






 本文详细介绍了如何使用Matlab 2020与Carsim 2019.1进行联合仿真,包括设置工作路径、数据库操作、动力学模型自定义、Prescan与Simulink集成,以及AnalyticalLaneMakerSensor的参数提取与调整。重点在于传感器输出的多项式处理和数据同步技巧。
本文详细介绍了如何使用Matlab 2020与Carsim 2019.1进行联合仿真,包括设置工作路径、数据库操作、动力学模型自定义、Prescan与Simulink集成,以及AnalyticalLaneMakerSensor的参数提取与调整。重点在于传感器输出的多项式处理和数据同步技巧。
B站上的视频基于的软件版本:
Matlab 2020
Prescan 8.5.0 Analytical Lane Maker Sensor(prescan中这个传感器貌似可以输出多项式系数)
Visual studio 2019
Carsim 2019.1
仿真知识和过程
Carsim数据库路径

Database: 数据库。相当于一个很大的文件夹,里面会存放很多的数据集。
Datasets: 数据集(如果需要测试不同的功能参数,就需要不同的数据集)
Libraries: 功能快捷方式(不会随界面不同而变化)
在不同的界面点击datasets就会出现不同的数据集,应该是对应于当前界面的各种数据集。 Carsim run control界面点击datasets会出现如下界面,选中某个数据集后点击复制即可创建新的run control数据集,保存在C:\Users\CarSim2018.0_Data\Runs中。
在不同的界面可以创建相应的新的数据集,如在vehicle assembly界面创建新的datasets,此时新的数据集保存在C:\Users\CarSim2018.0_Data\Vehicles\Assembly中。
Matlab的工作路径需要设置成carsim的数据库路径,所需的模型也需要复制到数据库路径下。
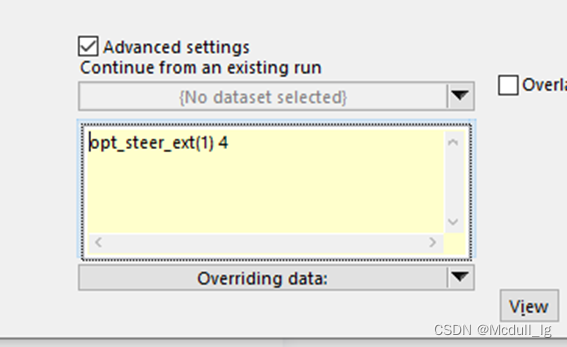
高级设置中需要加入如下的指令,只有加了才能直接将前轮转角作为输入。
设置carsim的初始坐标:
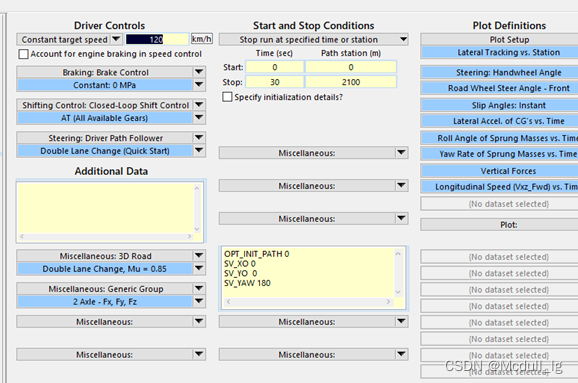
初始速度设置:
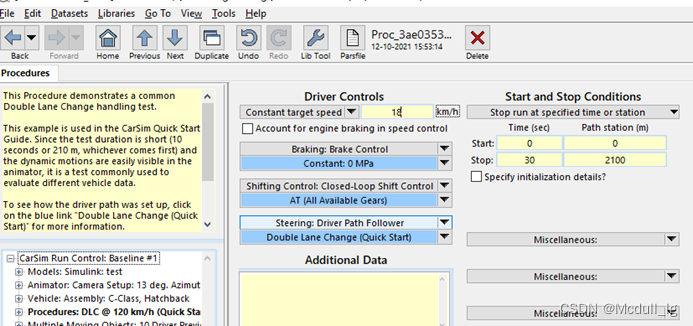
B站标定表油门0-1,刹车-8-0;(且里面的纵向控制不仅考虑了速度控制,还考虑了加速度和位置的控制)
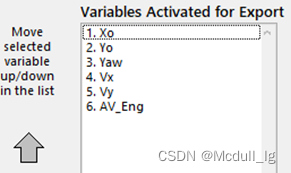
Carsim输出:
Prescan 与carsim联合仿真文件
打开prescan后新建工程testplanner,添加车辆设置坐标,打开carsim

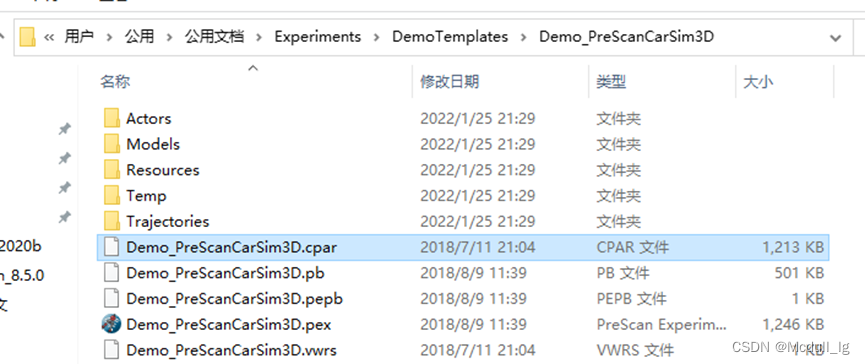
然后选择demo.cpar的仿真文件,相当于提取这个包内的一些动力学文件,在experiments文件夹下(所有prescan工程都会放在这个文件夹下)建立新文件夹DynamicModel保存提取的数据。
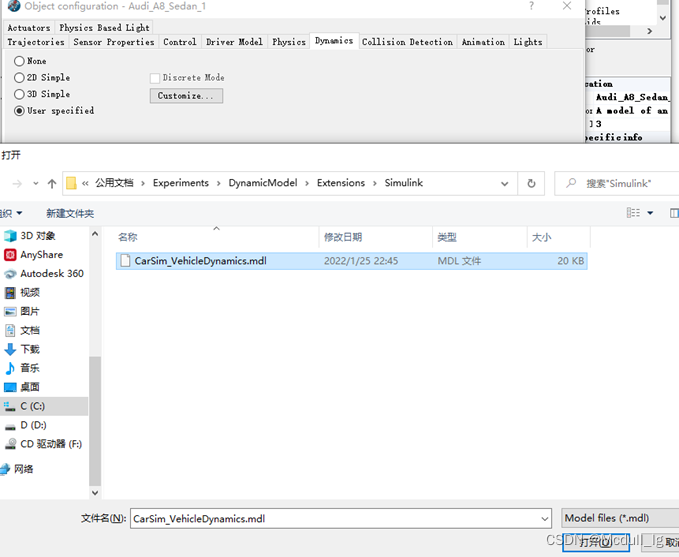
接下来在prescan中右键小车,点击动力学,自定义动力学文件:
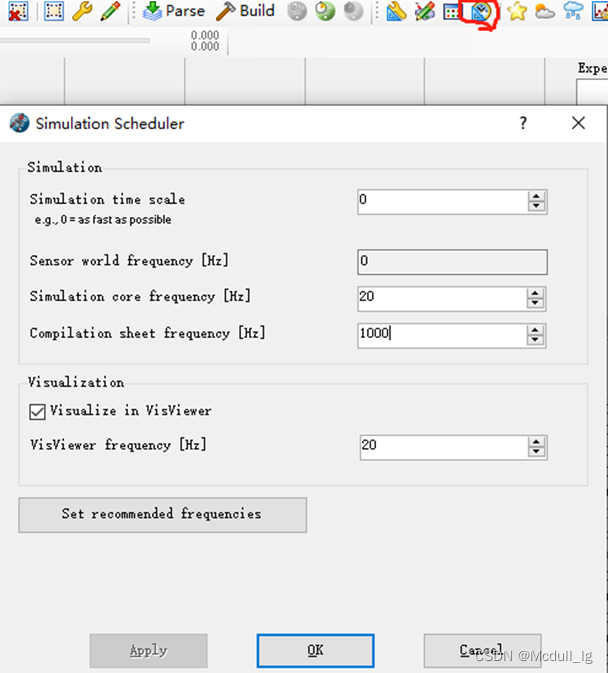
并在prescan中设置仿真频率:

然后必须在prescan中点击 build,生成simulink模型,不点击prescan中的设置不会保存。通过prescan打开matlab ,右键点击prescan图标,点击open

再点击matlab下面的start。然后路径更改到新建的testplanner工程下。打开prescan build出来的模型:

如果打开之后有在prescan中更改则需要点击regenerate。

点击车辆,点击动力学上的箭头,此时:
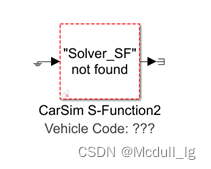
这是因为没有添加simfile 文件,在carsim中send to simulink会得到在DynamicModel文件下的simfile文件。再配置好输入输出即可。
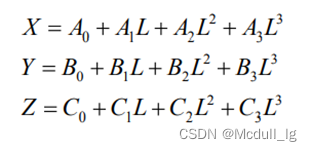
Analytical Lane Maker Sensor(ALMS),(手册433页)输出x,y,z与L(长度)关系的参数多项式,以及GroupID和linelabel。
LineLabel 的值对应于为每条车道线设置的标签值。 输出中具有相同 GroupID 的所有多项式将具有相同的 LaneLabel 值,但具有相同 LineLabel 值的多项式可以具有不同的 GroupID 值

摄像头的视野角度。改为135

从传感器轴系统到检测到的目标的范围。改为40

不勾选,Z的多项式返回0
在prescan中bulid之后在simulik中regenerate。点击:open useful blocks

选择:
能够可视化车道线。提取参数:
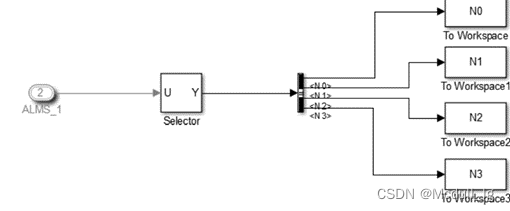
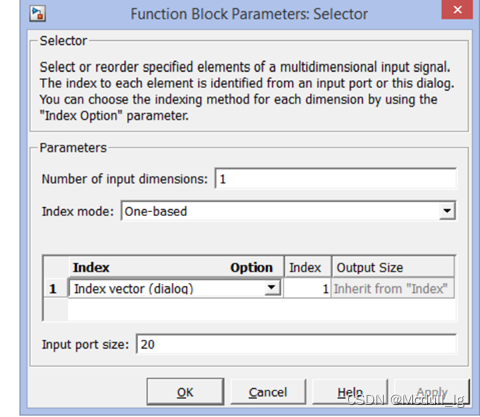
上面使用的 Selector Block 位于 Simulink Library Browser 的 Signal Routing 页面上。 选择器的输入端口大小参数必须设置为在 PreScan 编辑器中为此 ALMS 设置的最大多项式数,见下文
经过测试可知,prescan中频率设置为:
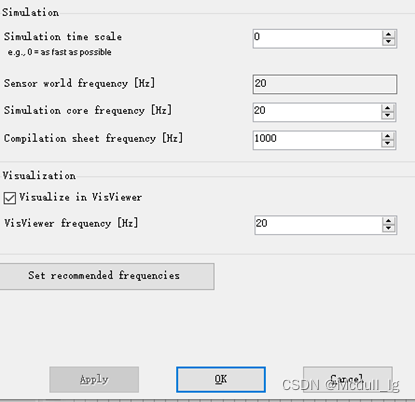
此时,prescan数据输出周期为0.05,而simulink周期需设置为0.001与carsim运行周期相同,最后将carsim输出给prescan时通过速率转换模块转成周期0.05输出。
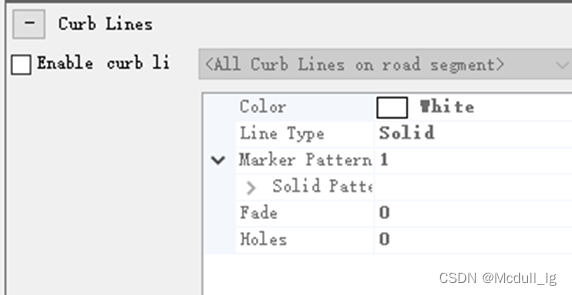
Prescan将道路参数的curb line 取消勾选,这样得到的道路是没有道路边界的,这样使得在弯道也能视觉输出较长的车道线。

















 323
323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









