,通过将项“d”组合到它的“条件FP树”,我们将得到一个频繁模式:{d,e:5}

a,d 小于最小支持,直接略过
计算置信度:
c o n f i d e n c e ( d , e ) = 5 / 6 = 0.83 c o n f i d e n c e ( e , d ) = 0 c o n f i d e n c e ( c , e ) = 3 / 4 = 0.75 c o n f i d e n c e ( e , c ) = 0 c o n f i d e n c e ( a , e ) = 3 / 5 = 0.6 c o n f i d e n c e ( e , a ) = 3 / 6 = 0.5 c o n f i d e n c e ( a , d ) = 3 / 7 = 0.42 c o n f i d e n c e ( d , a ) = 3 / 5 = 0.6 confidence (d,e) = 5/6 = 0.83\\ confidence (e,d) = 0 \\ confidence (c,e) = 3/4 = 0.75\\ confidence (e,c) = 0 \\ confidence (a,e) = 3/5 = 0.6\\ confidence (e,a) = 3/6 = 0.5\\ confidence (a,d) = 3/7 = 0.42\\ confidence (d,a) = 3/5 = 0.6\\ confidence(d,e)=5/6=0.83confidence(e,d)=0confidence(c,e)=3/4=0.75confidence(e,c)=0confidence(a,e)=3/5=0.6confidence(e,a)=3/6=0.5confidence(a,d)=3/7=0.42confidence(d,a)=3/5=0.6
{d,e},{c,e},{a,e},{e,a},{e,a},{d,a}可以作为关联规则返回.
code:
import pyfpgrowth
transactions = [('eggs', 'bread', 'soup'),
('eggs', 'bread', 'apple'),
('soup', 'bread', 'banana'),
('bread','banana','jam')]
patterns = pyfpgrowth.find_frequent_patterns(transactions, 2)
patterns
- Eclat
等价类转换(ECLAT)是一种频繁关联挖掘算法,它不像Apriori需要频繁扫描数据集。
Eclat假定事务按字典顺序排序,它处理每个项目的支持标识过程与一般的方法有所不同。Eclat在DFS模式下搜索项目树,DFS可以更快地发现长频模式,但这对于存储来说通常不是有效方案。
Eclat将数据集转换为垂直格式并扫描tid列表数据集,然后根据tid列表之间的交集,提取频繁模式。在创建tid列表之后,该算法迭代新生成的tid列表,并比较每个项目tid列表与所有其他tid列表的交集。换言之,在第k个频繁项集被识别后,该算法将k增加到k+1,并在最新项列表上再次迭代以识别频繁项集(基于项的tid列表之间的交集)。
重复此过程,直到不再有交集,并且所有交集结果将为空或小于最小支持。

code:
import pandas as pd
from fim import eclat
transactions = [('eggs', 'bread', 'soup'),
('eggs', 'bread', 'apple'),
('soup', 'bread', 'banana'),
(‘bread','banana','jam')]
rules = eclat(tracts = transactions, zmin = 3)
rules
频繁项集挖掘
关联规则挖掘算法没有考虑事务中数据对象的顺序。他们希望用户通过词典对条目进行排序,然后将它们输入到算法中。当数据顺序较为重要是,关联规则挖掘的弊端就出现了,比如,包含时间戳或具有时间概念及其事件时间的数据集。
事务内容将定义为<a,b,(c,d),f>格式。这意味着第一个事件是’a’,然后是’b’,接着’c’和’d’(同时发生),最后’f’发生。
-
GSP
广义序列模式算法[Srikant’96](GSP)是一种基本的序列模式挖掘算法。
第一步(候选生成),计算数据集中每个项的所有支持。
第二步(修剪),删除频率小于最小支持的元素。
第三步,合并项目并创建k+1大小元素序列(k是迭代次数)。
重复执行第二步和第三步,直到没有新的项集将被创建。


通过检查两个表中的所有元素。我们将有以下序列:
< a , a > , < a , b > , < a , c > , < a , d > , < a , e > , < a , f > , … < f , f > , < ( a , b ) > … < ( e , f ) > <a,a>,<a,b>,<a,c>,<a,d>,<a,e>,<a,f>,…<f,f>,<(a,b)>…<(e,f)> <a,a>,<a,b>,<a,c>,<a,d>,<a,e>,<a,f>,…<f,f>,<(a,b)>…<(e,f)>
然后统计数据集中的这些序列,并删除那些小于min_support的序列。例如 < a , a > <a,a> <a,a>存在于Seq ID.3和Seq ID.5中,保留; < a , f > <a,f> <a,f>只存在于Seq ID.3中,因此它的出现次数小于min_support=2,移除。
同样,该算法增加迭代值(k=2)并执行另一个迭代,产生以下序列:
< a , a , a > , < a , a , b > , < a , a , c > , < a , a , d > , … < f , f , f > , < ( a , b ) , a > … , < ( e , f ) , f > <a,a,a>,<a,a,b>,<a,a,c>,<a,a,d>,…<f,f,f>,<(a,b),a>…,<(e,f),f> <a,a,a>,<a,a,b>,<a,a,c>,<a,a,d>,…<f,f,f>,<(a,b),a>…,<(e,f),f>,重复此过程,直到没有支持度等于或大于min_支持度的序列,然后算法结束并返回频繁序列,例如 < ( x 2 , x 4 ) , x 3 , x 2 , x 1 > <(x2,x4),x3,x2,x1> <(x2,x4),x3,x2,x1>(在数据集的第五次扫描中获得)和 < x 1 , x 2 , x 2 , x 1 > , < ( x 2 , x 4 ) , x 2 , x 3 > <x1,x2,x2,x1>,<(x2,x4),x2,x3> <x1,x2,x2,x1>,<(x2,x4),x2,x3>,…在数据集的第四次扫描中获得。 -
SPADE
SPADE(stays for Sequential Pattern Discovery)使用的等效类是一种以垂直数据格式运行的序列模式挖掘算法。
首先,它对数据集执行一次扫描,并将数据从水平格式映射到垂直格式。然后,通过连接(k-1)序列的ID来识别k序列。将水平数据集转换为垂直数据集,然后根据其SID和EID分离每个元素:


我们可以看到表’c’、‘e’、‘g’、‘f’和’h’小于min_支持,因此它们将被删除,接下来,算法根据元素表创建元素的组合。这意味着我们还有a,b,d和f,那么算法应该构造它们的二阶组合,即aa,ab,ad,af…
现在,它把这些小表合并成一个组合表。这个组合是基于(i)等SID和(ii)元素的数字顺序构建的。例如,考虑构建AA。
第一个元素是“2”。然后将其与“2”进行比较,由于两者相等,因此算法不会将它们写入结果表(检查下表中的红点和红线)。注意,条件是:第一个EID应该小于第二个EID。
接下来,算法移动到下一个元素,现在它打算将2与3进行比较,2<3因此可以将它们添加到aa表中(见下表中的蓝色虚线)。


为了构造三个元素的组合,该算法将相关的三个表的内容连接起来。
例如,aab将由“a”、“b”和“a”之间的联接构造。abf将由’a’、'b’和’f’之间的连接来解释。下表提供了四个关于算法如何构造三元素联合表的示例。
从结果来看,只有两个元素列为频繁序列似乎很奇怪,不过,我们应该记住括号内的事件不是以一个序列发生的,而是以并行的方式发生的,因此算法正确地没有将括号中的内容视为一个序列。

-
code
data(zaki)
inspect(zaki)
## mine frequent sequences
s1 <- cspade(zaki, parameter = list(support = 0.4),
control=list(verbose = TRUE, tidLists = TRUE))
#s1 <- cspade(zaki, parameter = list(support = 0.4))
summary(s1)
as(s1, "data.frame")
##
summary(tidLists(s1))
transactionInfo(tidLists(s1))
SPADE和GSP都非常有用,但它们有三个缺点:
(i)对数据集执行多次扫描,复杂度高
(ii)生成非常大的候选列表,空间复杂度大
(iii)且不是挖掘长序列模式的最佳方法(与Apriori问题非常相似)。
有一些更nb的算法可以减少数据集扫描,比如FreeSpan和PrefixSpan。
-
FreeSpan
FreeSpan是“frequent pattern-projected sequential pattern mining”,它基于“模式增长”的概念运作。
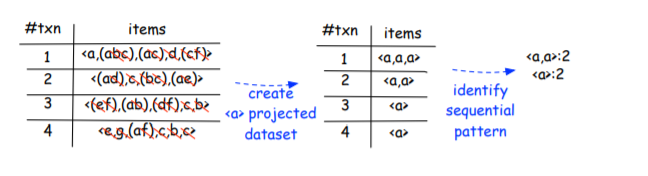
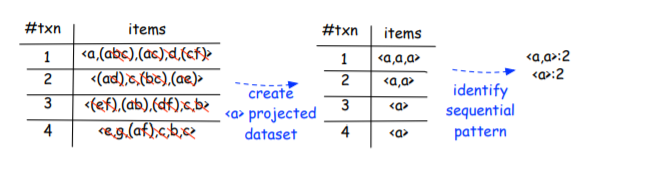
模式增长不需要频繁的候选生成,它递归地创建“投影数据集”,将它们的搜索空间减少到更小的分区中。投影数据集是指从原始数据集递归派生的较小大小的数据集。在从原始数据集派生投影数据集时,频繁项集(序列模式)已经是投影数据集的已知内容。从第一个数据集(不包括第一个数据集)中递归地创建其他数据集的非频繁数据集。
因此,算法最终得到每个投影数据集中的序列模式列表。

因此,该算法最终得到每个投影数据集中的序列模式列表“a”投影数据集是 < a , a , a > , < a > , < a > , < a > {<a,a,a>,<a>,<a>,<a>} <a,a,a>,<a>,<a>,<a>。为了了解我们是如何做到这一点的,让我们看看下表。然后,该算法从投影数据集中提取序列模式,即“ < a , a > : 2 , < a > : 2 <a,a>:2,<a>:2 <a,a>:2,<a>:2”。所以我们可以说,从数据集 < a , a , a > , < a > , < a > , < a > {<a,a,a>,<a>,<a>,<a>} <a,a,a>,<a>,<a>,<a>,提取了序列模式 < a a > <aa> <aa>和 < a > <a> <a>

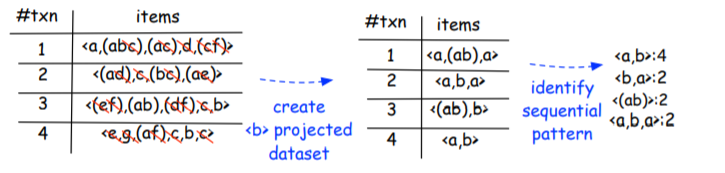
“b”投影数据集是{<a,(ba),a>,<a,b,a>,<(ab),b>,<a,b>}。分析下表,通过搜索这个数据集,我们得到了四个新的序列模式: < a , b > : 4 , < b , a > : 4 , < ( a b ) > : 2 , < a b a > : 2 {<a,b>:4,<b,a>:4,<(ab)>:2,<aba>:2} <a,b>:4,<b,a>:4,<(ab)>:2,<aba>:2

“c”投影数据集是 < a , ( a b c ) , ( a c ) , c > , < a , c , ( b c ) , ( a c ) > , < ( a b ) , c , b > , < a , c , b , c > {<a,(abc),(ac),c>,<a,c,(bc),(ac)>,<(ab),c,b>,<a,c,b,c>} <a,(abc),(ac),c>,<a,c,(bc),(ac)>,<(ab),c,b>,<a,c,b,c>该算法识别频繁的序列模式,
如下所示。具体来说,算法首先识别长度为2的序列模式,‘c’的投影数据集: < a , c > : 4 , < ( b c ) > : 2 , < b , c > : 3 , < c , c > : 3 , < c , a > : 2 , < c , b > : 3 {<a,c>:4,<(bc)>:2,<b,c>:3,<c,c>:3,<c,a>:2,<c,b>:3} <a,c>:4,<(bc)>:2,<b,c>:3,<c,c>:3,<c,a>:2,<c,b>:3

为了识别长度为3的序列模式,对每个识别模式创建另一个投影数据集。
例如
< a , c > <a,c> <a,c>投影集= < a , ( a b c ) , ( a c ) , c > , < a , c , ( b c ) , a > , < ( a b ) , c , b > , < a , c , b , c > {<a,(abc),(ac),c>,<a,c,(bc),a>,<(ab),c,b>,<a,c,b,c>} <a,(abc),(ac),c>,<a,c,(bc),a>,<(ab),c,b>,<a,c,b,c>
这个递归循环一直持续到没有序列模式可识别为止。例如,从<a,c>-投影数据集中,我们有 < a , c , b > : 3 , < a , c , c > : 3 , < ( a b ) , c > : 2 , < a , c , a > : 2 {<a,c,b>:3,<a,c,c>:3,<(ab),c>:2,<a,c,a>:2} <a,c,b>:3,<a,c,c>:3,<(ab),c>:2,<a,c,a>:2从 < a , c > <a,c> <a,c>投影的数据集中识别出的序列模式,但是如果我们寻找 ⟨ a , c , b ⟩ ⟨a,c,b⟩ ⟨a,c,b⟩投影数据集, < a , c , c > <a,c,c> <a,c,c>-投影数据集等。将没有4长度的序列模式,递归循环中断。 -
PrefixSpan
频繁模式投影序列模式挖掘(PrefixSpan使用数据集的投影序列(将搜索空间划分为更小的数据集)来减少搜索空间。它类似于FreeSpan,但不是从所有可能的频繁子序列创建投影序列数据集,而是基于前缀创建投影数据集。
前缀是序列开头的一个项,后缀是序列的剩余部分(没有前缀)。
例如: < a , ( a b c ) , ( a c ) , d , ( c f ) > <a,(abc),(ac),d,(cf)> <a,(abc),(ac),d,(cf)>,我们可以提取其后缀和前缀如下:
Prefix: < a > <a> <a>Suffix: < ( a b c ) ( a c ) , d , ( c f ) > <(abc)(ac),d,(cf)> <(abc)(ac),d,(cf)>
Prefix: < a a > <aa> <aa>Suffix: < ( b c ) ( a c ) , d , ( c f ) > <( bc)(ac),d,(cf)> <(bc)(ac),d,(cf)>
Prefix: < a b > <ab> <ab>Suffix: < ( c ) ( a c ) , d , ( c f ) > <( c)(ac),d,(cf)> <(c)(ac),d,(cf)>
接着将搜索空间划分为更小的数据集,并为每个前缀创建一个投影数据集。
(1) 仅包含“a”的项的子集
(2) 包含“b”但不包含“b”之后的项的子集,即仅“a”和“b”
(3) 包含“c”但不包含“c”之后的项的子集,即“a”、“b”和“c”
(4) 包含“d”但不包含“d”之后的项的子集
(5) 包含“e”但不包含“e”之后的项的子集
(6) 仅包含“f”的项的子集

注:在对数据集进行一次扫描时,所有这六个投影数据集将被构造一次。此外,在将数据集投影到后缀数据集时,前缀项之前的每一项(忽略它们的顺序)都将被删除。

最后是在这些数据集中找到顺序模式。然后,增加前缀的长度(例如,prefix < a > <a> <a>变为prefix < a f > <af> <af>和 p r e f i x < a a > prefix<aa> prefix<aa>),并在新数据集中找到长度更长的序列模式。持续这个过程直到没有候选频繁序列被生成。

-
** code**
from prefixspan import PrefixSpan
db = [
['a', 'b', 'c', 'd', 'e'],
['b', 'b', 'b', 'd', 'e'],
['c', 'b', 'c', 'c', 'a'],
['b', 'b', 'b', 'c', 'c'],
]
ps = PrefixSpan(db)
print(ps.frequent(4))
print("-----------")
print(ps.frequent(3))
print("-----------")
print(ps.frequent(2))
好了,水完了,不点个赞再走嘛

不点赞给我介绍个女朋友也行啊















 5161
5161











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









