







 本文详细介绍了图数据结构,包括无向图、有向图、完全图和加权图的概念,以及顶点的度、路径、环等基本元素。讨论了图的两种主要实现方式——邻接矩阵和邻接列表,分析了它们的空间复杂度,并对比了各自的优劣。此外,还提及了连通图、生成树和最小生成树等重要概念。
本文详细介绍了图数据结构,包括无向图、有向图、完全图和加权图的概念,以及顶点的度、路径、环等基本元素。讨论了图的两种主要实现方式——邻接矩阵和邻接列表,分析了它们的空间复杂度,并对比了各自的优劣。此外,还提及了连通图、生成树和最小生成树等重要概念。
概念:
图G=(V,E)由一组顶点V和一组边E组成,每一条边是一个元组(v,w),其中v,w属于V中。如果对元组有序的,则图是有向的(directed)。否则图是无向的(undirected)。
在无向图中(undirected graph),边是没有方向的平面线。在无向图中,可以沿着边任意走一条路。任何无向图都可以表示为有向图,方法是用两条有向边替换每一条无向边。
在有向图中(directed graph),有向图是指每一条边上的顶点都是有序的图。边是从一个节点指向另一个节点的箭头。<Vi,Vj>:Vi称为尾部,Vj称为头部。在有向图中, 只能按照箭头的方向从一个节点转到另一个节点。这意味着, 在有向图中, 有可能达到死胡同, 也有可能到达一个你不能离开的节点。
完全图(complete graph)是每对顶点之间都有一条边的图。无向完全图:n个顶点和n(n-1)/2条边。有向完全图:n个顶点和n(n-1)边。如果(u,v)是E(G)中的边,则u与v相邻,v与v相邻。
加权图(weoghted graph):有时边有第三个组成部分, 重量或成本, 其语义是特定于图形的。具有与其边缘关联的值的图称为加权图。该图可以是定向的, 也可以是无方向的。权重可以表示如下内容:两个顶点之间的物理距离。从一个顶点到另一个顶点所需的时间。从顶点到顶点的行程成本是多少。
子图(Subgraph):子图设G=(V,E)是顶点集V和边集E的图。G的子图是图G'=(V',E'),其中
- V'是V的一个子集。
- E'由E中的边(v,w)组成,使得v和w都在V'中(子图中的边要预先存在,并且定点在子图中)
顶点的度(degree):顶点v的度是连接到顶点v的边数,记为TD(v)。在有向图中,顶点度是进度和出度之和:顶点v的入度是头部为顶点v的边的数目,记为ID(v);顶点v的出度是尾部为顶点v的边数,记为OD(v)
路径的长度是在未加权的图形中沿着路径的边数。它是加权图中路径上弧线的成本之和。
环是在同一顶点处开始和结束的边 (v, v).且其长度大于等于1 。
简单路径是路径上的各顶点均不互相重复。
DAG(定向无环图):无环有向图(图不包含环,若图不包含环,则为无环图)
连通图:连通图是一个无向图,其中有一条从每个顶点到其余另一个顶点的路径。
- 强连通图是一个有向图,其中每个顶点之间都有一条路径(考虑方向)
- 弱连通图是一个有向图,它不是强连通的,但如果图被转换成无向图,它就会连通(简单地忽略方向)。
图的连通分量( Connected Component):无向图G的极大连通子图称为G的连通分量。任何连通图的连通分量只有一个,即是其自身,非连通的无向图有多个连通分量。
- 有向图的一个强连通分量是一个极大的顶点集(不一定包含所有的顶点,可以是多个),其中有一条从集合中任何一个顶点到集合中任何其他顶点的路径。
- 在非连通的无向图中, 从其中的顶点开始只能访问同一连通分量中的顶点 (最大的连通子图)搜索所有连接的组件搜索图形中的每个顶点。如果已访问该顶点, 则它必须位于连通分量中。否则, 从这个顶点开始遍历图形, 我们将得到另一个连通分量。
生成树:如果连通图G的一个子图是一棵包含G的所有顶点的树,则该子图称为G的生成树。 每个具有 n 个顶点的生成树都包含完全为 n-1 的边。如果我们在树上添加任何边缘, 我们就会得到一个循环。
对于无向图G和一棵树T来说,如果T是G的子图,则称T为G的树,如果T是G的生成子图,则称T是G的生成树。
最小生成树:对于一个边上具有权值的图来说,其边权值和最小的生成树称做图G的最小生成树(包含所有节点)。对于一个图G,如果图中的边权值都不相同,则图的最小生成树唯一。
有向树:在根树T中,出度为零的点称为树叶
- 有且仅有一个结点的入度为0;
- 除树根外的结点入度为1;
- 从树根到任一结点有一条有向通路,T中其他顶点称为内点或支点。在根树中,有时需要考虑同一层上结点的次序,规定了每一层上的结点的次序的根树称为有序树。
实现:
数据结构的定义:
由于图中存储了图的顶点和路径信息,所以其数据结构也应该保存相应的信息。
故使用邻接矩阵存储信息,其顶点映射到整数0..N-1,而边则映射成一个N*N的矩阵,定义如下:

对于有向图与无向图而言:

对于加权图而言:

代码实现
第一种方式:矩阵实现
缺点:空间复杂度高,O(N^2),实际生活中们并不适用
import java.util.LinkedList;
import java.util.Queue;
import java.util.Stack;
//浪费空间,有O(N^2)的空间复杂度
public class GraphMatrix<Type> {
private static int MAXV=10;
private Vetex<Type>[] vetex;
private int[][] edges;
private int currentv;
public GraphMatrix() {
this.vetex=new Vetex[MAXV];
this.edges=new int[MAXV][MAXV];
currentv=0;
for(int i=0;i<MAXV;i++) {
for(int j=0;j<MAXV;j++) {
this.edges[i][j]=0;
}
}
}
public boolean isEmpty() {
return currentv==0;
}
public boolean isFull() {
return this.currentv==MAXV-1;
}
public int sizev() {
return currentv+1;
}
public int sizee() {
int sum=0;
for(int i=0;i<=this.currentv;i++) {
for( int j=0;j<=this.currentv;j++) {
sum+=edges[i][j];
}
}
return sum;
}
public void addv(Type data) {
if(find(data)!=-1) {
System.out.println("顶点"+data+"已添加");
}else {
this.vetex[this.currentv]=new Vetex<>(data);
this.currentv++;
}
}
public void adde(Type start,Type end) {
int start1=find(start);
int end1=find(end);
if(start1!=-1 && end1!=-1) {
this.edges[start1][end1]=1;
this.edges[end1][start1]=1;
}else {
System.out.println(start+"或"+end+"不存在");
}
}
public int find(Type data) {
System.out.println("长度为:"+this.currentv);
for(int i=0;i<this.currentv;i++) {
if(data.equals(vetex[i].data)) {
return i;
}
}
return -1;
}
public void print() {
for( int i=0;i<this.currentv;i++) {
for( int j=0;j<this.currentv;j++) {
System.out.print(this.edges[i][j]+" ");
}
System.out.println();
}
}
//广度优先遍历
public void bfs() {
Queue<Integer> q=new LinkedList<>();
q.add(0);
this.vetex[0].isVisited=true;
System.out.print(this.vetex[0].data+" ");
while(!q.isEmpty()) {
int res=q.poll();
int x;
while(( x=findFirst(res))!=-1) {
System.out.print(this.vetex[x].data+" ");
this.vetex[x].isVisited=true;
q.add(x);
}
}
System.out.println();
for(int i=0;i<this.currentv;i++) {
this.vetex[i].isVisited=false;
}
}
//深度优先便利
public void dfs() {
Stack<Integer> s=new Stack<>();
System.out.print(this.vetex[0].data+" ");
s.push(0);
vetex[0].isVisited=true;
while(!s.isEmpty()) {
int res=findFirst(s.peek());
if(res==-1) {
s.pop();
}else {
System.out.print(this.vetex[res].data+" ");
s.push(res);
this.vetex[res].isVisited=true;
}
}
System.out.println();
for(int i=0;i<this.currentv;i++) {
this.vetex[i].isVisited=false;
}
}
public int findFirst(int index) {
for(int i=0;i<this.currentv;i++) {
if(this.edges[index][i]==1 && (!this.vetex[i].isVisited)) {
return i;
}
}
return -1;
}
}
class Vetex<Type>{
public Type data;
public boolean isVisited;
public Vetex() {
this.data=null;
this.isVisited=false;
}
public Vetex(Type data) {
this.data=data;
this.isVisited=false;
}
}
class TestGraphMatrix{
public static void main(String args[]) {
GraphMatrix<Character> graph = new GraphMatrix<>();
graph.addv('A');
graph.addv('B');
graph.addv('C');
graph.addv('D');
graph.addv('E');
graph.adde('B', 'C');
graph.adde('A', 'B');
graph.adde('C', 'D');
graph.adde('B', 'E');
graph.adde('C', 'E');
graph.print();
graph.dfs();
graph.bfs();
}
}
第二种实现(基于链表的实现)
概念:
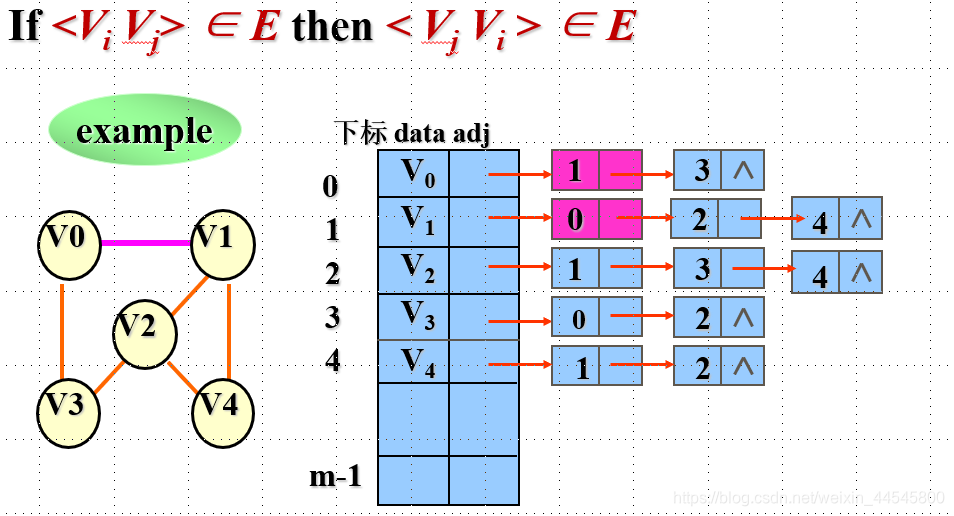
无向图邻接矩阵:
- 无向图的邻接矩阵是对称的。在邻接列表表示形式中, 如果 (i, j) 是边, 则顶点 j 在顶点 i 列表中, 顶点 i 在顶点 j 列表中。
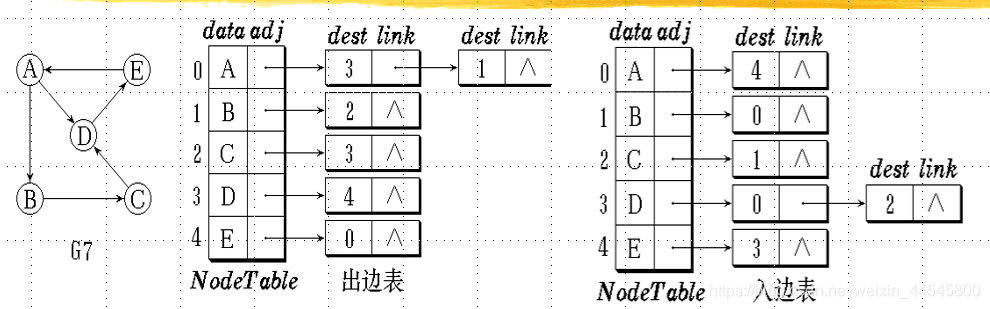
有向图邻接矩阵:
- 在邻接列表中,第i个边列表表示从顶点i开始的所有边。
- 在逆邻接列表中,第i个列表中的所有边都以顶点i结束。
代码实现:
两种实现方式比较:
如果图形是稀疏的, 并且边缘不多, 则邻接列表可能比邻接矩阵更具有空间效率。
如果图形是密集的, 并且边缘的数量是 O(N2), 那么邻接矩阵可能会更有效的空间。
空间复杂度:
矩阵形式:O(V^2)
import java.util.LinkedList;
import java.util.Queue;
import ds.sequence.SeqList;
public class GraphLink<Type> {
private static int SIZE=10;
private SeqList<VetexNode<Type>> graph;
private int currente;
public GraphLink() {
this.graph=new SeqList<>(SIZE);
this.currente=0;
}
public boolean isEmpty() {
return this.graph.size()==0;
}
public void makeEmpty() {
this.graph.makeEmpty();
}
public int sizev() {
return this.graph.size();
}
public int sizee() {
return this.currente;
}
public void addv(Type data) {
graph.add(this.graph.size(), new VetexNode<>(data));
}
public void adde(Type datav,Type datae) {
int resv=find(datav);
int rese=find(datae);
if(resv==-1) {
addv(datav);
}
if(rese==-1) {
addv(datae);
}
if(resv!=-1 && rese!=-1) {
EdgeNode v=graph.get(find(datav)).nodev;
if(v==null) {
graph.get(find(datav)).nodev=new EdgeNode(rese);
}else {
while(v.nodee!=null) {
v=v.nodee;
}
v.nodee=new EdgeNode(rese);
}
EdgeNode v2=graph.get(find(datae)).nodev;
if(v2==null) {
graph.get(find(datae)).nodev=new EdgeNode(resv);
}else {
while(v2.nodee!=null) {
v2=v2.nodee;
}
v2.nodee=new EdgeNode(resv);
}
this.currente++;
}
}
public void bfs() { //广度遍历
boolean [] visited = new boolean[graph.size()]; //需要另开辟一个数组,若每一个顶点都保存一个isvisited的话,由于每个节点地址不同,依旧会重复输出。
for(int i=0;i<visited.length;i++) {
visited[i]=false;
}
Queue<Integer> q=new LinkedList<>();
q.add(0);
System.out.print(graph.get(0).data+" ");
visited[0]=true;
while(!q.isEmpty()) {
int res=q.poll();
EdgeNode v=this.graph.get(res).nodev;
while(v!=null) {
if(!visited[v.dest]) {
q.add(v.dest);
visited[v.dest]=true;
System.out.print(graph.get(v.dest).data+" ");
}
v=v.nodee;
}
}
System.out.println();
}
//输出连通分量
public void components() {
//类似于深度遍历,只不过得把所有的额顶点全部遍历完成
System.out.println("略");
}
public int find(Type data) {
for( int i=0;i<this.graph.size();i++) {
if(data.equals(this.graph.get(i).data)) {
return i;
}
}
return -1;
}
}
class EdgeNode{
public int dest;
public int weight;
public EdgeNode nodee;
public EdgeNode() {
this.nodee=null;
}
public EdgeNode(int dest) {
this.dest=dest;
}
public EdgeNode(int dest,int weight) {
this.dest=dest;
this.weight=weight;
this.nodee=null;
}
public EdgeNode(int dest, int weight, EdgeNode node) {
this.dest = dest;
this.weight = weight;
this.nodee = node;
}
}
class VetexNode<Type>{
public Type data;
public EdgeNode nodev;
public VetexNode() {
this.data=null;
this.nodev=null;
}
public VetexNode(Type data) {
this.data=data;
this.nodev=null;
}
public VetexNode(Type data, EdgeNode nodev) {
this.data = data;
this.nodev = nodev;
}
}
class TestGraphLink{
public static void main(String args[]) {
GraphLink<Character> graph=new GraphLink<>();
graph.addv('A');
graph.addv('B');
graph.addv('C');
graph.addv('D');
graph.addv('E');
graph.adde('B', 'C');
graph.adde('A', 'B');
graph.adde('C', 'D');
graph.adde('B', 'E');
graph.adde('C', 'E');
graph.adde('A', 'C');
System.out.println("共有"+graph.sizee()+"条路径");
graph.bfs();
}
}邻接表形式:O(V+N)
时间复杂度:

临界多表
无向图的邻接多表
在无向图的邻接多重表中,每一条边被一个边节点表示。所以遍历图就变得很遍历,而顶点列表是顺序列表。每个节点有两个成员。数据存储有关顶点的信息,从该顶点到第一条边的第一个输出点
结构如下:
eg:
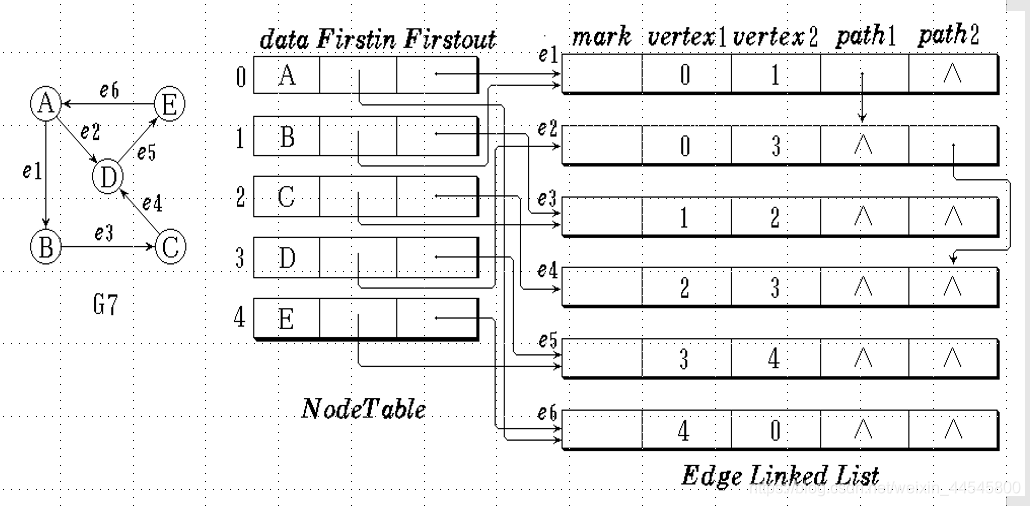
有向图的临界多表:
path1:指向与此顶点具有相同源的下一个顶点。
path2:指向与此顶点具有相同目标的下一个顶点。
由节点表示的每个顶点。它是边内列表和边外列表的头
member:存储有关此顶点的信息。
Firstin:指向此顶点的第一个边端点
Firstout:指出此顶点的第一个边端点
eg:


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









