







文章目录
线性空间.
- 英文名词为 Vector Space,因此其更准确的名称是向量空间。
- 向量空间形式化定义如下,关于其中的陌生名词会以Digression的形式简单解释。
- 设 V V V 为非空集合, P P P 为域,在 V V V 中定义运算"向量加法" V + V → V V+V→V V+V→V:对 a , b ∈ V a,b∈V a,b∈V 按照确定法则唯一对应于 V V V 中的元素 a + b a+b a+b;在 P , V P,V P,V 的元素间定义运算"标量乘法" P × V → V P×V→V P×V→V:对 a ∈ V , k ∈ P a∈V,k∈P a∈V,k∈P 按照确定法则唯一对应于 V V V 中的元素 k a ka ka,定义的两种运算需要满足下面八大条件。
- a + b = b + a a+b=b+a a+b=b+a
- a + ( b + c ) = ( a + b ) + c a+(b+c)=(a+b)+c a+(b+c)=(a+b)+c
- 存在一个元素 0 ∈ V 0∈V 0∈V 使得 a + 0 = a a+0=a a+0=a,称 0 0 0 为 V V V 的零元。
- 对于任意的 a ∈ V a∈V a∈V,都存在 b b b 使得 a + b = 0 a+b=0 a+b=0,称 b b b 为 a a a 的逆元素,记为 − a -a −a.
- P P P 中有单位元 1 1 1 使得 1 a = a 1a=a 1a=a
- 对于 k , l ∈ P k,l∈P k,l∈P 有 k ( l a ) = ( k l ) a k(la)=(kl)a k(la)=(kl)a
- 对于 k , l ∈ P k,l∈P k,l∈P 有 ( k + l ) a = k a + l a (k+l)a=ka+la (k+l)a=ka+la
- 对于 k ∈ P ; a , b ∈ V k∈P;a,b∈V k∈P;a,b∈V 有 k ( a + b ) = k a + k b k(a+b)=ka+kb k(a+b)=ka+kb
- 满足以上八大条件,则称 V V V 为域 P P P 上的一个线性空间,或向量空间。 V V V 中元素称为向量, V V V 的零元称为零向量, P P P 称为线性空间的基域。当 P P P 是实数域时, V V V 称为实线性空间;当 P P P 是复数域时, V V V 称为复线性空间。
【Digression-域】域是一种特殊代数系统,对于代数系统 < F , + , ⋅ > <F,+,·> <F,+,⋅> 而言,其中 < F , + > <F,+> <F,+> 是阿贝尔群, < F − 0 , ⋅ > <F-{0},·> <F−0,⋅> 是阿贝尔群,并且乘法 ⋅ · ⋅ 对加法 + + + 可分配,那么 < F , + , ⋅ > <F,+,·> <F,+,⋅> 就称为域。对于有理数集 Q Q Q,实数集 R R R 和复数集 C C C 而言, < Q , + , ⋅ > , < R , + , ⋅ > , < C , + , ⋅ > <Q,+,·>,<R,+,·>,<C,+,·> <Q,+,⋅>,<R,+,⋅>,<C,+,⋅> 都是域。平时所说的实数域、复数域就是指这些集合以及定义在集合上的运算。关于代数系统以及半群、群、环以及域,有机会会在【离散数学】中介绍。本篇中,完全可以使用实数、复数与加减乘除等概念来理解这里出现的域。
线性空间维度.
- 设 X X X 为线性空间,如果 X X X 有 n n n 个线性无关的元素,但任意 n + 1 n+1 n+1 个元素都线性相关,则称 X X X 为有限维空间,称 n n n 为 X X X 的维数,记 d i m ( X ) = n dim(X) = n dim(X)=n.
- 【性质】设 X X X 为线性空间, d i m ( X ) = n dim(X)=n dim(X)=n, { x 1 , x 2 , . . . , x n } \{x_1,x_2,...,x_n\} {x1,x2,...,xn} 线性无关。则 X X X 中的任意元素 x x x 都可以唯一地表示为 x = ∑ i = 1 n a i x i x=\sum^n_{i=1}a_ix_i x=∑i=1naixi 的线性组合.
【Digression-线性无关】如果 V V V是一个线性空间,如果存在不全为零的系数 a i ∈ P , i = 1 , 2 , . . . , n a_i∈P,i=1,2,...,n ai∈P,i=1,2,...,n,使得 ∑ i = 1 n a i x i = 0 \sum^n_{i=1}a_ix_i=0 ∑i=1naixi=0,那么其中有限多个向量 { x 1 , x 2 , . . . , x n } \{x_1,x_2,...,x_n\} {x1,x2,...,xn} 称为线性相关的。反之,称这组向量为线性无关的。
欧几里得空间.
- 【图源】
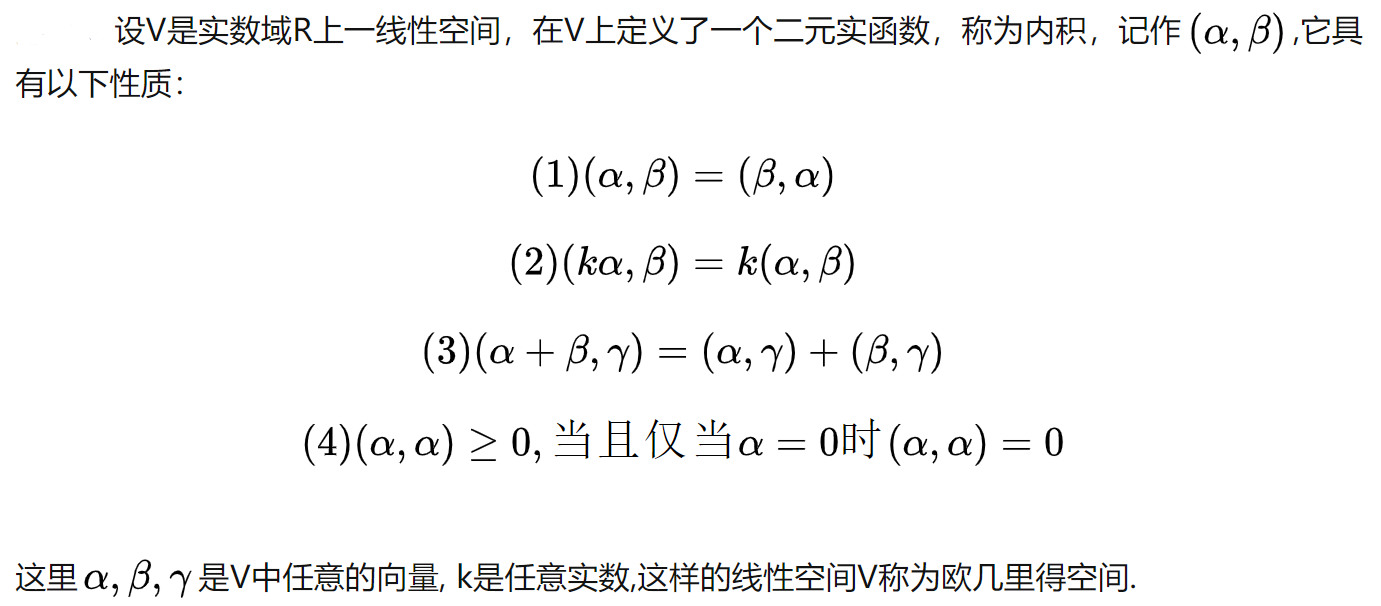
- 实数域上的线性空间+内积=欧几里得空间,可以看出欧氏空间是特殊的线性空间,其中内积满足对称性、正定性与线性性质。
- 欧几里得空间中以 ∣ x ⃗ ∣ = ( x ⃗ , x ⃗ ) = ∑ i = 1 n x i 2 |\vec x|=\sqrt{(\vec x,\vec x)}=\sqrt{\sum^n_{i=1}x_i^2} ∣x∣=(x,x)=∑i=1nxi2 来度量 n n n 维向量 x ⃗ \vec x x 的长度,据此还可以定义两个向量 x ⃗ , y ⃗ \vec x,\vec y x,y 之间的距离 ∣ x ⃗ − y ⃗ ∣ = ( x ⃗ − y ⃗ , x ⃗ − y ⃗ ) = ∑ i = 1 n ( x i − y i ) 2 = d ( x ⃗ , y ⃗ ) |\vec x-\vec y|=\sqrt{(\vec x-\vec y,\vec x-\vec y)}=\sqrt{\sum^n_{i=1}(x_i-y_i)^2}=d(\vec x,\vec y) ∣x−y∣=(x−y,x−y)=∑i=1n(xi−yi)2=d(x,y).
酉空间.
- 前部分的欧氏空间是实数域上的特殊线性空间(引入内积),将基域
P
P
P 推广到复数域
C
C
C 得到酉空间。【图源】
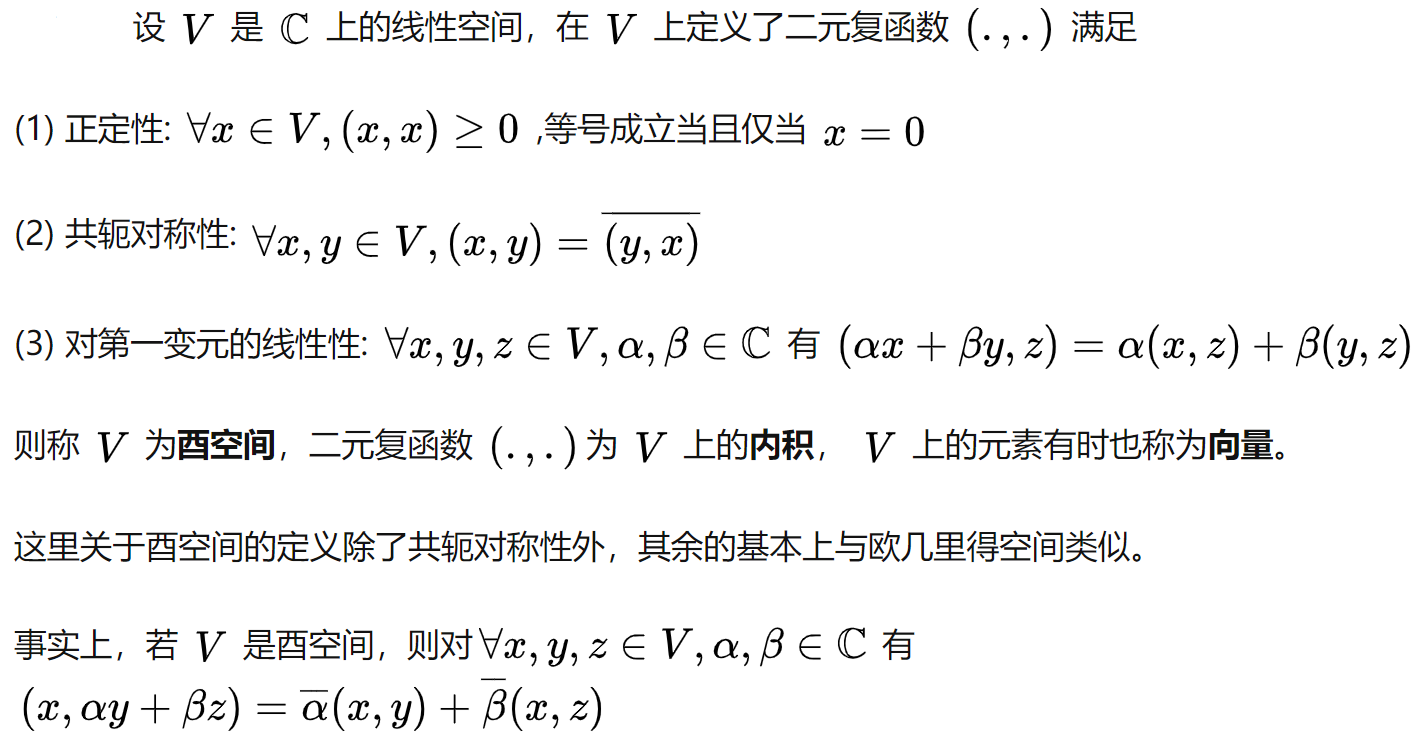
- 酉空间中以 ∣ ∣ x ⃗ ∣ ∣ = ( x ⃗ , x ⃗ ) ||\vec x||=\sqrt{(\vec x,\vec x)} ∣∣x∣∣=(x,x) 来度量向量 x ⃗ \vec x x 的长度,类似地也可以定义距离 d ( x ⃗ , y ⃗ ) = ∣ ∣ x ⃗ − y ⃗ ∣ ∣ d(\vec x,\vec y)=||\vec x-\vec y|| d(x,y)=∣∣x−y∣∣.
- 酉空间和欧几里得空间一个显著不同在于,欧几里得空间中可以定义两向量间夹角 < a ⃗ , b ⃗ > <\vec a,\vec b> <a,b> 的余弦值为 c o s < a ⃗ , b ⃗ > = ( a ⃗ , b ⃗ ) ∣ a ⃗ ∣ ∣ b ⃗ ∣ cos<\vec a,\vec b>=\frac{(\vec a,\vec b)}{|\vec a||\vec b|} cos<a,b>=∣a∣∣b∣(a,b),而酉空间中向量内积不一定为实数,所以无法定义。
在早期的著作中,内积空间被称作酉空间,但这个词已经被淘汰了。
度量空间.
- 顾名思义,度量空间中任意元素之间的距离是可定义的。【图源】
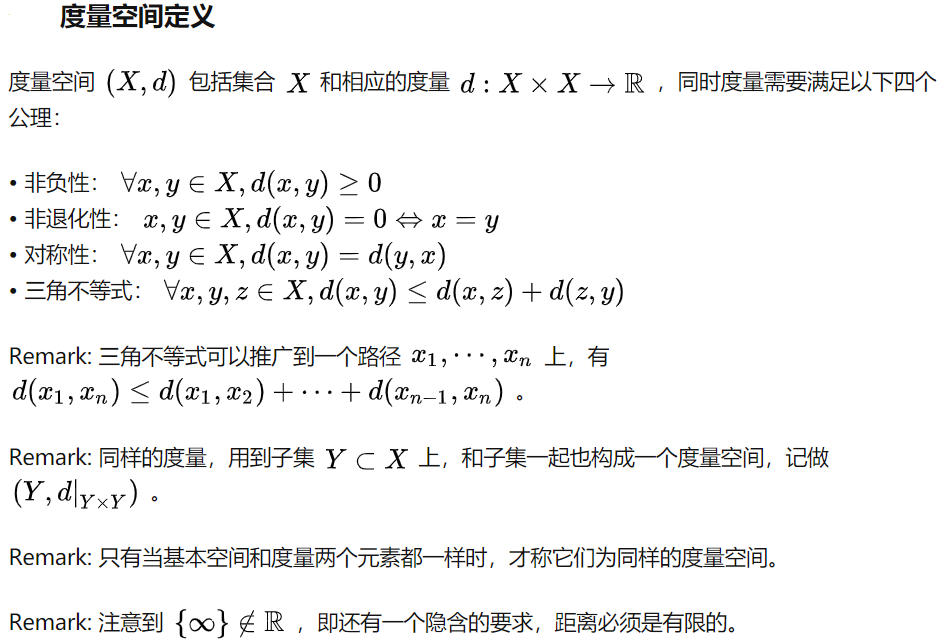
- 例如上面定义的欧几里得空间就是一种度量空间,从不同的角度对待这些集合,关注它的不同性质,往往会反映在不同的名称上。
内积空间.
- 前面我们看到,实数域上的线性空间引入内积概念后得到欧几里得空间,推广到复数域后得到酉空间。可以总结出内积空间是添加了一定结构的线性空间,这个结构就是【内积】,内积的作用是将一对向量和一个标量联系起来,能够形式化的讨论向量的长度和夹角,进一步讨论正交性。
- 内积空间的定义就是前面给出的酉空间定义,但后者已经淘汰。
- 实向量空间 R n R^n Rn 上一个向量内积 ( x ⃗ , y ⃗ ) = ∑ i = 1 n x i y i (\vec x,\vec y)=\sum^n_{i=1}x_iy_i (x,y)=∑i=1nxiyi,复向量空间 C n C^n Cn 上一个向量内积 ( z ⃗ , p ⃗ ) = ∑ i = 1 n z i p i ‾ (\vec z,\vec p)=\sum^n_{i=1}z_i\overline{p_i} (z,p)=∑i=1nzipi.
赋范线性空间.
- 线性空间+范数=赋范线性空间
- 设 E E E 是域 K K K 上的线性空间,定义实值函数 ∣ ∣ ● ∣ ∣ ||●|| ∣∣●∣∣,若它满足:
- 【正定性】 ∀ x ⃗ ∈ E , ∣ ∣ x ⃗ ∣ ∣ ≥ 0 ∀\vec x∈E,||\vec x||≥0 ∀x∈E,∣∣x∣∣≥0 且 ∣ ∣ x ⃗ ∣ ∣ = 0 ⇔ x ⃗ = 0 ⃗ ; ||\vec x||=0⇔\vec x=\vec 0; ∣∣x∣∣=0⇔x=0;
- 【正齐性】 ∀ x ⃗ ∈ E , ∀ α ∈ K , ∣ ∣ α x ⃗ ∣ ∣ = ∣ α ∣ ∣ ∣ x ⃗ ∣ ∣ ; ∀\vec x∈E,∀\alpha∈K,||\alpha\vec x||=|\alpha|||\vec x||; ∀x∈E,∀α∈K,∣∣αx∣∣=∣α∣∣∣x∣∣;
- 【三角不等式】 ∀ x ⃗ , y ⃗ ∈ E , ∣ ∣ x ⃗ + y ⃗ ∣ ∣ ≤ ∣ ∣ x ⃗ ∣ ∣ + ∣ ∣ y ⃗ ∣ ∣ ; ∀\vec x,\vec y∈E,||\vec x+\vec y||≤||\vec x||+||\vec y||; ∀x,y∈E,∣∣x+y∣∣≤∣∣x∣∣+∣∣y∣∣;
- 则称 ∣ ∣ ● ∣ ∣ ||●|| ∣∣●∣∣ 是 E E E 上的一个范数,并称 E E E 为赋范线性空间。
收敛点列.
【Digression-点列】Range of Points,也没啥好解释的吧,很多点的排列集合,类比数列。
- 设点列 { x n } ⊂ E , x ∈ E \{x_n\}⊂E,x∈E {xn}⊂E,x∈E,若 ∣ ∣ x n − x ∣ ∣ → 0 ||x_n-x||→0 ∣∣xn−x∣∣→0,则称点列 { x n } \{x_n\} {xn} 收敛于 x x x,记作 l i m x n = x lim~x_n=x lim xn=x.
- 【柯西序列】设 { x n } ⊂ E \{x_n\}⊂E {xn}⊂E,若 n → ∞ n→∞ n→∞ 时 ∀ p ∈ Z + ∀p∈Z^+ ∀p∈Z+ 都有 ∣ ∣ x n + p − x n ∣ ∣ → 0 ||x_{n+p}-x_n||→0 ∣∣xn+p−xn∣∣→0,那么点列 { x n } \{x_n\} {xn} 称为柯西序列或基本列。
- 另一种定义:设 ( E , d ) (E,d) (E,d) 是度量空间, x n x_n xn 是 E E E 中点列,若对于任意的正数 ϵ \epsilon ϵ,都存在自然数 N N N 使得 x , y ≥ N x,y≥N x,y≥N 时 d ( x x − d y ) < ϵ d(x_x-d_y)<\epsilon d(xx−dy)<ϵ 成立,则称点列 { x n } \{x_n\} {xn} 称为柯西序列。
一叨.
- 对比收敛点列和柯西序列的定义发现,收敛点列一定是柯西序列,但柯西序列不一定在 E E E 上是收敛的,存在着柯西序列极限不属于域 E E E 的情况,此时该柯西序列不收敛,对应着赋范线性空间 E E E 不完备。
- 例如实数域线性空间中一个点列 { 3 , 3.1 , 3.14 , 3.14159 , 3.1415926535897932 , . . . } \{3,3.1,3.14,3.14159,3.1415926535897932,...\} {3,3.1,3.14,3.14159,3.1415926535897932,...} 是柯西序列同时也是一个收敛点列,因为其极限 π ∈ R \pi∈R π∈R,但如果在有理数线性空间中考虑它,由于其极限并不属于有理数,所以该柯西序列在有理数空间中不收敛。
- 完备的赋范线性空间也称为Banach空间,实数域线性空间是完备的,有理数不完备。
Hilbert空间.
- 在接触支持向量机中的核函数时曾经去了解过希尔伯特空间,但当时看得云里雾里。
- 从我们第一部分给出的线性空间开始,引入内积得到内积空间,引入范数得到赋范空间,线性空间就像亚古兽一样,遇到八神太一会进化为战斗暴龙兽,遇到大门大会进化为闪光暴龙兽,而后完备的赋范空间称为Banach空间,这时闪光暴龙兽学习到了充入数码之魂后的爆裂形态。
- 内积空间,也就是战斗暴龙兽那一脉此时战斗力稍有不足,于是自省发现用于表示向量长度的 ∣ ∣ x ⃗ ∣ ∣ = ( x ⃗ , x ⃗ ) ||\vec x||=\sqrt{(\vec x,\vec x)} ∣∣x∣∣=(x,x) 来度量向量 x ⃗ \vec x x 也满足范数的定义,于是内积空间在范数完备的情况下进化为Hilbert空间,战斗暴龙兽进化为了皇家骑士奥米加兽,写到这儿突然燃起来了,此处该有BGM.
- 比较希尔伯特空间和巴拿赫空间的定义发现,希尔伯特空间一定是巴拿赫空间,但巴拿赫空间却不一定是希尔伯特空间,正好对应了奥米加兽比爆裂闪暴小强一点的设定。
【Digression-核函数与希尔伯特空间】假设 K ( x ⃗ , z ⃗ ) K(\vec x,\vec z) K(x,z) 是定义在 X × X X×X X×X上的对称函数,并且对于 x 1 , x 2 , . . . , x m ∈ X x_1,x_2,...,x_m∈X x1,x2,...,xm∈X, K ( x ⃗ , z ⃗ ) K(\vec x,\vec z) K(x,z) 的 G r a m Gram Gram 矩阵是半正定矩阵。可以依据函数 K ( x ⃗ , z ⃗ ) K(\vec x,\vec z) K(x,z) 构成一个希尔伯特空间。由于该函数 K ( x ⃗ , z ⃗ ) K(\vec x,\vec z) K(x,z) 具有再生性,称为再生核,该空间也称为再生核希尔伯特空间。有机会的话,会对《支持向量机》进行补充,讲述关于线性不可分情况下使用核函数支持向量机部分。
完整过程.
- 线性空间+内积=内积空间
- 线性空间+范数=赋范空间
- 线性空间+范数+完备=巴拿赫空间
- 线性空间+内积+完备=希尔伯特空间
内积诱导范数.
- 在内积空间 ( X , ( ● , ● ) ) (X,(●,●)) (X,(●,●)) 中,定义 ∣ ∣ x ⃗ ∣ ∣ = ( x ⃗ , x ⃗ ) ||\vec x||=\sqrt{(\vec x,\vec x)} ∣∣x∣∣=(x,x),也就是前面所说的向量长度,它是一个满足范数定义的实值函数,称为内积诱导出的范数。
- 【证明】正定性与正齐性从内积性质可以推出,三角不等式证明如下。
- ∣ ∣ x ⃗ + y ⃗ ∣ ∣ 2 = ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ ∣ y 2 ∣ ∣ + 2 R e ( x ⃗ , y ⃗ ) ≤ ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ ∣ y 2 ∣ ∣ + 2 ∣ ( x ⃗ , y ⃗ ) ∣ ||\vec x+\vec y||^2=||\vec x||^2+||y^2||+2Re(\vec x,\vec y)≤||\vec x||^2+||y^2||+2|(\vec x,\vec y)| ∣∣x+y∣∣2=∣∣x∣∣2+∣∣y2∣∣+2Re(x,y)≤∣∣x∣∣2+∣∣y2∣∣+2∣(x,y)∣.
【Digression of Cauchy-Schwarz Inequality】
∣ ( x ⃗ , y ⃗ ) ∣ ≤ ∣ ∣ x ⃗ ∣ ∣ ⋅ ∣ ∣ y ⃗ ∣ ∣ |(\vec x,\vec y)|≤||\vec x||·||\vec y|| ∣(x,y)∣≤∣∣x∣∣⋅∣∣y∣∣
- 因此 ∣ ∣ x ⃗ + y ⃗ ∣ ∣ 2 ≤ ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ ∣ y 2 ∣ ∣ + 2 ∣ ( x ⃗ , y ⃗ ) ∣ ≤ ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ ∣ y 2 ∣ ∣ + 2 ∣ ∣ x ⃗ ∣ ∣ ⋅ ∣ ∣ y ⃗ ∣ ∣ = ( ∣ ∣ x ⃗ ∣ ∣ + ∣ ∣ y ⃗ ∣ ∣ ) 2 ||\vec x+\vec y||^2≤||\vec x||^2+||y^2||+2|(\vec x,\vec y)|≤||\vec x||^2+||y^2||+2||\vec x||·||\vec y||=(||\vec x||+||\vec y||)^2 ∣∣x+y∣∣2≤∣∣x∣∣2+∣∣y2∣∣+2∣(x,y)∣≤∣∣x∣∣2+∣∣y2∣∣+2∣∣x∣∣⋅∣∣y∣∣=(∣∣x∣∣+∣∣y∣∣)2.
- 由于范数非负,开平方后得到三角不等式 ∣ ∣ x ⃗ + y ⃗ ∣ ∣ ≤ ∣ ∣ x ⃗ ∣ ∣ + ∣ ∣ y ⃗ ∣ ∣ ||\vec x+\vec y||≤||\vec x||+||\vec y|| ∣∣x+y∣∣≤∣∣x∣∣+∣∣y∣∣.
【Digression-复数模】考虑复数 z = a + b i z=a+bi z=a+bi,那么 ∣ z ∣ = a 2 + b 2 |z|=\sqrt{a^2+b^2} ∣z∣=a2+b2. 另外 ∣ z ∣ 2 = z z ‾ |z|^2=z\overline{z} ∣z∣2=zz.
关于 ∣ ∣ x ⃗ + y ⃗ ∣ ∣ 2 ||\vec x+\vec y||^2 ∣∣x+y∣∣2.
- 上部分证明内积诱导范数满足三角不等式时使用了等式 ∣ ∣ x ⃗ + y ⃗ ∣ ∣ 2 = ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ ∣ y ⃗ ∣ ∣ 2 + 2 R e ( x ⃗ , y ⃗ ) ||\vec x+\vec y||^2=||\vec x||^2+||\vec y||^2+2Re(\vec x,\vec y) ∣∣x+y∣∣2=∣∣x∣∣2+∣∣y∣∣2+2Re(x,y).
- 【证明】设 x ⃗ = a + b i , y ⃗ = c + d i \vec x=a+bi,\vec y=c+di x=a+bi,y=c+di,那么 ∣ ∣ ( a + c ) + ( b + d ) i ∣ ∣ 2 = ( a + c ) 2 + ( b + d ) 2 = a 2 + b 2 + c 2 + d 2 + 2 a c + 2 b d ||(a+c)+(b+d)i||^2=(a+c)^2+(b+d)^2=a^2+b^2+c^2+d^2+2ac+2bd ∣∣(a+c)+(b+d)i∣∣2=(a+c)2+(b+d)2=a2+b2+c2+d2+2ac+2bd,由于 ∣ ∣ x ⃗ ∣ ∣ 2 = a 2 + b 2 ; ∣ ∣ y ⃗ ∣ ∣ 2 = c 2 + d 2 ; ( x ⃗ , y ⃗ ) = ( a c + b d ) + ( b c − a d ) i ||\vec x||^2=a^2+b^2;||\vec y||^2=c^2+d^2;(\vec x,\vec y)=(ac+bd)+(bc-ad)i ∣∣x∣∣2=a2+b2;∣∣y∣∣2=c2+d2;(x,y)=(ac+bd)+(bc−ad)i,所以 2 R e ( x ⃗ , y ⃗ ) = 2 a c + 2 b d 2Re(\vec x,\vec y)=2ac+2bd 2Re(x,y)=2ac+2bd,至此等式得证。
- 由该等式可以很容易证明内积诱导范数的平行四边形公式: ∣ ∣ x ⃗ + y ⃗ ∣ ∣ 2 + ∣ ∣ x ⃗ − y ⃗ ∣ ∣ 2 = 2 ( ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ ∣ y ⃗ ∣ ∣ 2 ) ||\vec x+\vec y||^2+||\vec x-\vec y||^2=2(||\vec x||^2+||\vec y||^2) ∣∣x+y∣∣2+∣∣x−y∣∣2=2(∣∣x∣∣2+∣∣y∣∣2)
柯西不等式.
- 【范数形式】 ∣ ( x ⃗ , y ⃗ ) ∣ ≤ ∣ ∣ x ⃗ ∣ ∣ ⋅ ∣ ∣ y ⃗ ∣ ∣ |(\vec x,\vec y)|≤||\vec x||·||\vec y|| ∣(x,y)∣≤∣∣x∣∣⋅∣∣y∣∣
- 【内积形式】 ∣ ( x ⃗ , y ⃗ ) ∣ 2 ≤ ( x ⃗ , x ⃗ ) ⋅ ( y ⃗ , y ⃗ ) |(\vec x,\vec y)|^2≤(\vec x,\vec x)·(\vec y,\vec y) ∣(x,y)∣2≤(x,x)⋅(y,y)
- 【证明】 0 ≤ ( x ⃗ − a y ⃗ , x ⃗ − a y ⃗ ) = ∣ ∣ x ⃗ ∣ ∣ 2 + ∣ a ∣ 2 ∣ ∣ y ⃗ ∣ ∣ 2 − a ‾ ( x ⃗ , y ⃗ ) − a ( y ⃗ , x ⃗ ) 0≤(\vec x-a\vec y,\vec x-a\vec y)=||\vec x||^2+|a|^2||\vec y||^2-\overline a(\vec x,\vec y)-a(\vec y,\vec x) 0≤(x−ay,x−ay)=∣∣x∣∣2+∣a∣2∣∣y∣∣2−a(x,y)−a(y,x),取 a = ( x ⃗ , y ⃗ ) ∣ ∣ y ⃗ ∣ ∣ 2 a=\frac{(\vec x,\vec y)}{||\vec y||^2} a=∣∣y∣∣2(x,y),得到 ∣ ∣ x ⃗ ∣ ∣ 2 − ∣ ( x ⃗ , y ⃗ ) ∣ 2 ∣ ∣ y ⃗ ∣ ∣ 2 ≥ 0 ||\vec x||^2-\frac{|(\vec x,\vec y)|^2}{||\vec y||^2}≥0 ∣∣x∣∣2−∣∣y∣∣2∣(x,y)∣2≥0,即 ∣ ( x ⃗ , y ⃗ ) ∣ 2 ≤ ∣ ∣ x ⃗ ∣ ∣ 2 ⋅ ∣ ∣ y ⃗ ∣ ∣ 2 = ( x ⃗ , x ⃗ ) ⋅ ( y ⃗ , y ⃗ ) |(\vec x,\vec y)|^2≤||\vec x||^2·||\vec y||^2=(\vec x,\vec x)·(\vec y,\vec y) ∣(x,y)∣2≤∣∣x∣∣2⋅∣∣y∣∣2=(x,x)⋅(y,y),两边开平方即 ∣ ( x ⃗ , y ⃗ ) ∣ ≤ ∣ ∣ x ⃗ ∣ ∣ ⋅ ∣ ∣ y ⃗ ∣ ∣ |(\vec x,\vec y)|≤||\vec x||·||\vec y|| ∣(x,y)∣≤∣∣x∣∣⋅∣∣y∣∣.
参考资料.


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









