







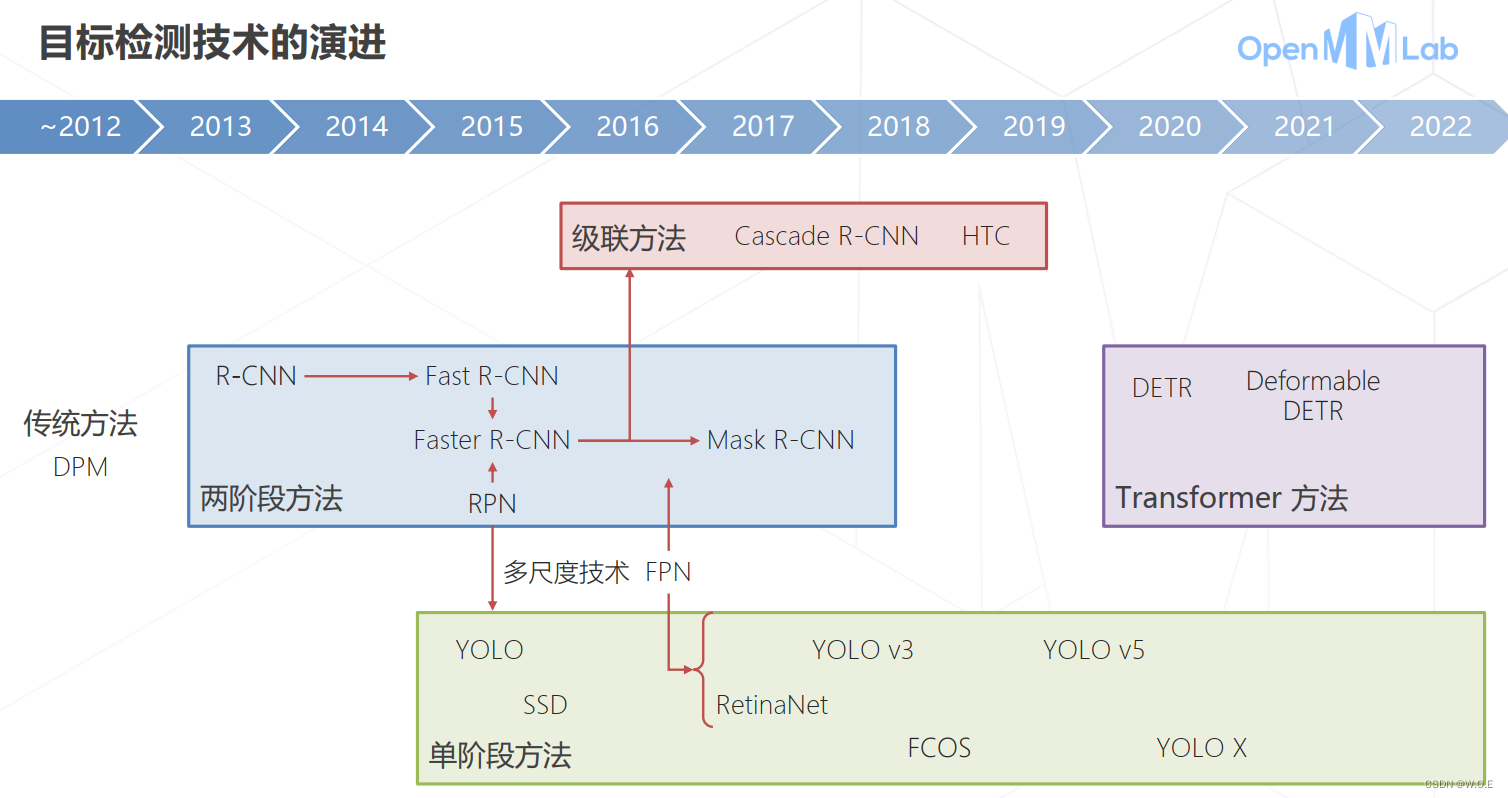
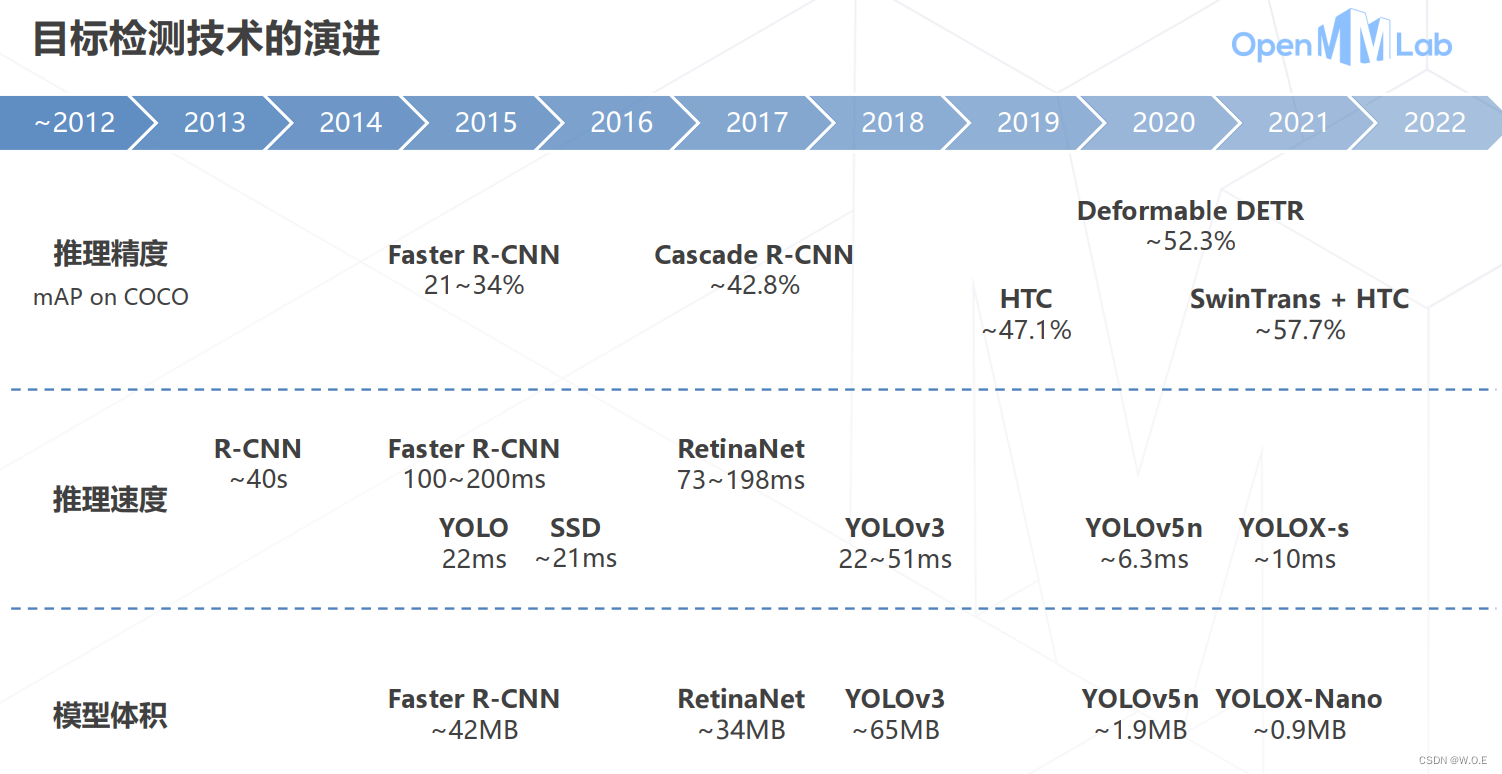
目标检测技术的演进
基础知识
- 边界框(Bounding Box)
- 区域(Region):框的同义词
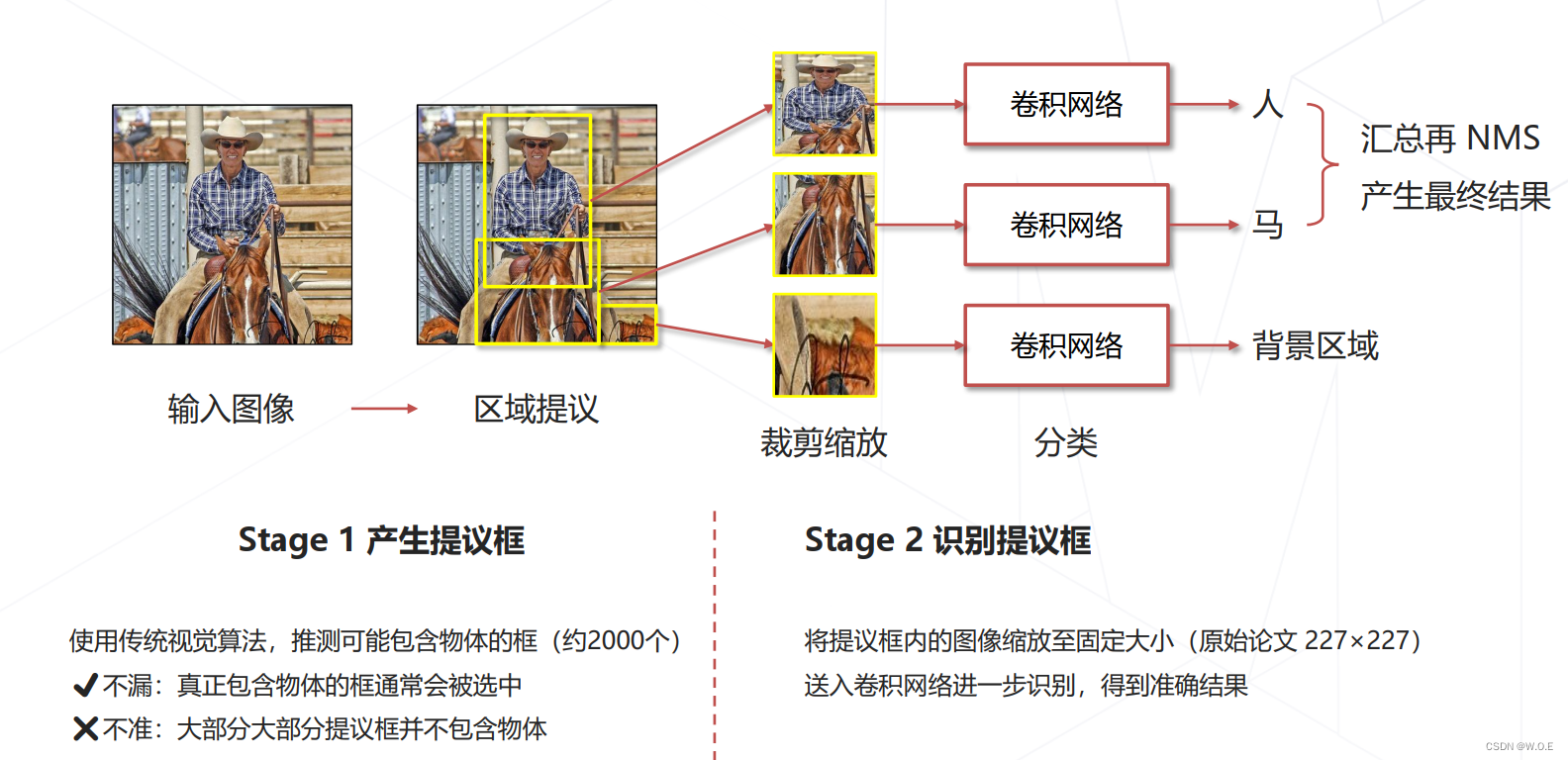
- 区域提议(Region Proposal, Proposal):指算法预测的可能包含物体的框,某种识别能力不强的算法的初步预测结果
- 感兴趣区域(Region of Interest, RoI):当我们谈论需要进一步检测这个框中是否有物体时,通常称框为感兴趣区域
- 锚框(Anchor Box, Anchor):图中预设的一系列基准框,类似滑窗,一些检测算法会基于锚框预测边界框
- 交并比 Intersection Over Union
交并比(IoU)定义为两矩形框交集面积与并集面积之比,是矩形框重合程度的衡量指标
- 置信度 Confidence Score
模型认可自身预测结果的程度,通常需要为每个框预测一个置信度,人们倾向认可置信度高的预测结果
- 非极大值抑制 Non-Maximum Suppression
滑窗类算法通常会在物体周围给出多个相近的检测框,这些框实际指向同一物体,只需要保留其中置信度最高的
- 边界框回归 Bounding Box Regression
让模型在预测物体类别同时预测边界框相对于滑窗的偏移量
- 边界框编码 Bbox Coding
边界框的绝对偏移量在数值上通常较大,不利于神经网络训练,通常需要对偏移量进行编码,作为回归模型的预测目标
两阶段目标检测算法
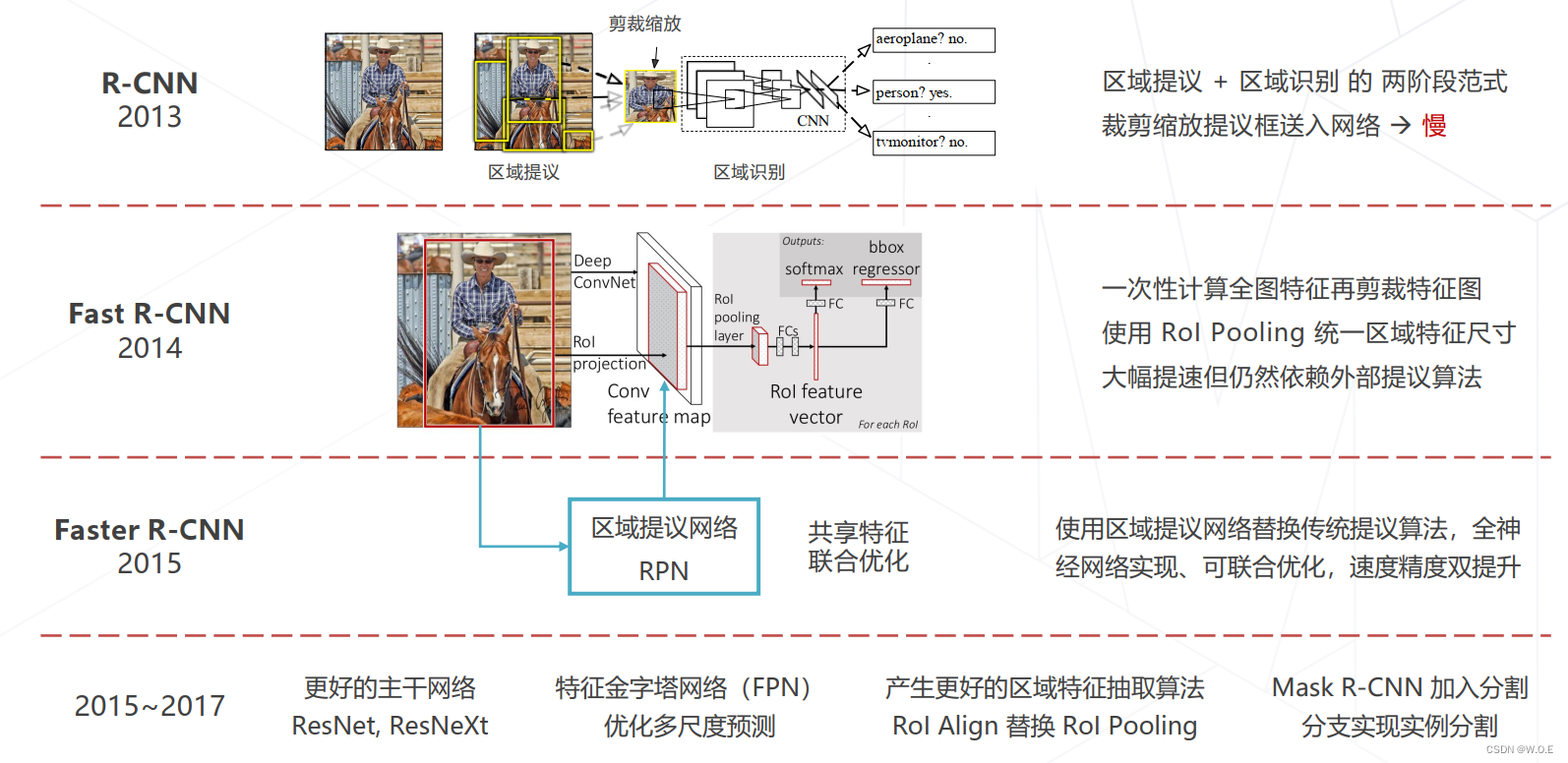
- Region-based CNN (2013)
- Fast R-CNN (2014)
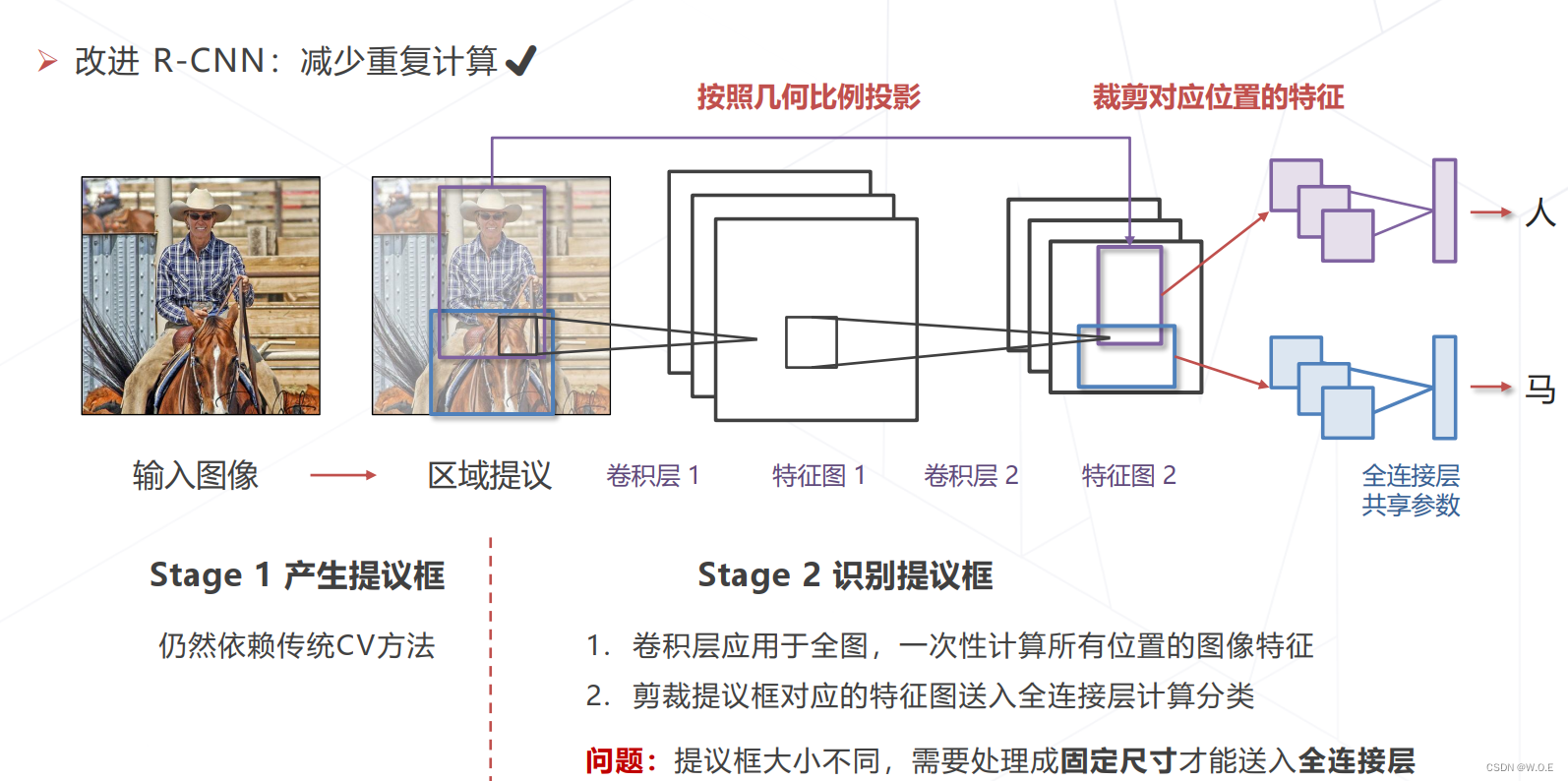
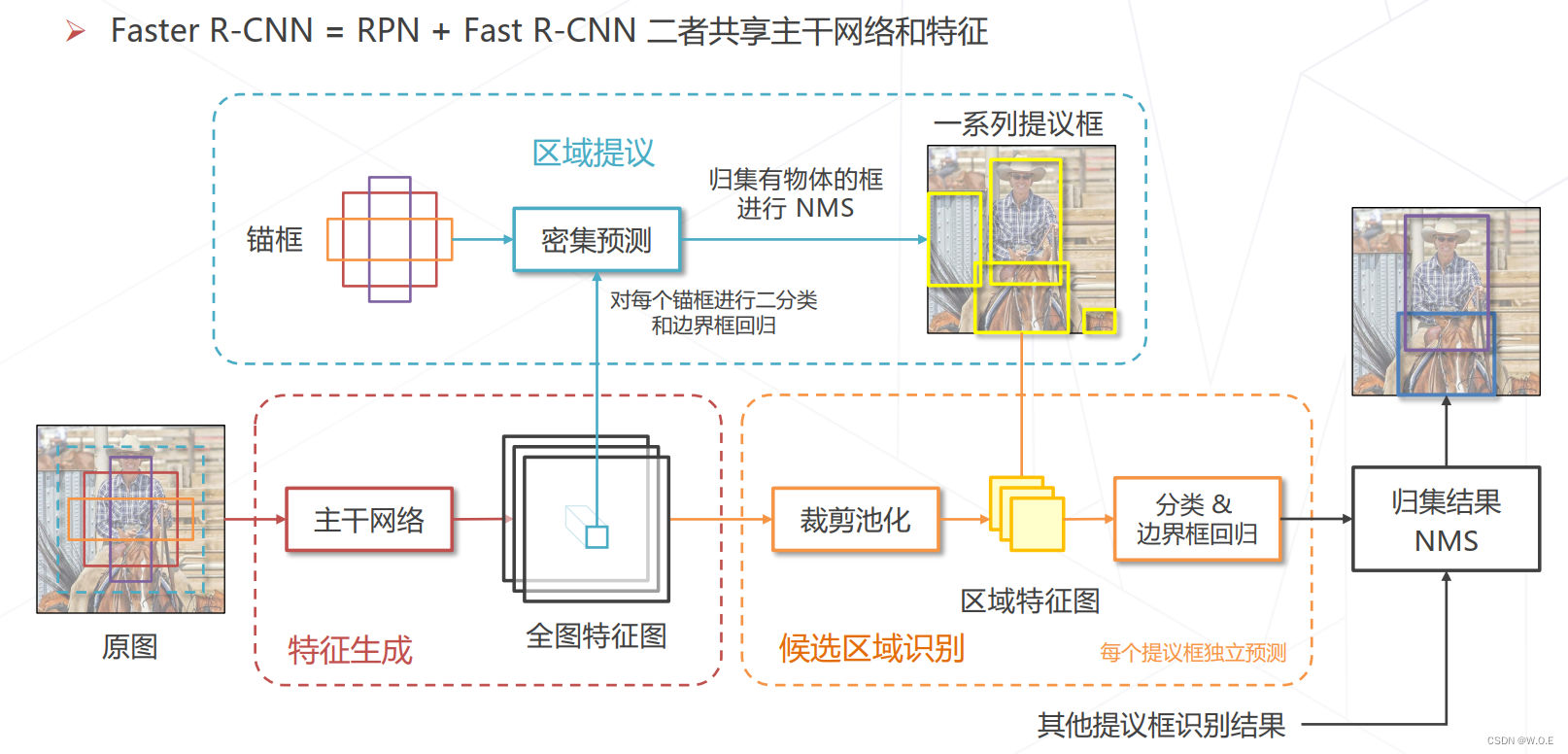
- Faster R-CNN (2015)
- 两阶段方法的发展与演进 (2013~2017)
多尺度检测技术
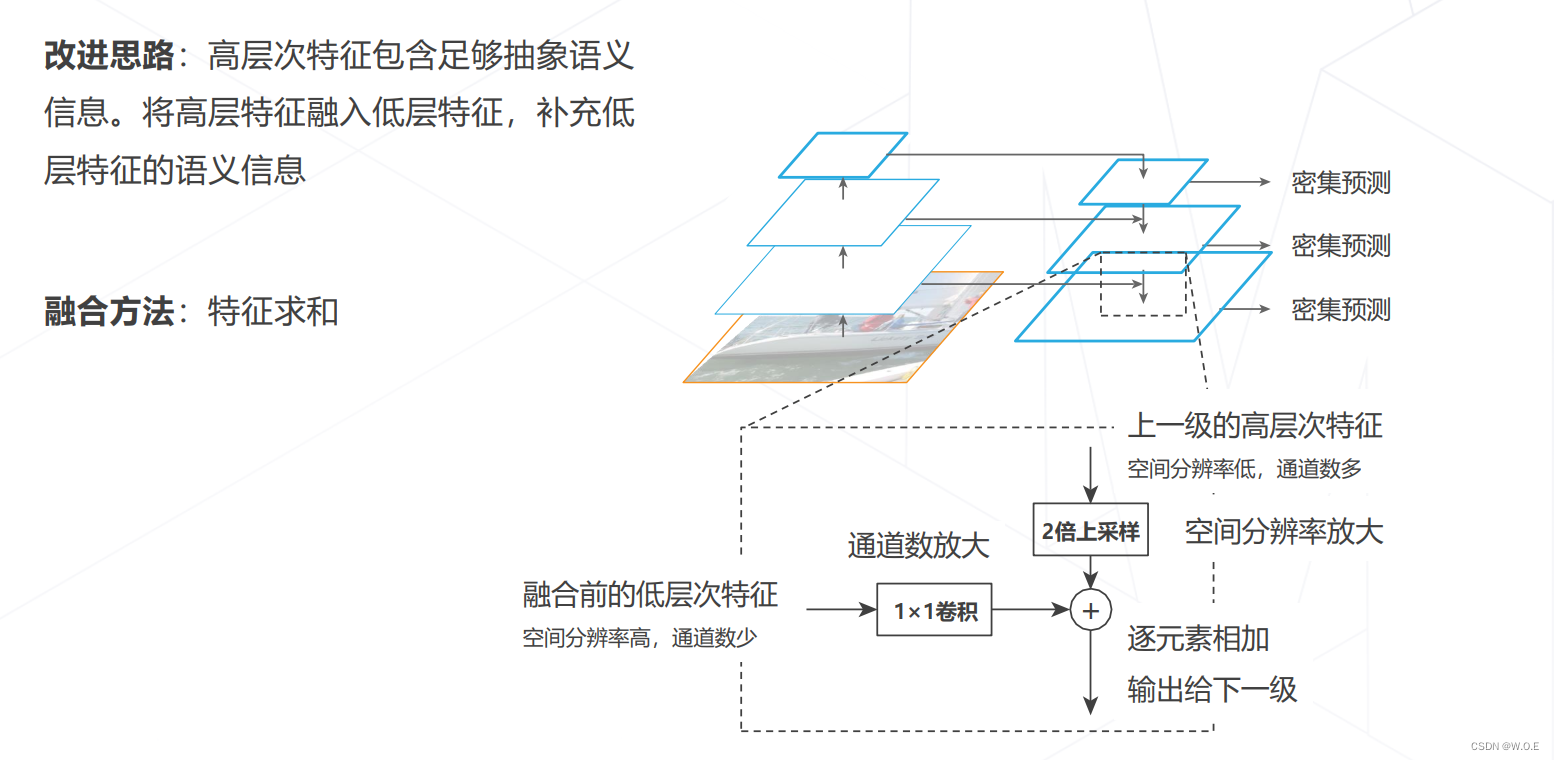
- 特征金字塔网络 Feature Pyramid Network (2016)
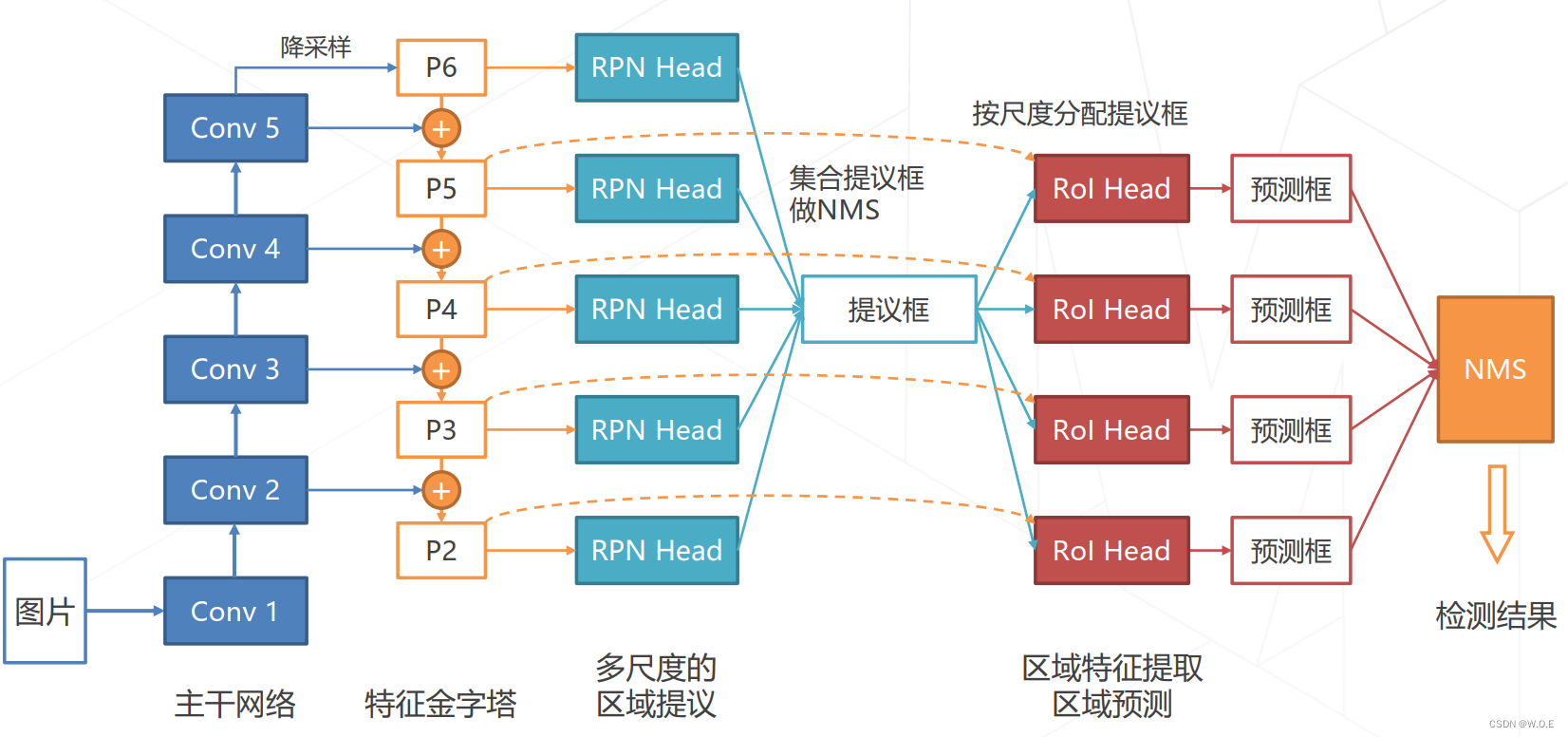
- 在 Faster R-CNN 模型中使用 FPN
单阶段目标检测算法
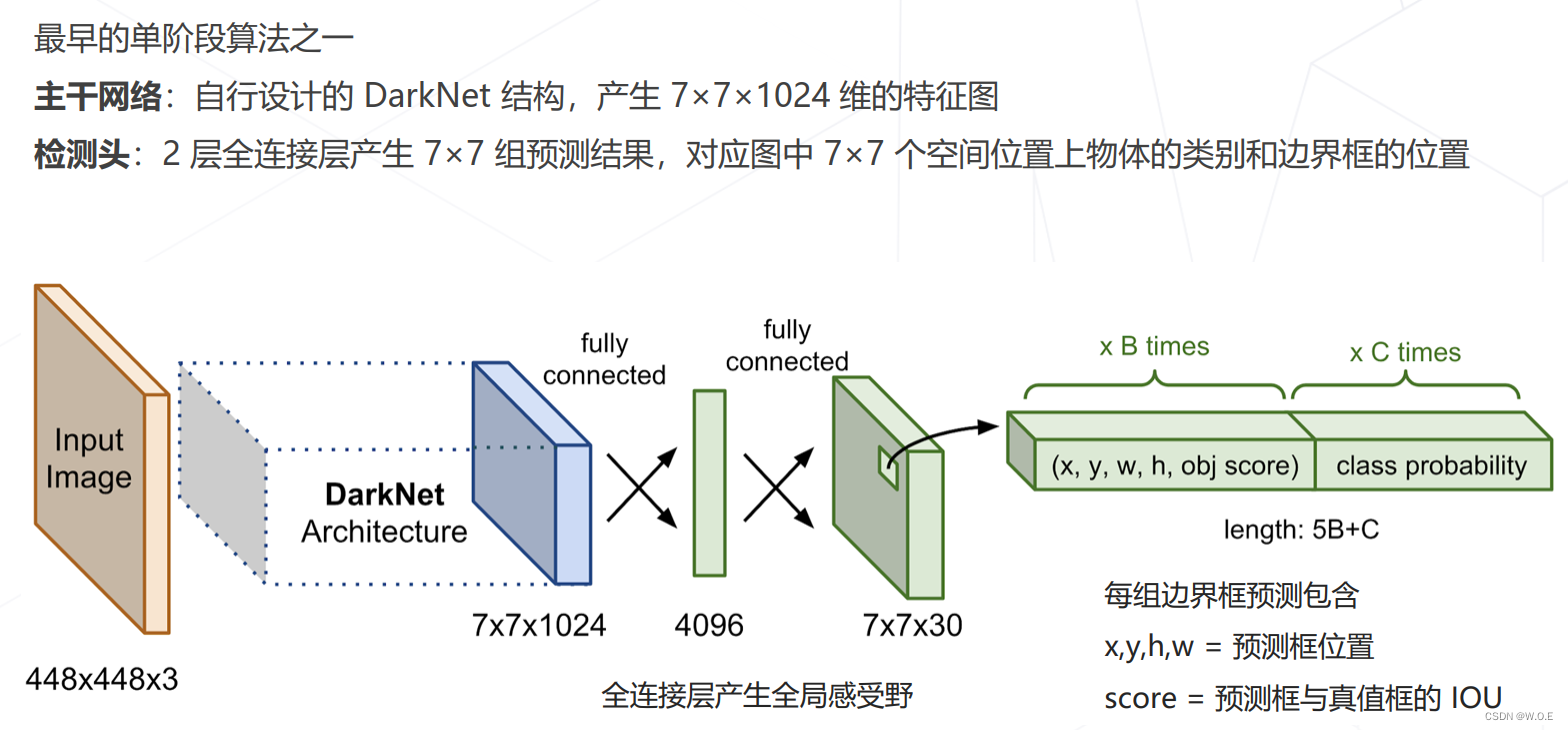
- YOLO: You Only Look Once (2015)
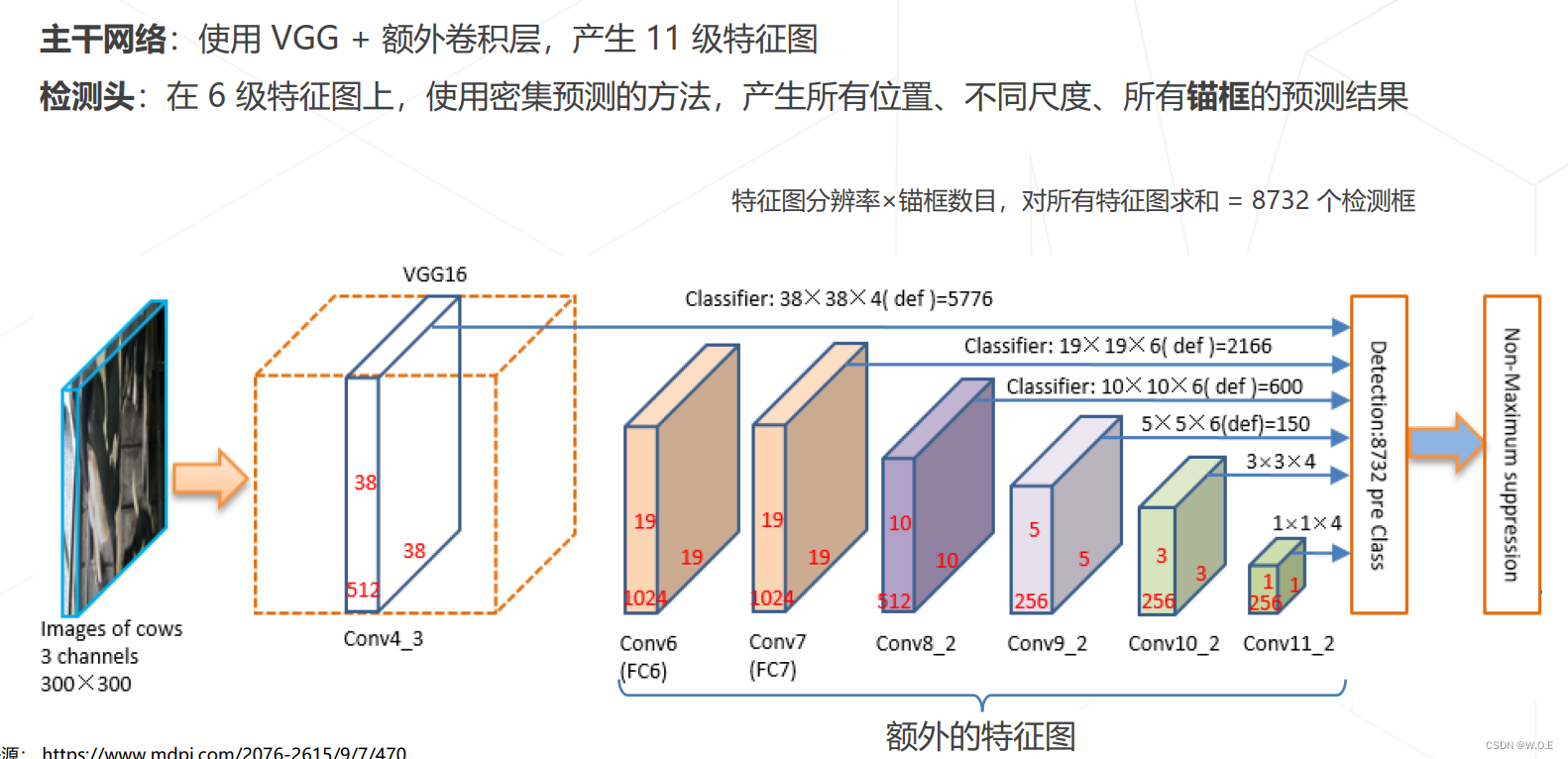
- SSD: Single Shot MultiBox Detector (2016)
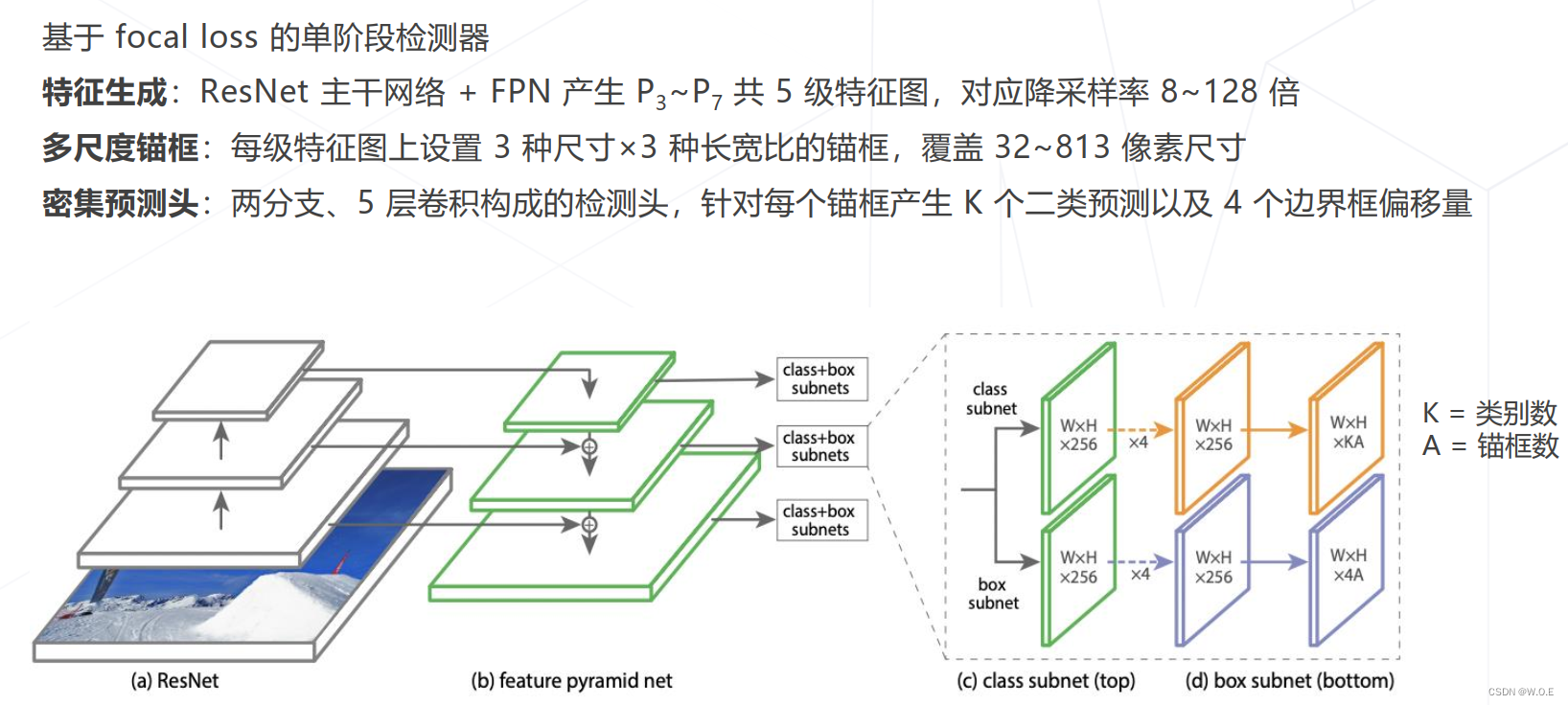
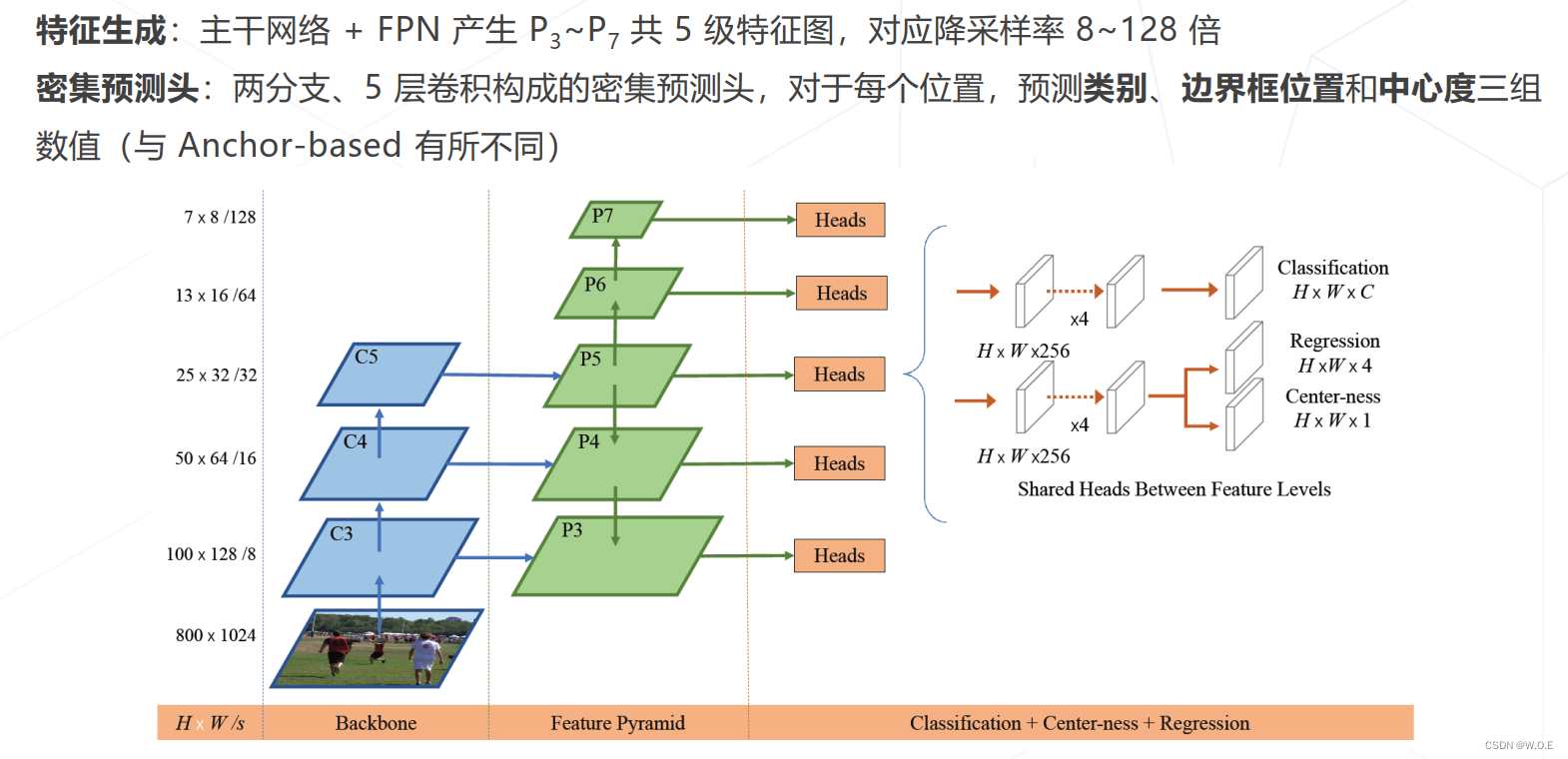
- RetinaNet (2017)
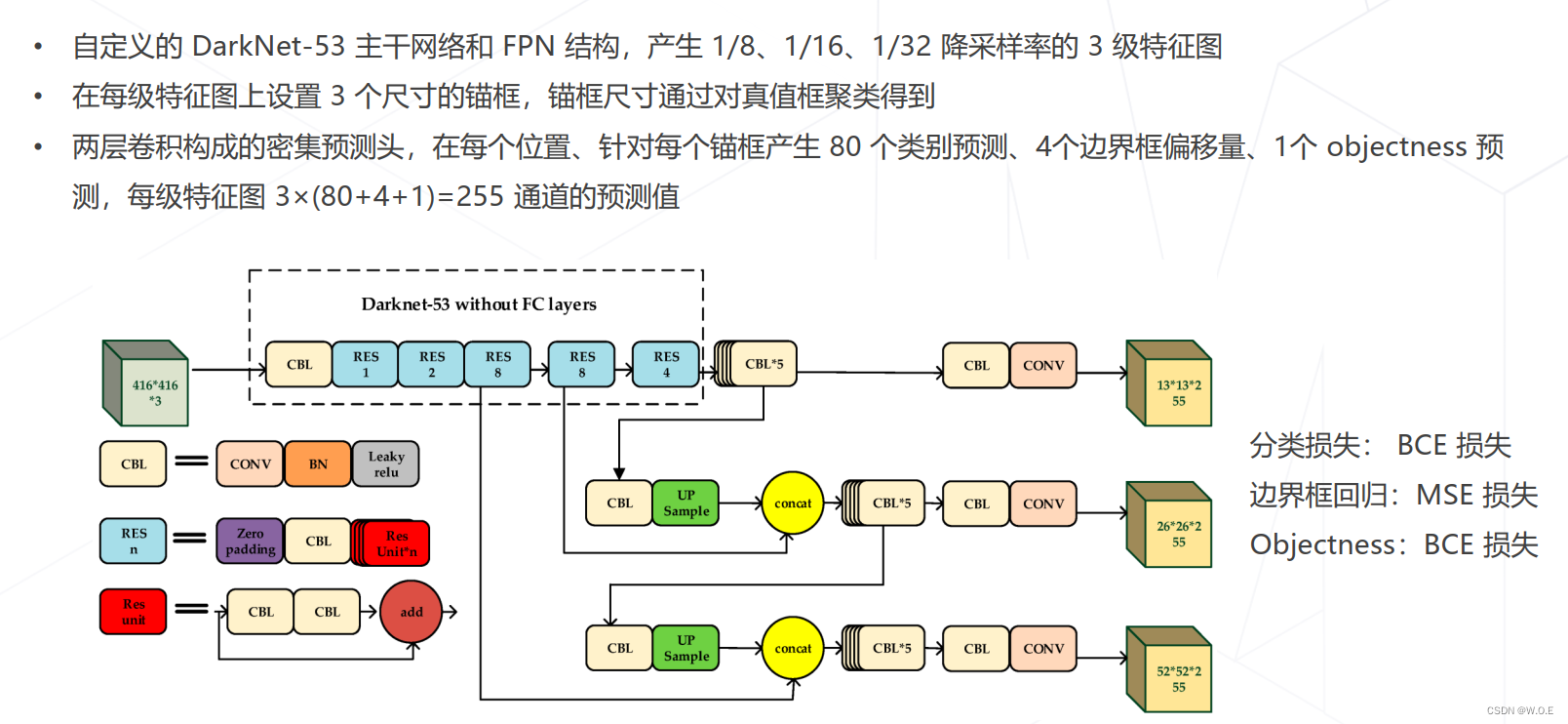
- YOLO v3 (2018)
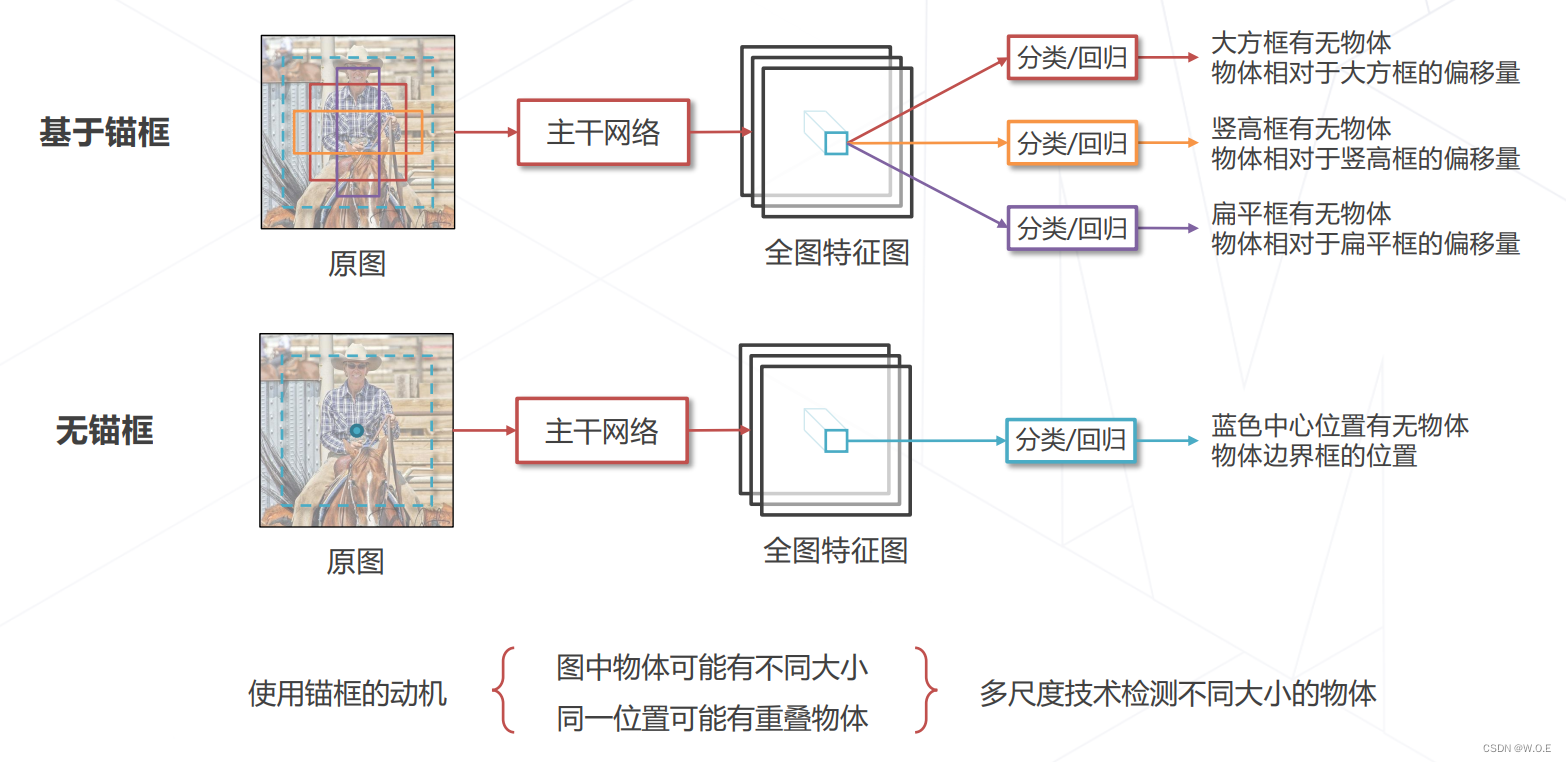
无锚框目标检测算法
- 锚框 vs 无锚框
- FCOS, Fully Convolutional One-Stage (2019)
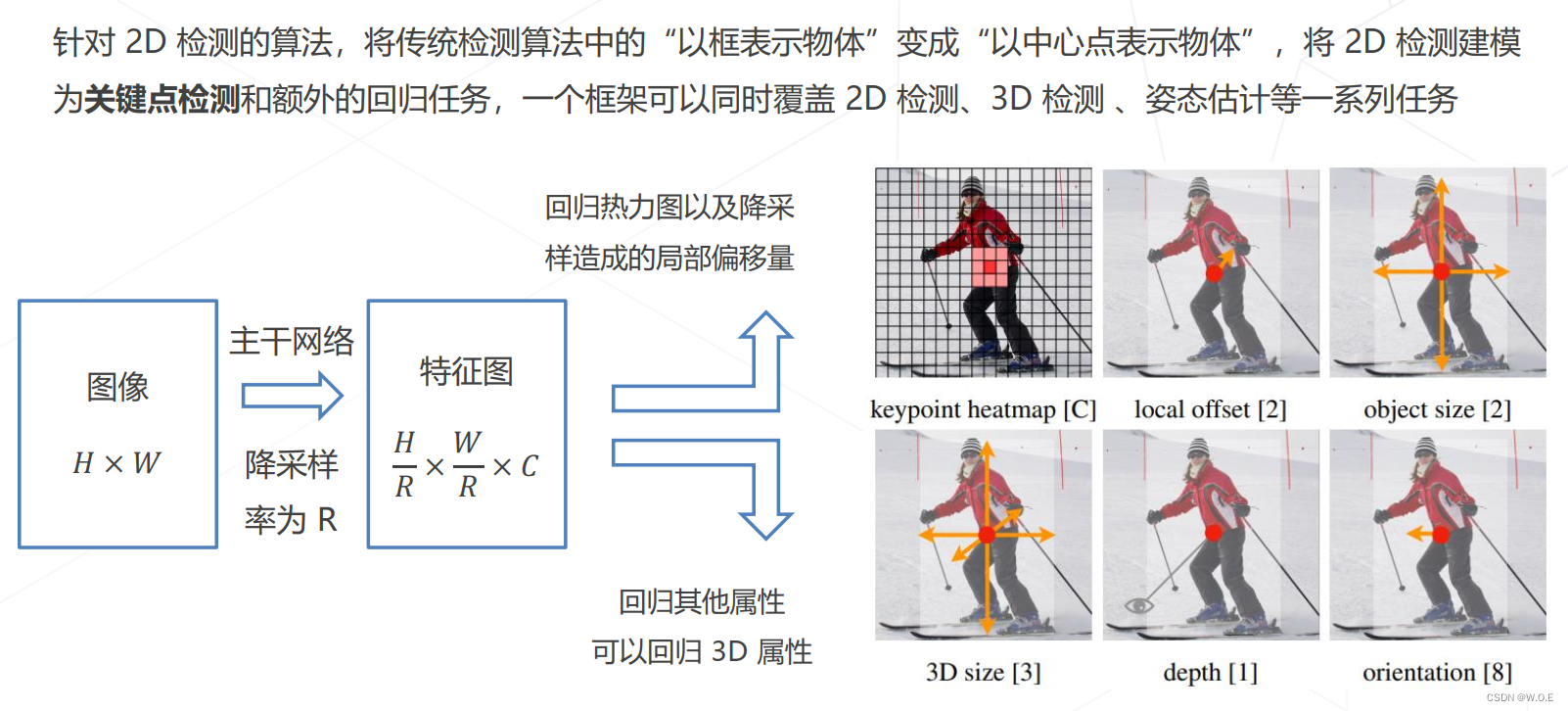
- CenterNet (2019)
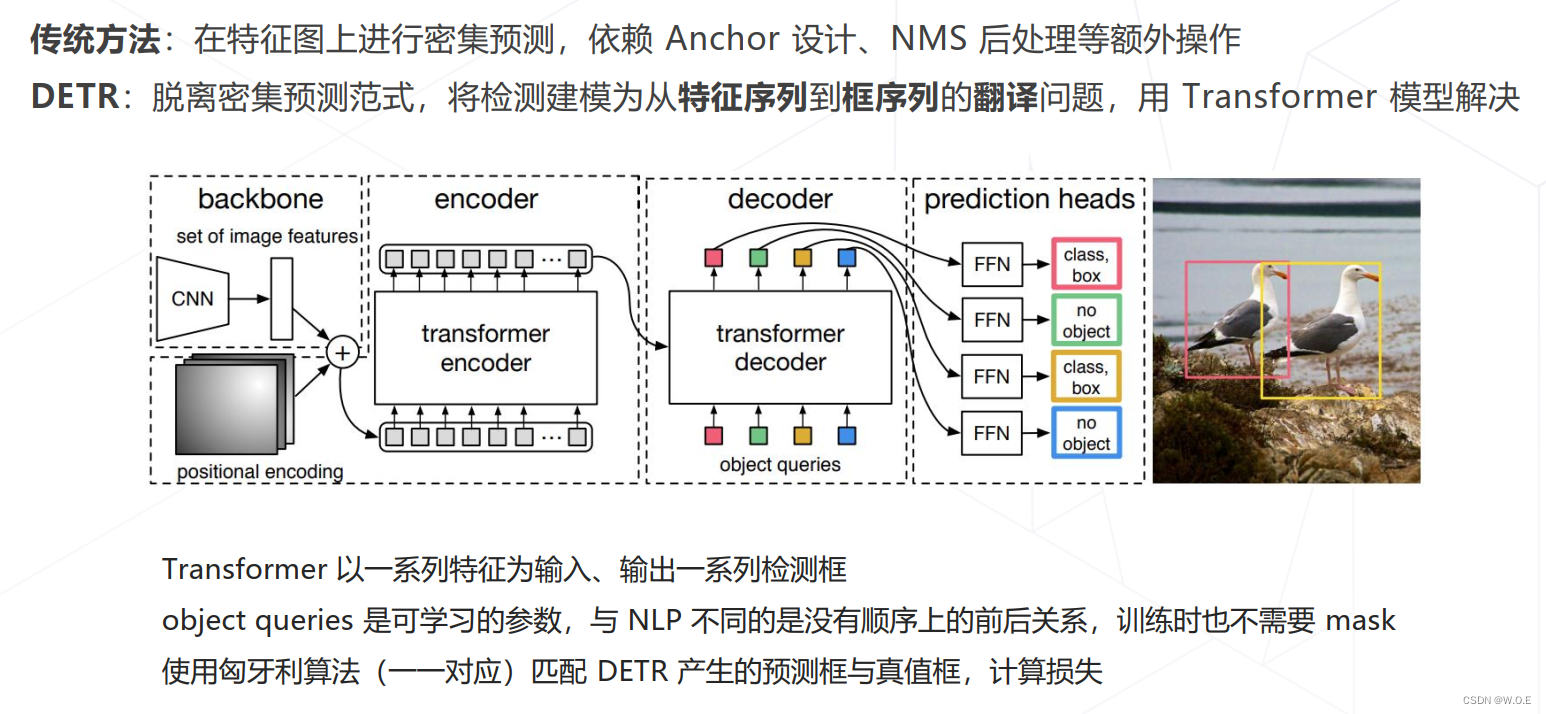
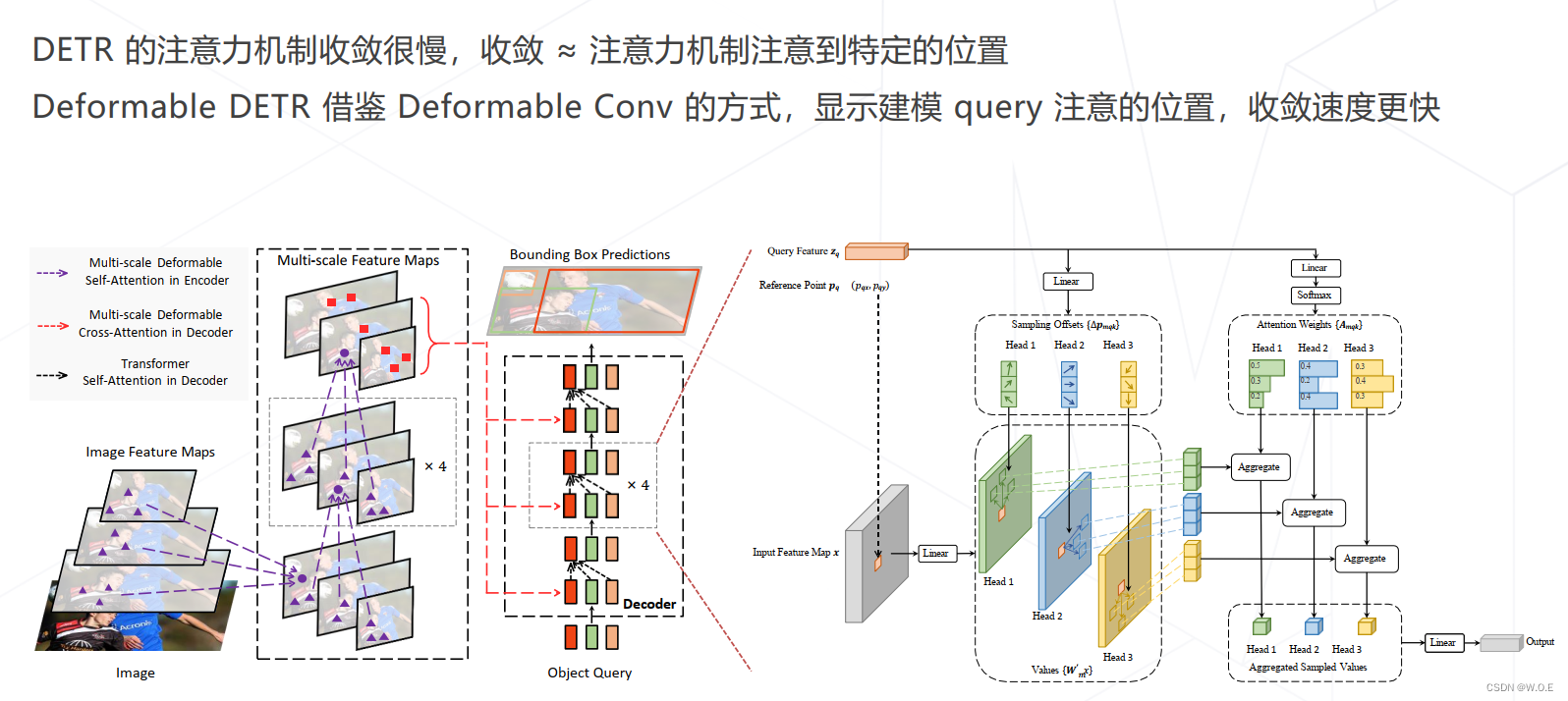
Detection Transformers
- DETR (2020)
- Deformable DETR (2021)
目标检测模型的评估方法
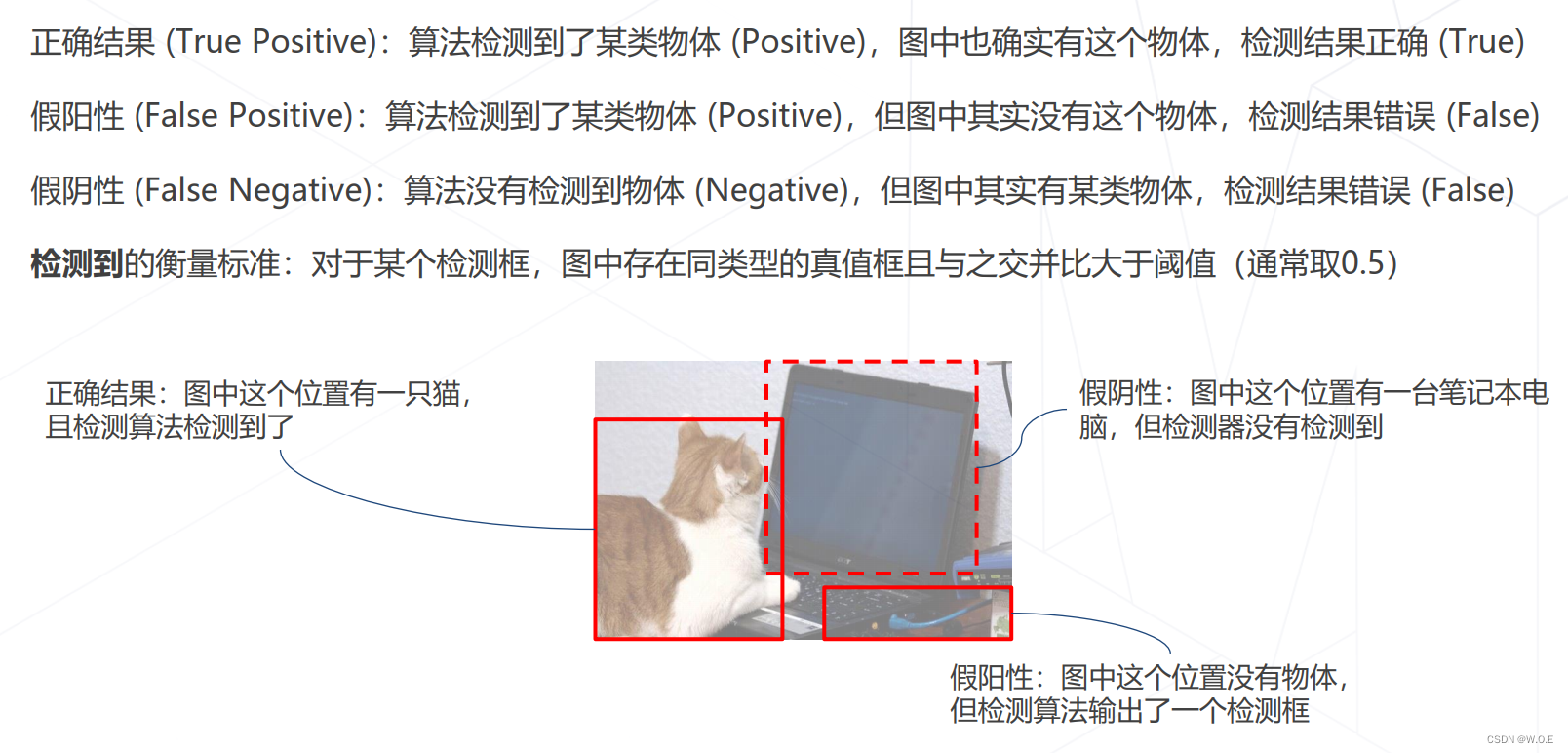
- 检测结果的正确/错误类型
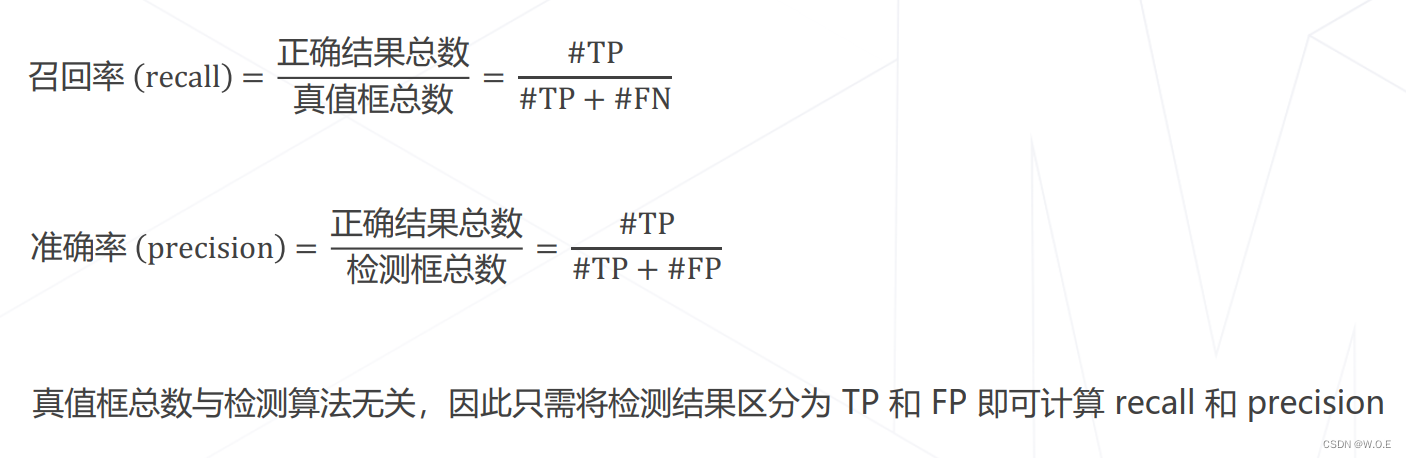
- 准确率 Precision 与 召回率 Recall
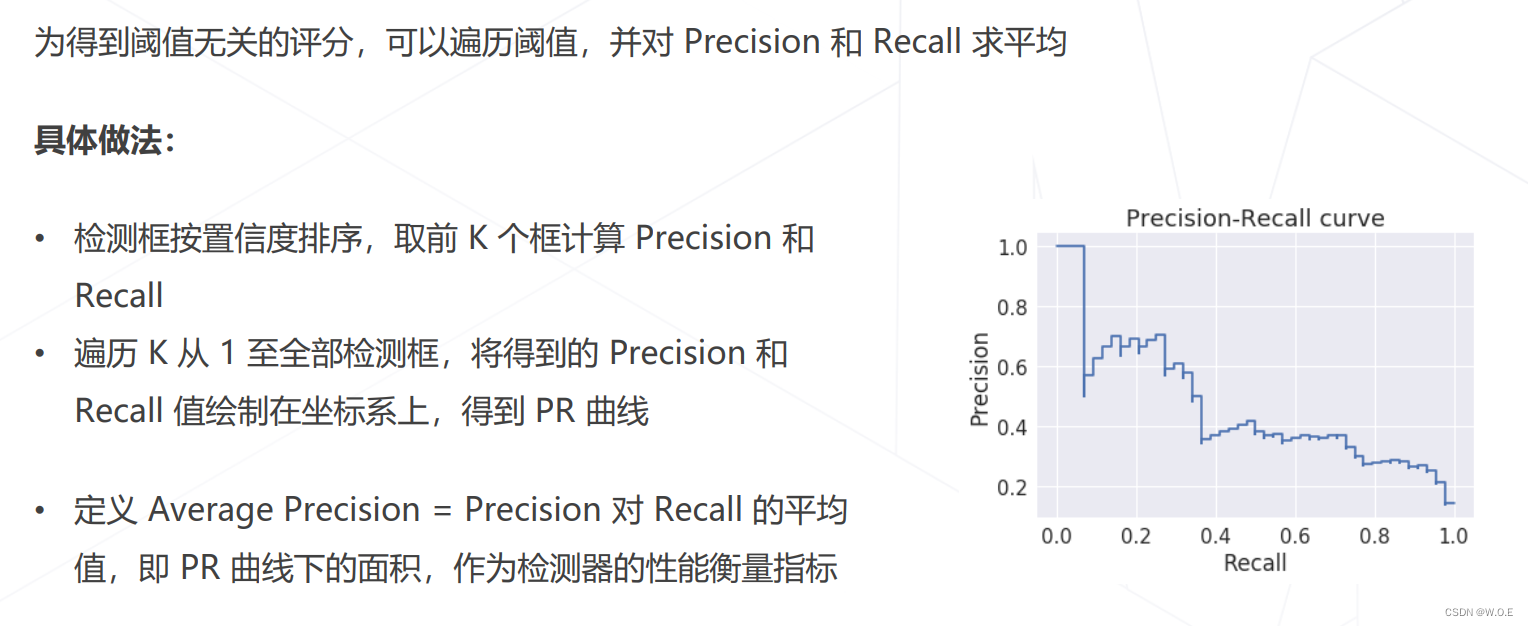
- PR 曲线 与 AP 值
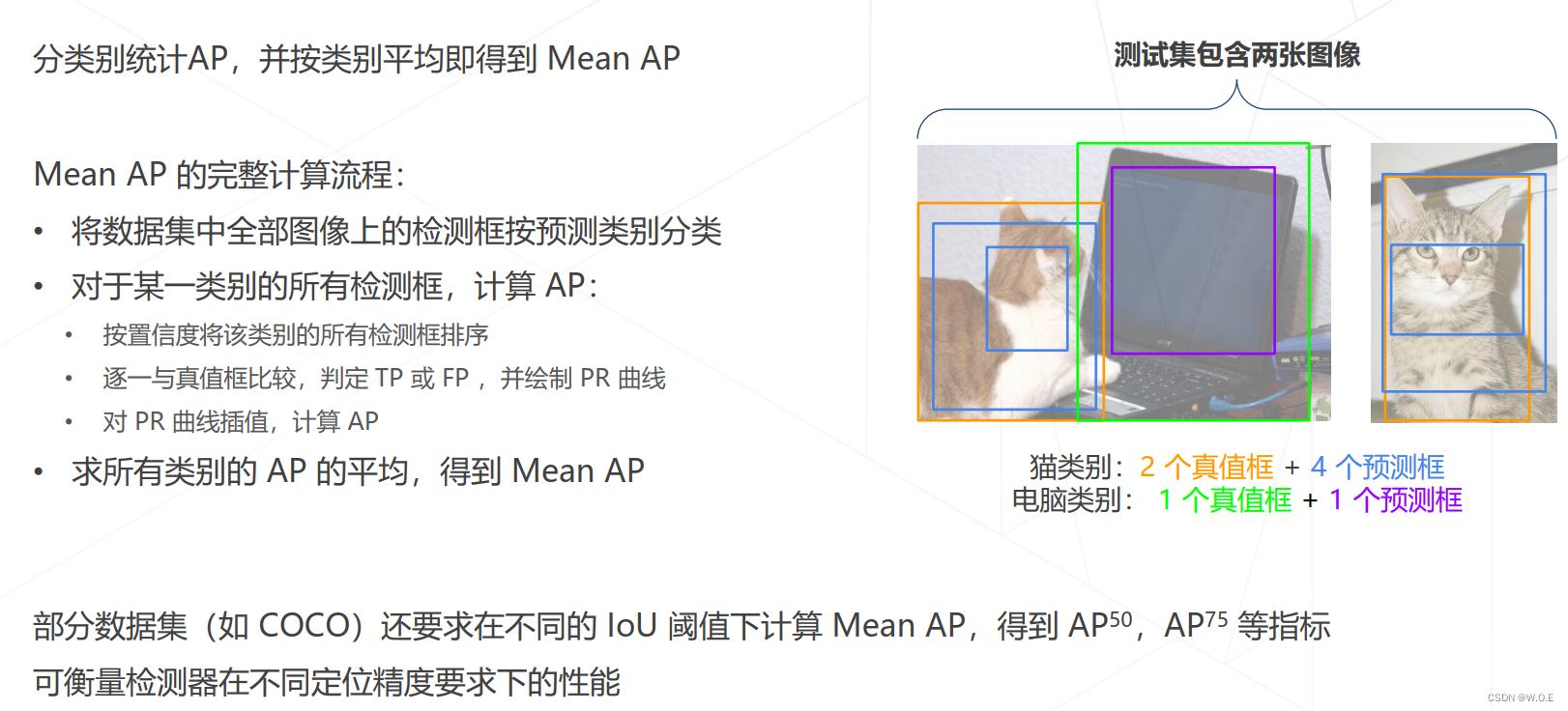
- Mean AP
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









