









数字图像处理第二章(第三版)总结
第2章 数字图像处理
2.1视觉感知要素
2.1.1人眼的结构
- 锥状体 :对颜色高度敏感,这种视觉称为白昼视觉或者亮视觉。高照明水平下执行。
- 杆状体 :没有彩色感觉,对低照明度敏感,称为暗视觉或微光视觉。低照明水平下执行。
2.1.2眼睛中图像的形成
2.1.3亮度适应和辨别
- 亮度适应现象 :视觉系统不能同时在一个范围内工作,它是通过改变其整个灵敏度来完成这一较大变动的。
- 韦伯比 : 较大:亮度辨别能力较差;反之,较好。
- 视觉系统往往会在不同强度区域的边界处出现“下冲”或“上冲”现象。
- 同时对比、错觉
2.2光和电磁波谱
- 电磁波是能量的一种,任何有能量的物体都会释放电磁波谱。它可以用 波长 (λ)、频率(v)或能量(E) 来描述,其中
λ=c/v
E=hv - 光是一种特殊的电磁辐射,可以被人眼感知。
- 单色光 是没有颜色的光,也成为无色光。唯一属性就是它的强度或者大小,用 灰度级 来表示。单色图像常被称为 灰度图像 。
- 彩色光源 的质量可以用发光强度、光通量和亮度 来表示。
2.3图像感知和获取
2.3.1使用单个传感器获取图像
2.3.2使用条带传感器获取图像
2.3.3使用列阵传感器获取图像
2.3.4简单的图像形成模型
用形如 f(x,y)的二维函数来表示图像,那么: 0<f(x,y)<∞。
f(x,y)可以用两个分量来表征:
- 入射分量 :入射到被观察场景的光源照射总量,用i(x,y)
表示; - 反射分量 : 场景中物体所反射的光照总量,用r(x,y)
表示。 - 反射分量限制在 0(全吸收)和 1(全反射)之间。i(x,y)的性质取决于照射源,而r(x, y)的性质取决于成像物体的特性。
所以:f(x,y)=i(x,y)r(x,y),0<i(x,y)<∞,0<r(x,y)<1
2.4图像取样和量化
2.4.1取样和量化的基本概念
- 取样 :对坐标值进行数字化
- 量化 :对幅值数字化
- 数字图像的质量在很大程度上取决于取样和量化中作用到的 样本数和 灰度级。
2.4.2数字图像显示
- 令f(s, t)表示一幅具有2个连续变量s和t的连续图像函数,x和y分别对应图像二维阵列的行和列。x和y称为空间变量或空间坐标。第三个坐标是空间变量x和y为函数的f(灰度)值。
- 我们甚至可以将一幅图表示成一个向量。以原二维阵列按列排序,变成一个MN * 1的向量。
- 出于存储和量化硬件的考虑,灰度级数通常取为2的整数次幂,即L = 2k
- 动态范围 :系统中最高灰度级和最小灰度级之比。
- 图像对比度 :最高和最低灰度级间的灰度差定义为对比度。
- 存储数字图像所需的比特数b为:b = M * N * k,当M=N时,该式变成b = N2k。当一幅图像有2k个比特数时,称该图像为一幅“k比特图像”。
2.4.3空间和灰度分辨率
- 空间分辨率:图像中可辨别的最小细节的度量。在数量上,表示每单位距离线对数和每单位距离的点数是最通用的度量(必须针对空间单位来规定才有意义)。
- 灰度分辨率:指在灰度级中可分辨的最小变化。
- 300dpi是书籍印刷所用的最小空间分辨率。
- 通过等偏爱曲线,对于有大量细节的图像,可能只需要较少的灰度级。
2.4.4图像内插
用已知数据来估计未知位置的数据处理。是基本的图像重取样方法。可以处理图像的放大和缩小,这是基本的图像重取样方法,本质上,内插是用已知数据来估计未知位置数值的处理。
- 最邻近内插:在原图像中寻找最临近的像素,并把该像素的灰度赋给放大的新图像。
- 双线性内插 :用4个最邻近去估计给定位置的灰度。令(x, y)为我们想要赋以灰度值的位置,令v(x, y)表示灰度值,则:
v ( x , y ) = a x + b y + c x y + d v(x, y) = ax + by + cxy + d v(x,y)=ax+by+cxy+d - 双三次内插 :包括附近的16个最邻近点。
v ( x , y ) = ∑ i = 0 3 ∑ j = 0 3 a i j ∗ x i y j v(x,y)=\quad \sum_{i=0}^{3}\quad \sum_{j=0}^{3}{aij} *x^iy^j v(x,y)=i=0∑3j=0∑3aij∗xiyj - 双线性内插和双三次内插是人们选择的典型方法。
2.5像素间的一些基本关系
2.5.1邻接像素
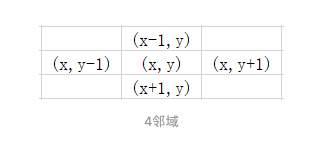
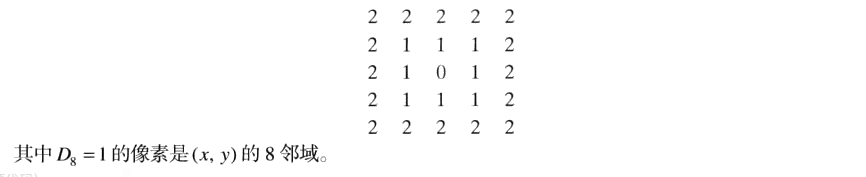
- 位于坐标 (x,y)处的像素 p有4个水平和垂直上的相邻像素,其坐标是(x+1,y), (x-1, y), (x, y+1), (x, y-1) 。这组像素称为p的4邻域,用 N4(p )表示。
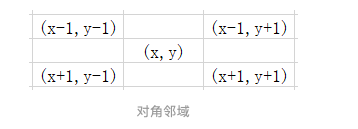
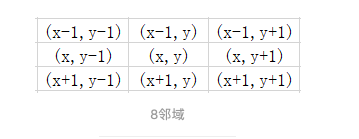
- p的4个对角相邻像素的坐标是:(x+1, y+1), (x+1, y-1), (x-1, y+1), (x-1, y-1)。用ND(p )表示。
这些点与4个邻点一起称为p的8邻域,用N8(p )表示。
- 如果 p位于图像边界,则某些邻点可能 落在图像外边。
2.5.2邻接性,连通性,区域和边界
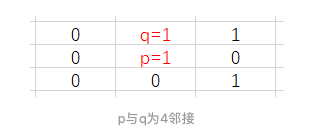
令V是用于定义邻接性的灰度值集合。V可能是灰度值范围0-255这256个值的任意一个子集。
-
4邻接:a.像素p,q都在V中。 b.如果q在p的4邻域中(如果q在集合N4(p )中)。那么称p和q是4邻接的。
-
8邻接:如果q在集合N8(p )中,那么称p和q是8邻接的。
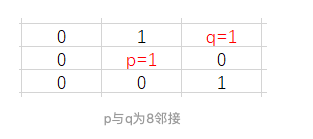
-
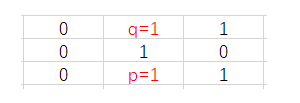
m邻接(混合邻接):满足(1)q在N4(p ),(2)q在N8(p )中,且集合N4(p )和N8(p )的交集没有来自V中的数值的像素,则p和q是m邻接的。
-
混合邻接的引入是为了消除采用8邻接时产生的2义性。

-
通路:从具有坐标(x,y)的像素p到具有坐标(s,t)的像素q的特定像素序列称为通路,像素序列的坐标为:(x0,y0),(x1,y1),……(xn,yn)。其中(x0,y0)=(x,y),(xn,yn)=(s,t),且像素(xi,yi)和(xi-1,yi-1)对于1≤i≤n是邻接的。
- 4通路:在下图中,从p到q为4通路。
-8通路:

-m通路:

- 4通路:在下图中,从p到q为4通路。
-
连通:令S是图像中的一个像素子集,若S的全部像素之间存在一个通路,则可以说S中的两个像素p和q在S中是连通的。也就是说,S中任意2个像素之间都存在一条路可以连通,那么就代表S中的两个像素p和q在S中是连通的。
-
连通分量:对于S中的任何像素p,S中连通到该像素的像素集称为连通分量。
-
连通集:若S只有一个连通分量,则集合S称为连通集。
-
区域:令R是图像的一个像素子集,如果R为连通集,则称R为一个区域。
-
邻接区域:两个区域,如果它们联合形成一个连通集,则区域Ri和Rj称为邻接区域。
-
在谈到区域时,必须指定邻接的类型,比如是4邻接还是8邻接!!!!!
-
内边界:该区域中和其背景相邻接的点的集合。
-
外边界:对应于背景边界。

内边界为1的最外一层,而外边界则是0的最里面一层,可以简单的这么理解。
2.5.3距离度量

2.6数字图像处理中所用数学工具的介绍
2.6.1阵列与矩阵操作
- 在对一幅图像或者多幅图像操作时,要首先明白是列阵操作还是矩阵操作。以2*2图像为例:

- 图像求幂意味着每个像素均进行求幂;同样,一幅图像除以一幅图像时,意味着对应像素之间相除。
2.6.2线性操作与非线性操作

2.6.3算术操作
- 图像间的算术操作是阵列操作,即算术操作在相应的像素对之间执行。

- 几个利用算术操作处理图像的例子:
- 利用带噪图像的相加(平均)进行降噪处理。
- 利用图像相减增强差别。
- 利用图像相乘和相除来校正阴影。
2.6.4集合和逻辑操作
- 一些常见的集合操作在这里就不意义赘述,下面我们来看看图像中的集合操作。
- 我们一般将全集定义为包含图像中所有像素的正方形。
- 灰度值的并集操作和交集操作通常定义为像素对的最大和最小。而补集操作定义为常数与图像中每个像素的灰度间的两两之差。(常数为2k-1)。
- 灰度图像的逻辑操作:AND(相当于交集), OR(相当于并集), NOT(相当于补集), XOR(相当于AB的并集去掉AB的交集)。
2.6.5空间操作
空间操作直接在给定图像的像素上进行!
- 单像素操作:
s = T(z)
z是原图像中像素的灰度值,s是处理后图像中相应像素的灰度。 - 邻域操作:
与单像素操作类似,Sxy代表图像f中任意一点(x, y)为中心的邻域集,邻域处理是在Sxy内的像素经指定操作后输出到另一图像相同坐标处,形成新图像g。 - 几何空间变换(橡皮膜变换)和图像配准:
几何空间变换主要由两个基本操作组成:(1)坐标的空间变换;(2)灰度内插,即对空间变换后的像素赋灰度值; - 最常用的空间坐标变化之一是仿射变换:
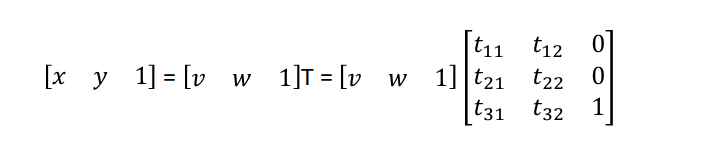
其中(v, w)是原图像中像素的坐标,(x, y)是变换后图像中像素的坐标。
基于上式,改变T的值,可以实现恒等变换、尺度变换、旋转变换、平移变换、垂直偏移变换、水平偏移变换。
下面是一些常用的变换:

- 事实上,我们可以用两种基本方式来使用仿射变换的公式,一种是前向映射,一种是反向映射。对于实现来说,反向映射比前向映射更有效。
- 图像配准:用于对齐两幅或者多幅相同场景的图像。使用参考图像的约束点,然后用约束点配准这两幅图像。
x = c1v + c22 + c3vw + c4
y = c5v + c62 + c7vw + c8
2.6.6向量与矩阵操作
多光谱图像处理是使用向量和矩阵操作的典型领域。
因为每一个RGB图像的每个像素都有3个分量,这些分量可组织成一个列向量的形式:
z = [z1 z2 z3 ]T
z1 z2 z3 分别代表红绿蓝像素的亮度。
这样,大小为M*N的RGB彩色图像就可以使用这一大小的3个分量图像来表示,或总共用MN个三维向量来表示。
- 一个像素向量z和任意点a在n维空间的欧式距离D可以用一个向量积来定义:
D(z, a)=[(z-a)T(z-a)]1/2=[ (z1- a1)2+…+( zn- an)2]1/2 - 向量像素的另一个优点就是线性变换。
w=A(z-a)
2.6.7图像变换


2.6.8概率方法
















 855
855











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









