






概要
本篇主要介绍使用START工具如何生成触摸工程。Microchip的START工具是一个在线配置工具,它用于帮助开发者快速开始使用Microchip的微控制器(MCU)和开发板。START工具提供了一个用户友好的界面,允许用户选择特定的微控制器型号,然后根据项目需求添加和配置软件组件和库。
START工具在线网页入口:https://start.atmel.com/
START工具
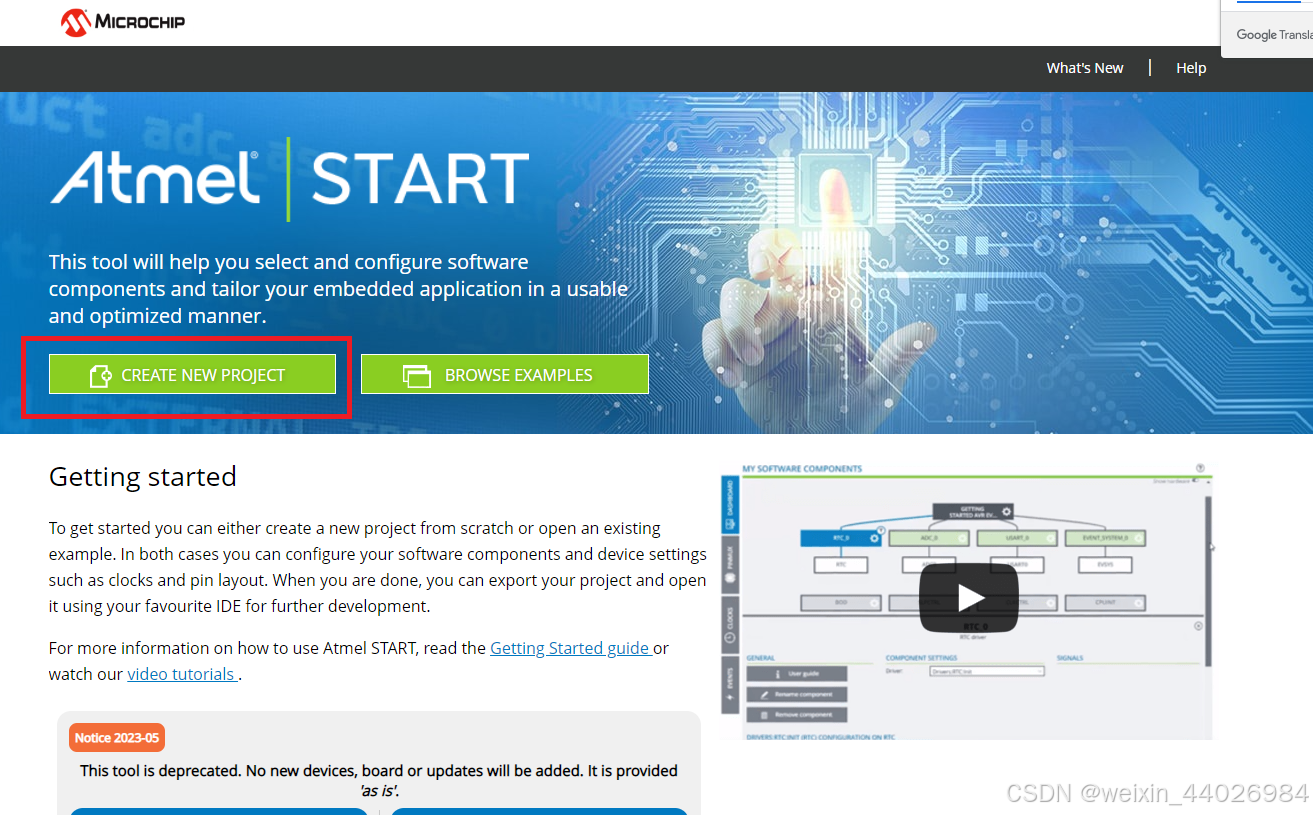
1、点击进入上面的网页链接之后,出现下图,点击红框标注的地方。
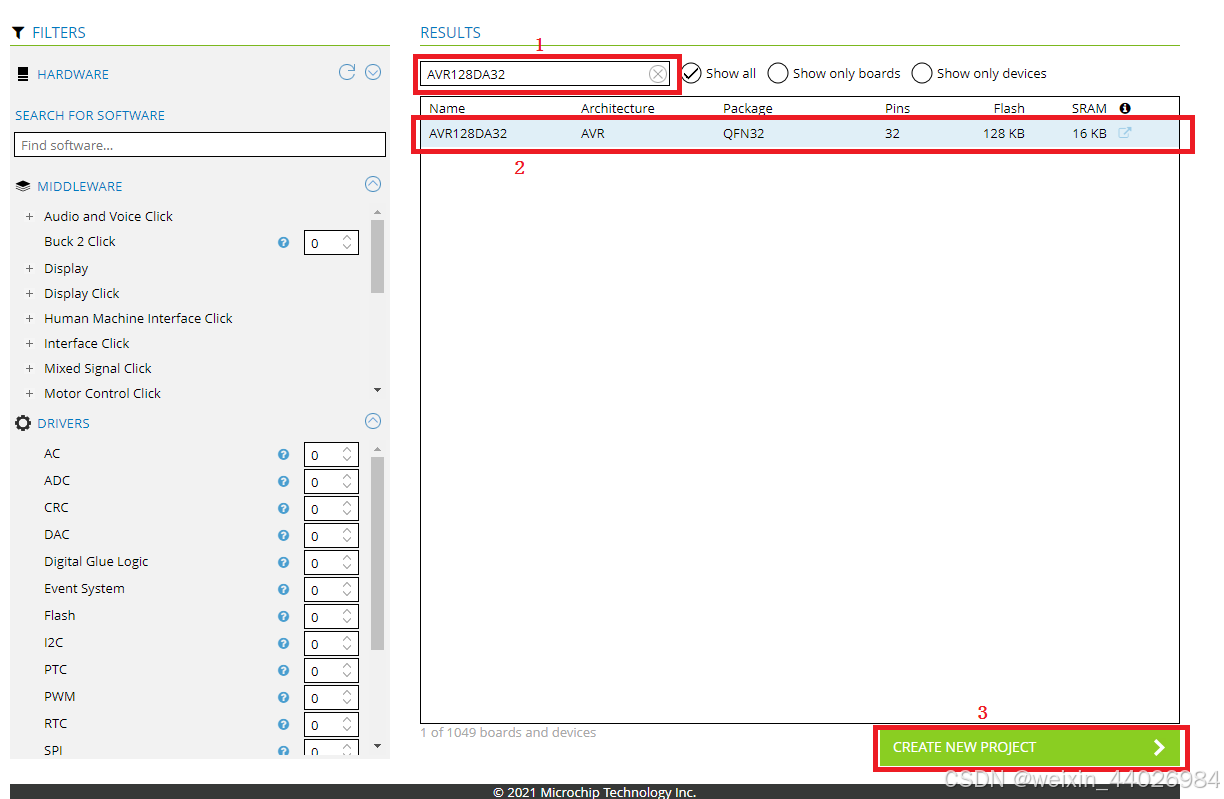
2、在下图中1中选择芯片类型,因为我使用的是AVR128DA32芯片,所以输入了AVR128DA32,如果你使用的是别的芯片,就选择对应的芯片。
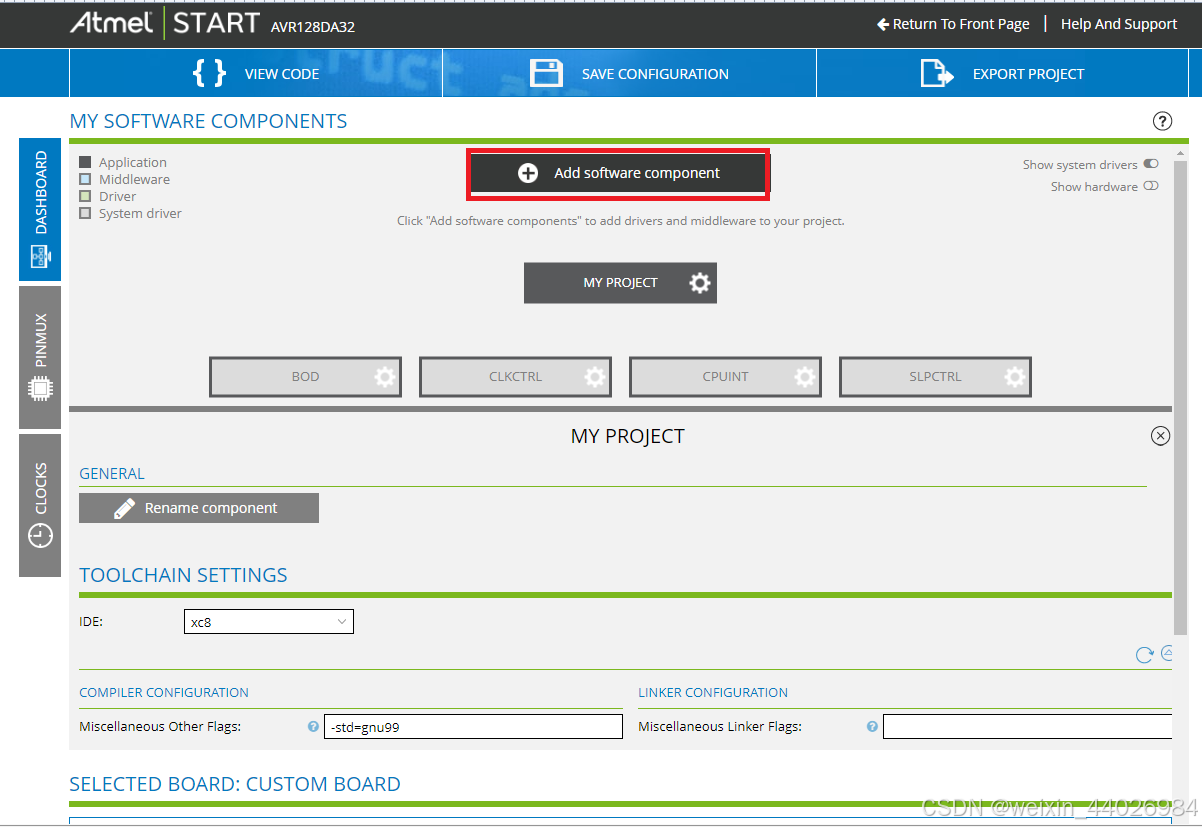
3、点击Add software component,添加触摸库。上一篇已经介绍过触摸库Qtouch,我们要开发触摸功能,就必须添加这个Qtouch库。
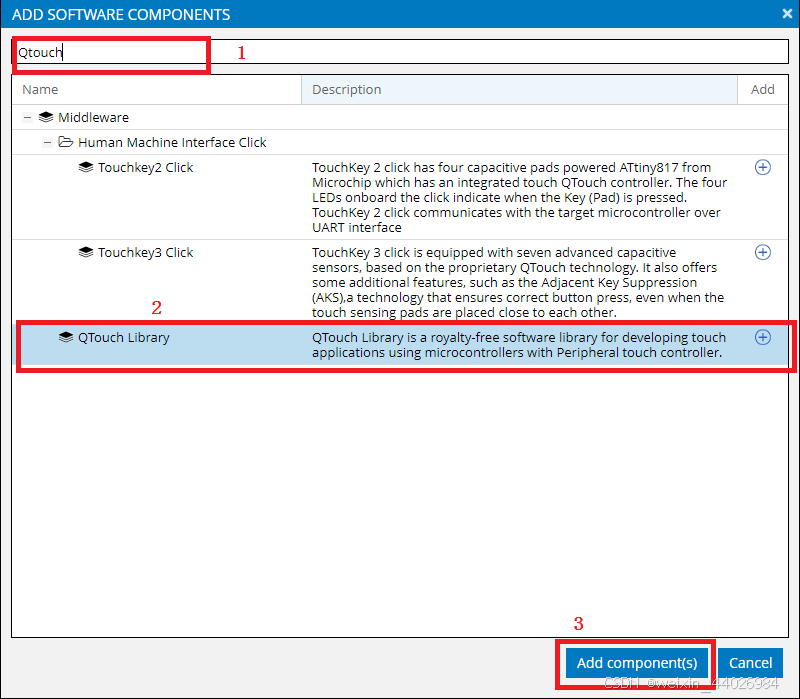
4、点击框1输入Qtouch名称,在2中选择库,然后添加即可。
5、点击下图标注红框位置,这个就是我们刚刚添加的Qtouch库
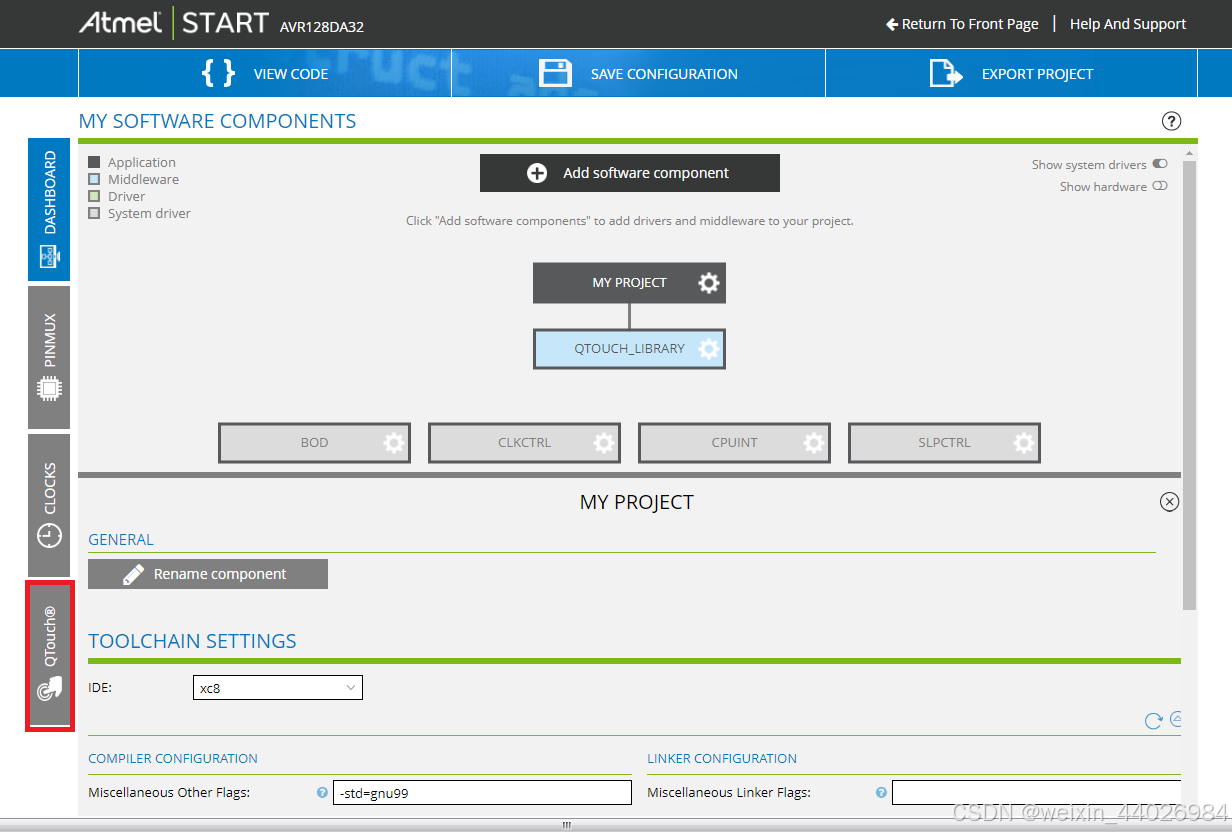
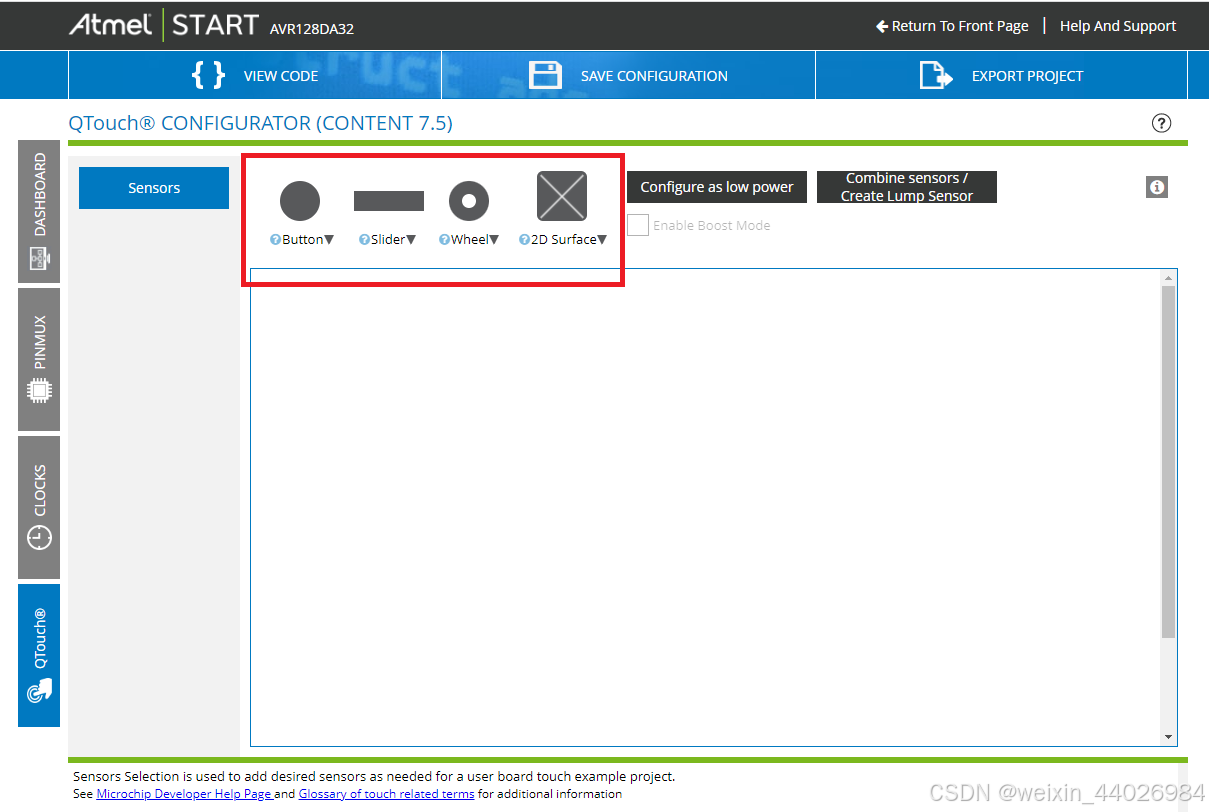
6、在Qtouch库中,我们可以生成下面四种类型的触摸工程,因为我们做的是触摸滑条,所以我选择了Slider,点击Slider旁边的黑色的倒三角,就可以设置滑动条的一些属性了。
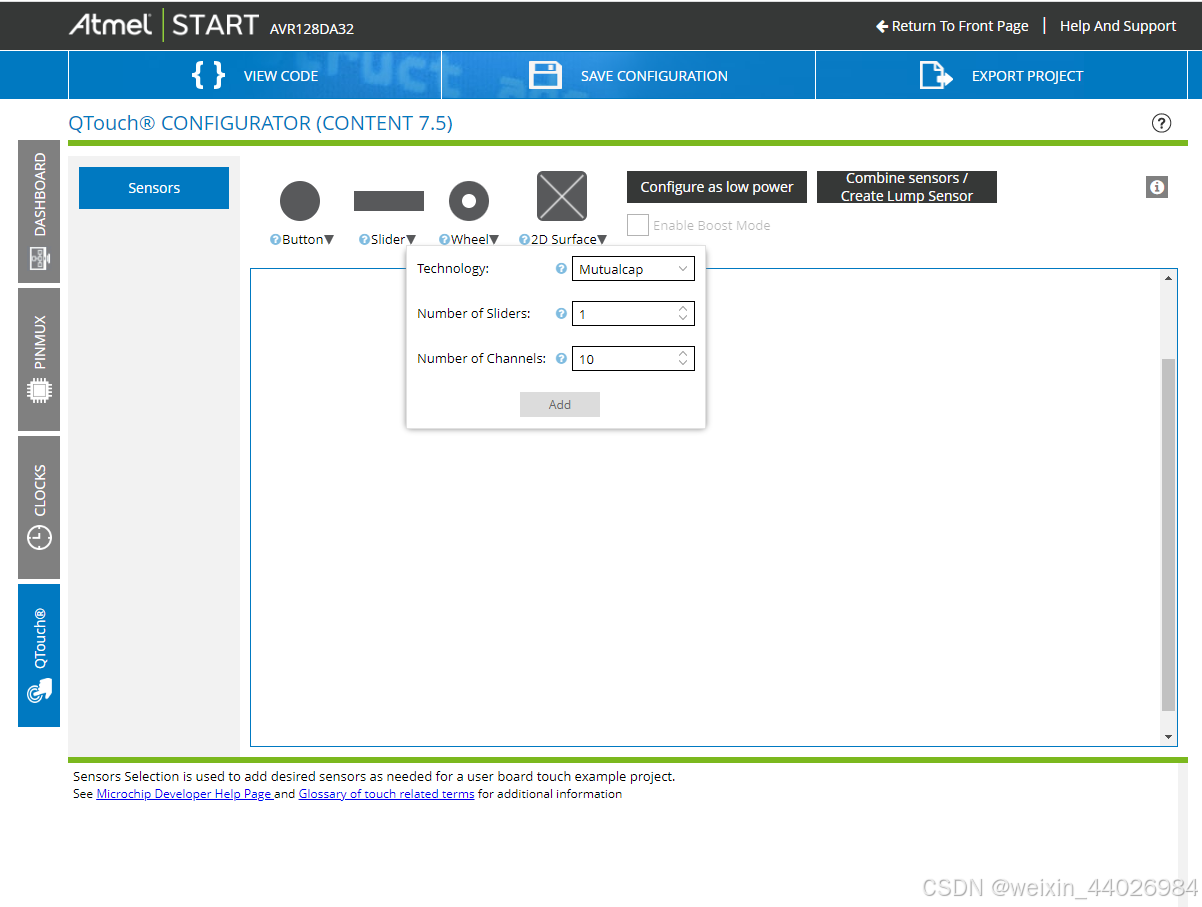
7、下面三个选项是我已经选择完成的状态,简单介绍一下这三项的意思。1、Technology可以选择Selfcap和Mutualcap,这两项的意思是自容式和互容式的传感器技术,因为我要做的是互容式的滑动条,所以我选择了Mutualcap。至于自容式和互容式是什么,大家不明白的就百度搜索一下吧,这里不再介绍。2、Number of Sliders顾名思义就是设置的滑动条的数量,因为我做的是一个滑动条,所以这里我设置为1。3、Number of Channels这个也跟自容式和互容式的原理有关,因为我使用的是互容式,互容式每个传感器的节点是一个电极对(X和Y),这个就是你这段滑动条需要多少个传感器节点,因为我的滑动条原理图设计的是10个节点,所以我这里选择10。选择完成后点击Add。
8、点击Add后就会开始配置传感器设置,可能会出现下图这样的问题,但是不用管它,点OK就好了。
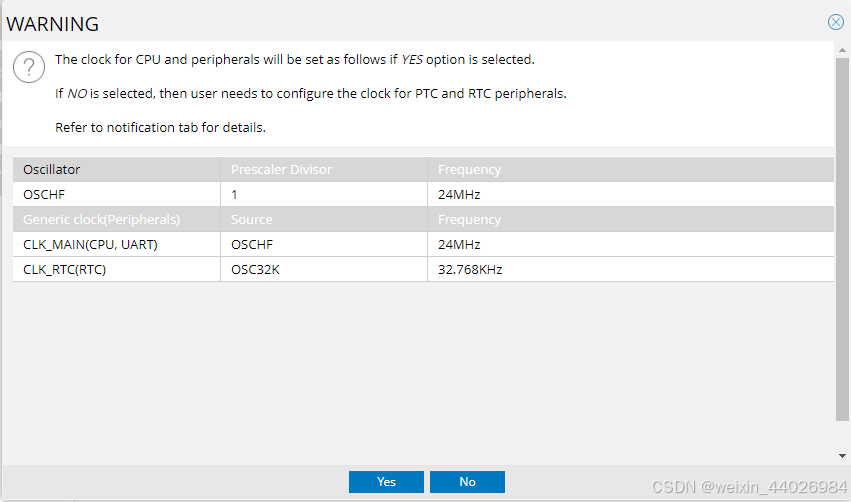
9、之后会弹出这个图,这个图就是配置的一些时钟什么的,第一次生成工程的人可能看不懂,没关系,不用管他,直接点击Yes。
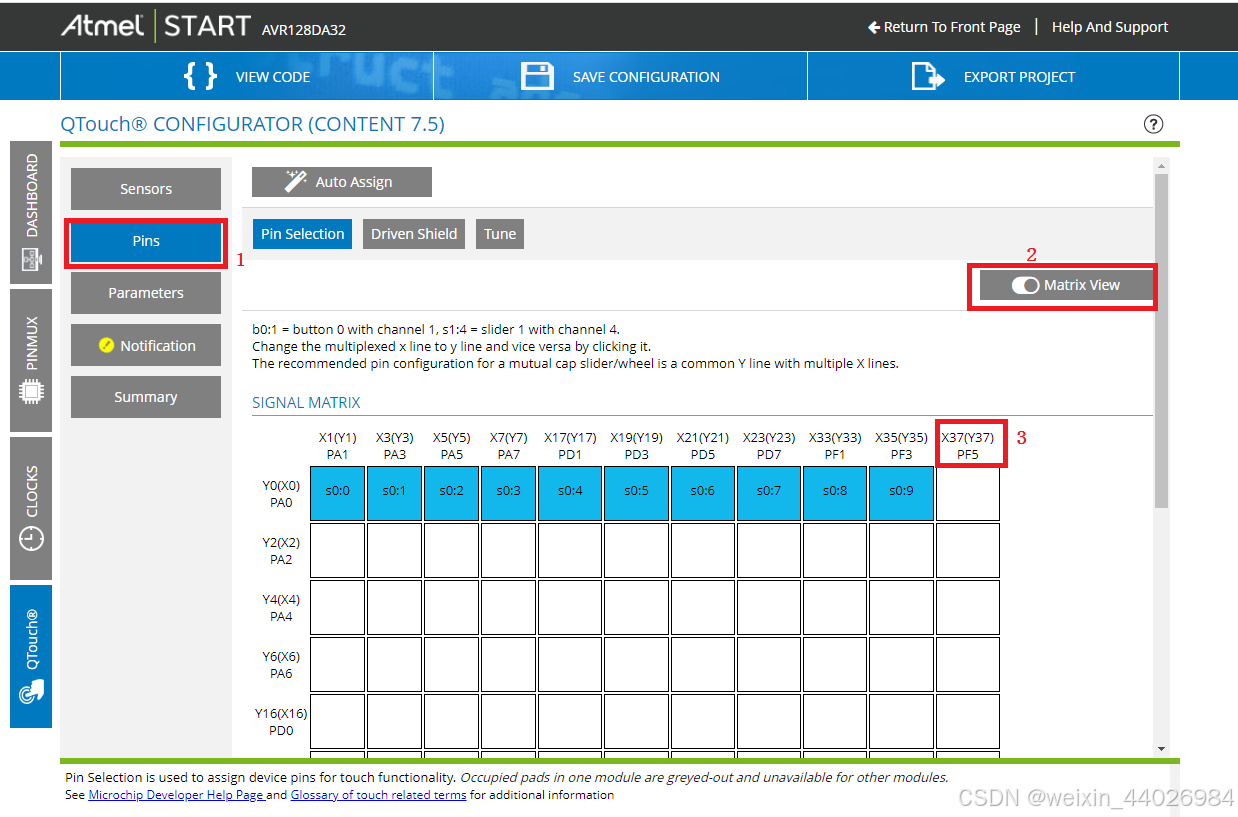
10、上面的配置完成后,点击下图中的Pins框,然后出现右侧的界面,界面中间是一堆图形,你可以在中间区域直接拖动蓝色的框放到你想放的地方,这个图形主要是为你选择的传感器电极(就是电极对)配置对应的IO引脚,我根据我自己开发板的原理图就是下面对应的IO口,所以我就没有更改IO。举个例子,我开发板原理图的节点1有X和Y电极,XY电极分别要连接到一个IO口,我原理图中X连接到PA1,Y连接到PA0,所以在图中是对应的,所以我不需要修改。
下图2的选项也是配置节点IO口的,只不过不是现在下图中图形的界面,大家可以点击2来直接选择节点的IO口。
下图3简单介绍一下,如果你点击了3中间的区域,那么PF3这一列将不会再按照列排列,会加载到行上,这只是一个小用法,所有的行列这个区域都可以点击。
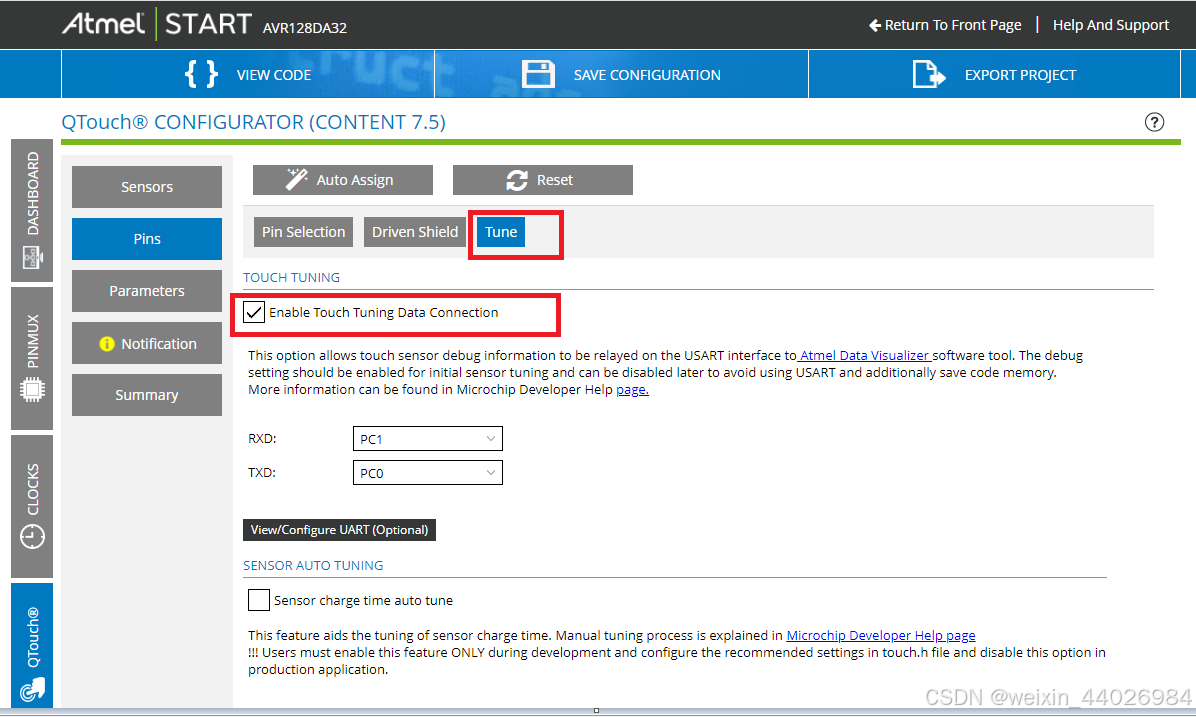
11、然后点击Tune,勾选Enable Touch框
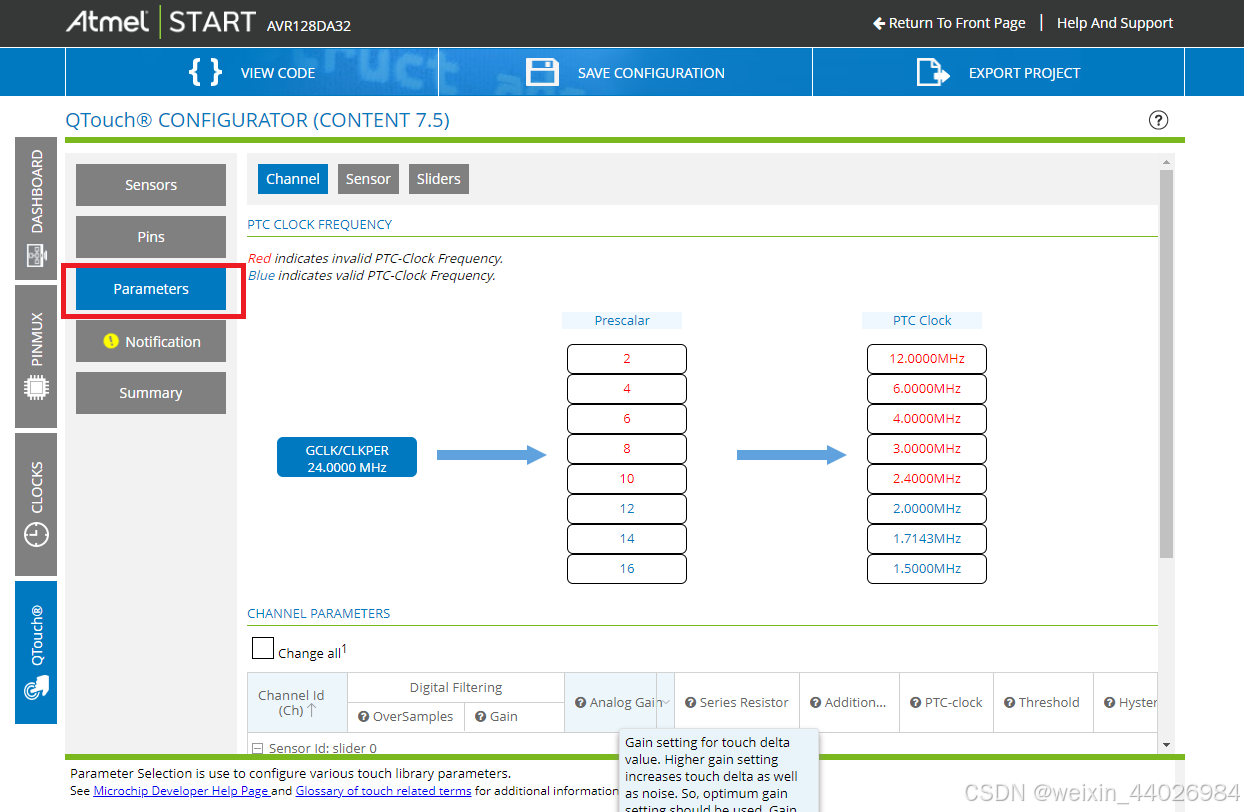
12、然后点击Parameters框,会出现许多配置的参数,这些参数第一次见不理解是很正常的,这些可以先不进行配置,就按照默认的设置来处理。默认的配置基本是已经可以实现触摸的一个功能了,后续可以根据实际的情况再在代码中配置相应的参数。
!!!特别需要提醒的是,在现在这个页面所有的参数,在后面生成的工程中的touch.h文件中都可以进行配置,所以后续可以再代码中进行配置
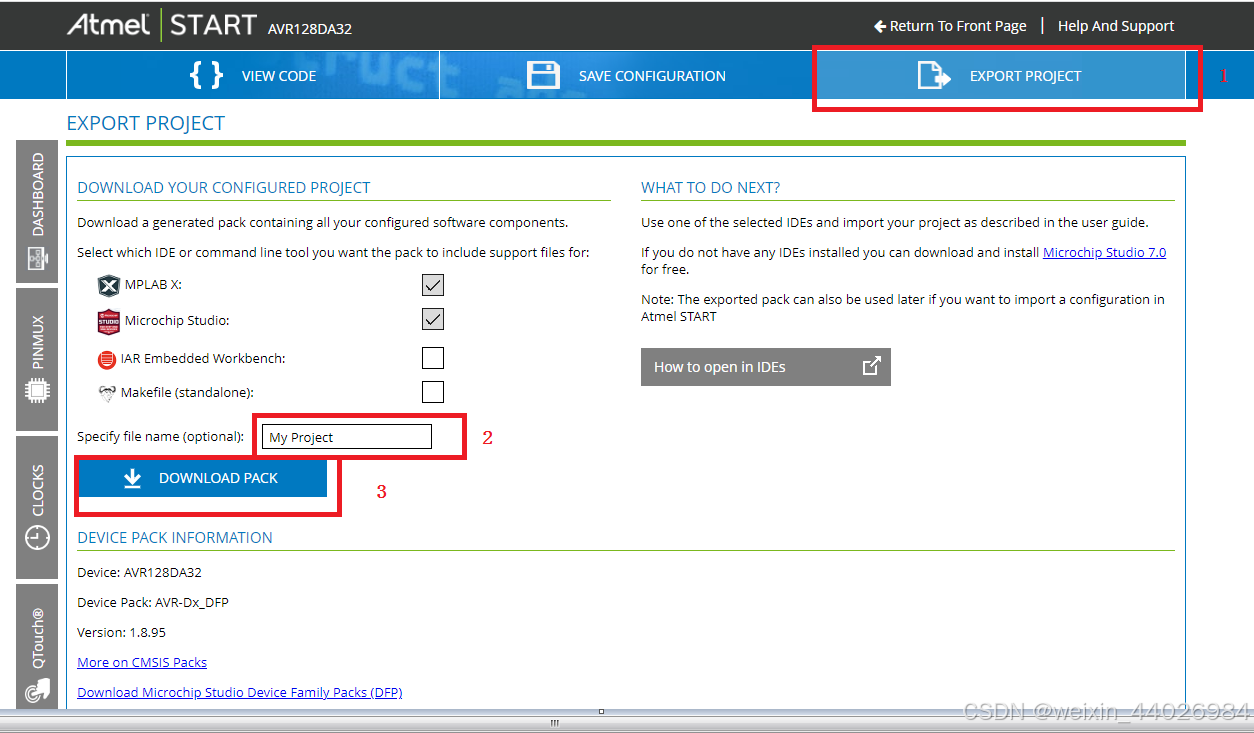
13、参数按照默认配置的话后面就可以导出工程了,点击下图1,出现下面这个页面,因为我用的是MPLAB软件,所以已经默认勾选了,图中2是导出工程的名字,大家可以选择是否更改,然后点击3,就可以下载工程了。
打开工程

上图是我生成的工程,打开这个工程的话,首先打开MPLAB X软件,点击FIle后如下图
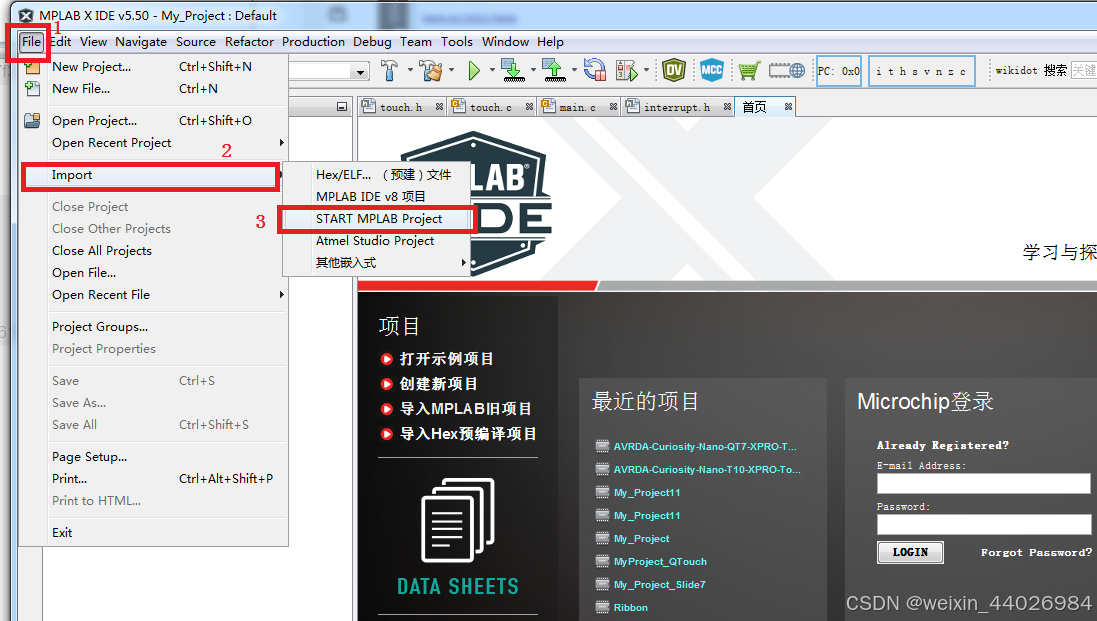
然后后面就选择工程点击Next就好了,唯一需要注意的是,在选择器件的时候,看看自己是用什么仿真调试代码,因为我是使用PICkit4来进行仿真的,所以我就在Tool选项选择了PICkit 4,如果找不到PICkit4选项,那么就把Show All框勾选上。
小结
触摸工程就到此生成结束了,因本人能力有限,如果有描述不当的地方欢迎大家提出,我再做修改。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









