







目录
启发式搜索算法
启发式搜索(有信息搜索),是相对于广度优先搜索和深度优先搜索这类无信息搜索的搜索算法。该类算法是基于能够获得辅助算法的额外信息进行运算,这些信息称为启发信息。其中启发式搜索中最具代表性的就是贪婪最佳优先算法和A*算法。1
启发式搜索算法满足三个条件:
- 具有启发函数:估计结点n距离达到目标还需要多少代价。在求最短路径的问题中,该函数为以相同的速度到达两个城市间的时间代价。
- 具有评价函数:根据搜索算法的不同,评价函数不同。评价函数是用以选择最优的边缘结点。
- 辅助信息:即启发信息,是用以额外地帮助搜索的信息。例如,各结点到目标结点的最短距离。
树搜索
贪婪最佳优先搜索
贪婪最佳优先算法,可以看作是广度优先算法的改进版,其评价函数=启发函数。
案例场景
贪婪最佳优先搜索算法经常用于解决路径的规划问题,依据不同的评判标准来寻找符合要求的道路,实际应用例如导航的路线规划,游戏中NPC移动路径等等。
其中最典型的就是单源最短路径问题。
采用的解决方案
首先把起点到所有点的距离存下来找个最短的,然后松弛一次再找出最短的,所谓的松弛操作就是,遍历一遍看通过刚刚找到的距离最短的点作为中转站会不会更近,如果更近了就更新距离,这样把所有的点找遍之后就存下了起点到其他所有点的最短距离。
改进点
不足:
- 贪婪最佳优先搜索不是最优的;
- 启发函数代价最小化这一目标会对错误的起点比较敏感;
- 贪婪最佳优先搜索也是不完备的;
- 在最坏的情况下,贪婪最佳优先搜索的时间复杂度和空间复杂度都是O(b^m)(b是节点的分支因子数目、m是搜索空间的最大深度)。
改进:
从启发函数上入手,设计一个更优的启发函数。由此我们引入A*算法
辅助信息:任意一个城市与目的城市之间的直线距离。
其他应用场景:区间调度问题、找零问题等等。
A*搜索算法
案例场景
最经典的“罗马尼亚度假问题”,即找到从初始地点Arad到目的地点Bucharest的一条路径。
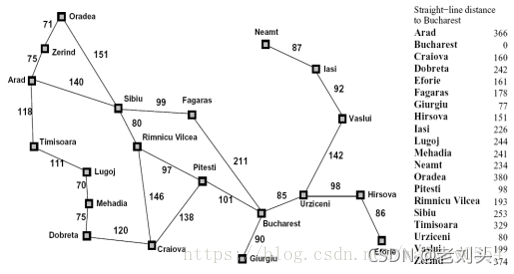
采用的解决方案
定义评价函数:f(n)=g(n)+h(n)
- g(n)表示从起始节点到节点n的开销代价值,h(n)表示从节点n到目标节点路径中所估算的最小开小代价值。
- f(n)可视为经过节点n、具有最小开销代价值的路径。
- 为了保证A*算法是最优,需要启发函数h(n)是可容的和一致的(或者也称是单调的)。
改进点
不足:
在每次扩展结点时,总是把所有的待测节点存入内存中,空间复杂度很高,因此考虑优化,引出递归最佳优先搜索。
改进:
递归最佳优先搜索(RBFS)
- 记录当前节点的祖先可得到的最佳可替换路径的f值。
- 如果当前的f值超过了这个限制,则递归将转回到替换路径。
- 向上回溯改变f值到它的孩子的最佳f 值
- 重复扩展这个上个节点,因为仍有可能存在较优解。
辅助信息:历史耗程
其他应用场景:游戏、机器人自动寻路
Minimax搜索
案例场景
Minimax算法又名极小化极大算法,是一种找出失败的最大可能性中的最小值的算法。Minimax算法常用于棋类等由两方较量的游戏和程序,这类程序由两个游戏者轮流,每次执行一个步骤。我们众所周知的五子棋、象棋等都属于这类程序,所以说Minimax算法是基于搜索的博弈算法的基础。该算法是一种零总和算法,即一方要在可选的选项中选择将其优势最大化的选择,而另一方则选择令对手优势最小化的方法。一个经典的案例场景就是“井字棋”问题。
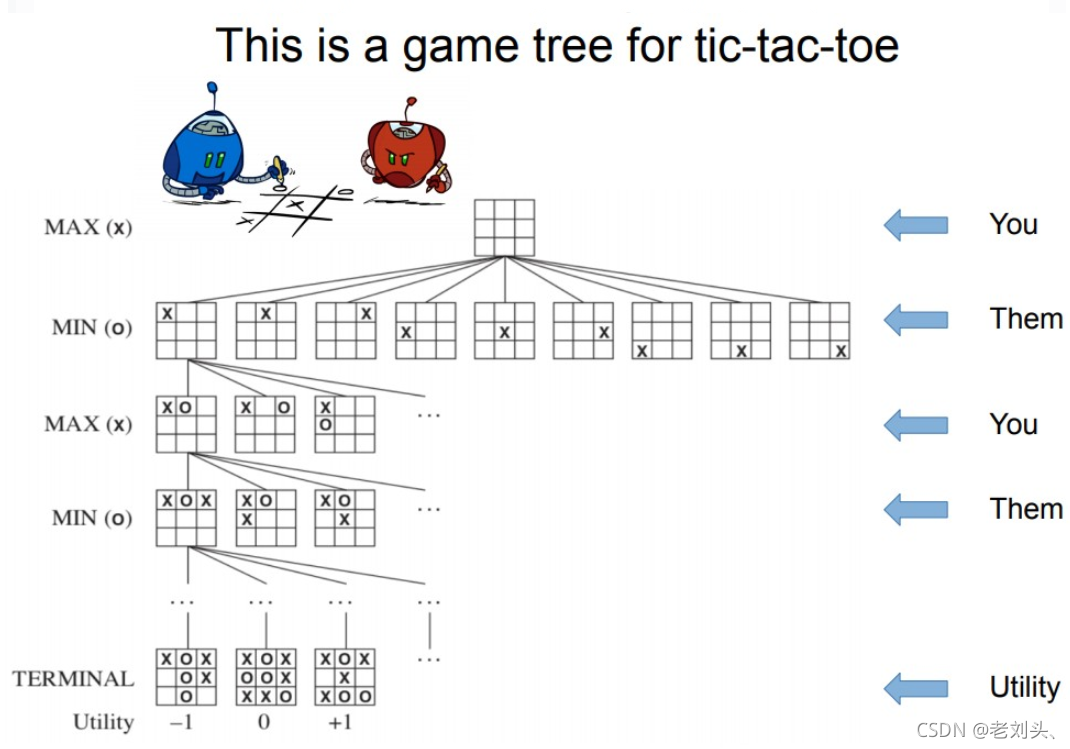
采用的解决方案
“井字棋”问题中,在初始状态,MIN有9个可能的走法。游戏交替执行,MAX下X,MIN下O,直到到达了树的叶节点对应的终止状态,也就是说一方的三个棋子连成一条直线或者所有棋位都填满了。叶节点上的数字指示了这个终止状态对于MAX来说的效用值;值越高被认为对MAX越有利,而对MIN则越不利。所以MAX的任务是利用搜索树(特别是终止状态的效用值)来确定最佳的招数,即求解终止状态为+1的招数。
改进点
不足:
- Minimax算法往往会生成巨大的分支,尤其是当遇到复杂问题的时候,如果还是依次遍历每一个分支,就会占用巨大的内存。
- 基础的Minimax算法考虑的对手都会选择最利他(对方尽可能得分)的动作,但是在现实情况中,并非如此。
改进:
- 采用Alpha-Beta剪枝法对Minimax产生的巨大分支进行修剪。
- 针对对手的选择选取平均/随机策略。
辅助信息:每一步行动导致局势变化后给出的得分
其他应用场景:分硬币、各种棋类对弈等问题
优化算法
爬山法
案例场景
经典的“八皇后”问题:
在8×8格的国际象棋上摆放8个皇后,使其不能互相攻击,即任意两个皇后都不能处于同一行、同一列或同一斜线上,问有多少种摆法。高斯认为有76种方案。1854年在柏林的象棋杂志上不同的作者发表了40种不同的解,后来有人用图论的方法解出92种结果。如果经过±90度、±180度旋转,和对角线对称变换的摆法看成一类,共有42类。
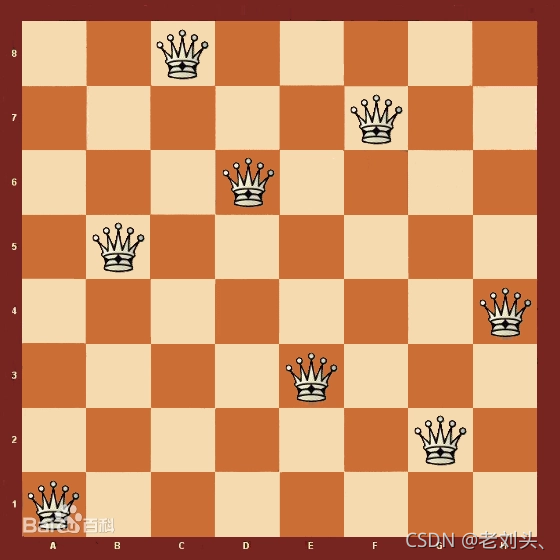
采用的解决方案
随机设置一个初始状态,建立一个冲突函数,以相互冲突的皇后个数来评价状态的优劣。
三条线:列线、主副对角线,皇后的冲突个数比较好计算。假设某条线上有n个皇后,则冲突个数为n*(n-1)*0.5。
每更新一次状态,即每挪动一个皇后,都有56个邻居状态。计算这些新邻居状态的冲突值,选择冲突值最小的邻居状态作为下一个状态。如果本次的初始状态可以由爬山法寻找到最优解,那么爬山法的收敛速度是很快的,因此寻找新邻居的次数如果大于100次,可以认为在这个初始状态下,爬山法寻找不到解。
改进点
不足:
爬山算法即是模拟爬山的过程,随机选择一个位置爬山,每次朝着更高的方向移动,直到到达山顶,即每次都在临近的空间中选择最优解作为当前解,直到局部最优解。这样算法会陷入局部最优解,能否得到全局最优解取决于初始点的位置。初始点若选择在全局最优解附近,则就可能得到全局最优解。
- 局部最大:某个节点比周围任何一个邻居都高,但是它却不是整个问题的最高点。
- 高地:也称为平顶,搜索一旦到达高地,就无法确定搜索最佳方向,会产生随机走动,使得搜索效率降低。
- 山脊:搜索可能会在山脊的两面来回震荡,前进步伐很小。
爬山法经常被卡在某个局部最大值(或最小代价处),其成功率低到只有14%
改进:
- 使用随机爬山法:随机选择一个优于当前状态的状态
- 首选爬山法:首先选择第一个优于当前状态的状态、对于上千后继比较管用
- 随机重启爬山法:先随机生成一个初始状态,若不行再随机生成一个初始状态,直到找到目标
辅助信息:邻居状态
其他应用场景:求解最短路径(效果一般)、选址问题、求解火电机组的经济发电调度、串行计算中大规模矩阵带宽缩减
模拟退火算法
案例场景
模拟退火算法来源于固体退火原理,故最经典的应该就是解决“固体物质的退火”问题:
将固体加温至充分高,再让其徐徐冷却,加温时,固体内部粒子随温升变为无序状,内能增大,而徐徐冷却时粒子渐趋有序,在每个温度都达到平衡态,最后在常温时达到基态,内能减为最小。
采用的解决方案
模拟退火算法从某一较高初温出发,伴随温度参数的不断下降,结合概率突跳特性在解空间中随机寻找目标函数的全局最优解,即在局部最优解能概率性地跳出并最终趋于全局最优。
模拟退火算法可细分为四个步骤:
- 是由一个产生函数从当前解产生一个位于解空间的新解;为便于后续的计算和接受,减少算法耗时,通常选择由当前新解经过简单地变换即可产生新解的方法,如对构成新解的全部或部分元素进行置换、互换等,注意到产生新解的变换方法决定了当前新解的邻域结构,因而对冷却进度表的选取有一定的影响。
- 是计算与新解所对应的目标函数差。因为目标函数差仅由变换部分产生,所以目标函数差的计算最好按增量计算。事实表明,对大多数应用而言,这是计算目标函数差的最快方法。
- 是判断新解是否被接受,判断的依据是一个接受准则,最常用的接受准则是Metropolis准则: 若ΔT<0则接受S′作为新的当前解S,否则以概率exp(-ΔT/T)接受S′作为新的当前解S。
- 是当新解被确定接受时,用新解代替当前解,这只需将当前解中对应于产生新解时的变换部分予以实现,同时修正目标函数值即可。此时,当前解实现了一次迭代。可在此基础上开始下一轮试验。而当新解被判定为舍弃时,则在原当前解的基础上继续下一轮试验。
模拟退火算法与初始值无关,算法求得的解与初始解状态S(是算法迭代的起点)无关;模拟退火算法具有渐近收敛性,已在理论上被证明是一种以概率收敛于全局最优解的全局优化算法;模拟退火算法具有并行性。
改进点
不足:
存在三个参数问题:
- 温度T的初始值设置问题:温度的初始值T设置是影响模拟退火算法全局搜索性能的重要因素之一、初始温度高,则搜索到全局最优解的可能性大,但因此要花费大量的计算时间;反之,则可节约计算时间,但全局搜索性能可能受到影响。
- 退火速度问题(每个T值的迭代次数):模拟退火算法的全局搜索性能也与退火速度密切相关。一般来说,同一温度下的“充分”搜索是相当必要的,但这也需要计算时间。循环次数增加必定带来计算开销的增大。
- 温度管理问题:温度管理问题也是模拟退火算法难以处理的问题之一。
改进:
结合其他算法进行组合优化。
使用以下降温方式(为了保证较大的搜索空间,α一般取接近于1的值,如0.95、0.9):
辅助信息:时间信息
其他应用场景:VLSI设计、图像识别和神经网计算机的研究、公路隧道内轮廓优化、作业车间调度问题等
遗传算法
案例场景
“猜句子”问题:给定目标句子,由随机字符组成的句子演化成目标句。
例:
基础字符集:abcdefghijklmnopqrstuvwxyzABCDEFGHIJKLMNOPQRSTUVWXYZ
目标句:Genetic algorithm is a search algorithm used in computational mathematics to solve optimization.
采用的解决方案
- 生成初始个体:接下来需要生成初始个体,即由字符集合随机生成一个与目标字符串长度相等的字符串。
- 适应度:遗传算法提供的适应度值是引擎获得的唯一反馈,可以引导其走向一个解决方案。在这个问题中,适应度值为当前字符串与目标字符串匹配的字符个数。
- 变异:将字符串的任意两个位置字符调换,即可完成变异操作。
改进点
不足:
- 收敛速度慢
- 局部搜索能力差
- 控制变量多
- 无缺点的终止准则
改进:
- 双倍体遗传算法:完成选择、交叉、变异操作后增加一个显隐性重排操作,增加算法随机性,并提高隐性染色体里优良基因的存活。
- 双种群遗传算法:在执行完基础操作后增加一步杂交操作,交换种群之间优秀个体携带的遗传信息,以此来达到更高的平衡态,跳出局部最优。
- 自适应遗传算法:让交叉概率与变异概率能随适应度变化自动改变,有利于跳出局部最优,也有利于个体生存;这能够保持群体多样性和遗传算法的收敛性。
辅助信息:群体大小、遗传算法的终止进化代数、交叉概率、变异概率
其他应用场景:组合优化、机器学习、信号处理、自适应控制和人工生命
蚁群算法
案例场景
“旅行商”问题:给定一系列城市和每对城市之间的距离,求解访问每一座城市一次并回到起始城市的最短回路。
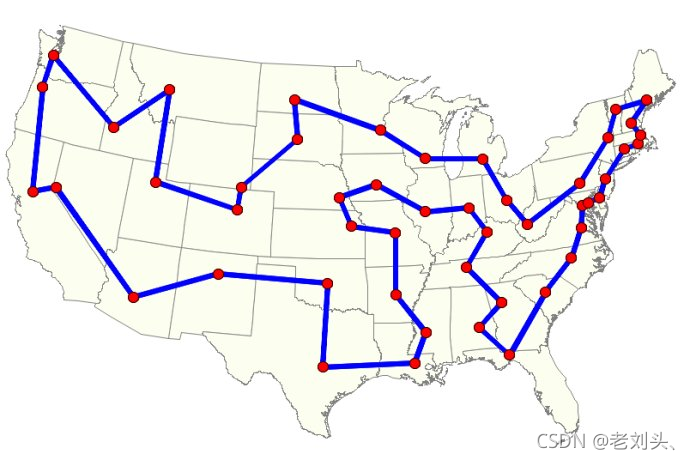
采用的解决方案
假如蚁群中所有蚂蚁的数量为m,所有城市之间的信息素用矩阵pheromone表示,最短路径为bestLength,最佳路径为bestTour。
每只蚂蚁都有自己的内存,内存中用一个禁忌表来存储该蚂蚁已经访问过的城市,表示其在以后的搜索中将不能访问这些城市;还有用另外一个允许访问的城市表来存储它还可以访问的城市;另外还用一个矩阵来存储它在一个循环(或者迭代)中给所经过的路径释放的信息素;还有另外一些数据,例如一些控制参数(α,β,ρ,Q),该蚂蚁行走玩全程的总成本或距离。
求解步骤:
- 初始化
- 为每只蚂蚁选择下一个节点。
- 更新信息素矩阵
- 检查终止条件
- 输出最优值
改进点
不足:
- 收敛速度慢。蚁群算法中信息素初值相同,选择下一个节点时倾向于随机选择。虽然随机选择能探索更大的任务空间,有助于找到潜在的全局最优解,但是需要较长时间才能发挥正反馈的作用,导致算法初期收敛速度较慢。
- 局部最优问题。蚁群算法具有正反馈的特点,初始时刻环境中的信息素完全相同,蚂蚁几乎按随机方式完成解的构建,这些解必然会存在优劣之分。在信息素更新时,算法陷入局部最优,且难以跳出局部最优。
- 优化能力问题。蚁群算法中参数众多并且具有一定的关联性,虽然蚁群算法在很多领域都有广泛应用,但是参数选择更多是依赖经验和试错,不恰当的初始参数会减弱算法的寻优能力。当进行路径规划时,为避免形成环形路径或者重复访问某些节点在算法中设置禁忌表,但是禁忌表很容易造成“死锁”现象,减少种群中的有效蚂蚁数量,降低算法的优化效率。
- 种群多样性与收敛速度的矛盾。种群多样性对应于候选解在问题空间的分布。个体分布越均匀,种群多样性就越好,得到全局最优解的概率就越大,但是寻优时间就越长;个体分布越集中,种群多样性就越差,不利于发挥算法的探索能力。正反馈加快了蚁群算法的收敛速度,却使算法较早地集中于部分候选解,因此正反馈降低了种群的多样性,也不利于提高算法的全局寻优能力。
改进:
- 精英策略的蚂蚁系统:AS算法中,蚂蚁在其爬过的边上释放与其构建路径长度成反比的信息素量,蚂蚁构建的路径越好,则属于路径的各个边上的所获得的信息素量就越多,这些边以后在迭代中被蚂蚁选择的概率也就越大。
- 基于排列的蚂蚁系统:在精英策略的基础上,更新更好进程上的信息素,选择的标准是其行程长度决定的排序;每只蚂蚁放置信息素的强度通过排序加权处理确定。
- 最大最小蚂蚁系统:该算法修改了AS的信息素更新方式,只允许迭代最优蚂蚁(在本次迭代构建出最短路径的蚂蚁),或者至今最优蚂蚁释放信息素;路径上的信息素浓度被限制在[MAX,MIN ]范围内;另外,信息素的初始值被设为其取值上限,这样有助于增加算法初始阶段的搜索能力。为了避免搜索停滞,问题空间内所有边上的信息素都会被重新初始化。
辅助信息:信息素重要程度、启发式因子重要程度、信息素蒸发系数、ant蚂蚁数量、iter迭代次数
其他应用场景:CVRP问题、调度问题、准直图像处理等
粒子群搜索
案例场景
粒子群搜索算法比较简单的应用场景是函数优化问题。
例:已知函数y=f(x1,x2)=x1^2 + x2^2,其中-10<=x1,x2<=10,求解y的最小值。
采用的解决方案
- 初始化:设置种群大小,在搜索空间中随机初始化每个解的速度与位置,计算适应函数值,并得到粒子的历史最优位置和群体的全局最优位置。
- 更新粒子的速度和位置:根据自身的历史最优位置和全局的最优位置,更新每个粒子的速度和位置。
- 评估粒子的适应度函数值:更新例子的历史最优位置和全局的最优位置。
- 如果满足结束条件,则结束;若不满足,执行步骤二并继续按序执行。
改进点
不足:
PSO算法存在早熟收敛、维数灾难、易于陷入局部极值等问题。
改进:
- 调整PSO的参数来平衡算法的全局探测和局部开采能力.如Shi和Eberhart对PSO算法的速度项引入了惯性权重,并依据迭代进程及粒子飞行情况对惯性权重进行线性(或非线性)的动态调整,以平衡搜索的全局性和收敛速度.2009年张玮等在对标准粒子群 算法位置期望及方差进行稳定性分析的基础上,研究了加速因子对位置期望及方差的影响,得出了一组较好的加速因子取值。
- 设计不同类型的拓扑结构,改变粒子学习模式,从而提高种群的多样性,Kennedy等人研究了不同的拓扑结构对SPSO性能的影响.针对SPSO存在易早熟收敛,寻优精度不高的缺点,于2003年提出了一种更为明晰的粒子群算法的形式:骨干粒子群算法(Bare Bones PSO,BBPSO)。
- 将PSO和其他优化算法(或策略)相结合,形成混合PSO算法.如曾毅等将模式搜索算法嵌入到PSO算法中,实现了模式搜索算法的局部搜索能力与PSO算法的全局寻优能力的优势互补.
- 采用小生境技术。小生境是模拟生态平衡的一种仿生技术,适用于多峰函数和多目标函数的优化问题.例如,在PSO算法中,通过构造小生境拓扑,将种群分成若干个子种群,动态地形成相对独立的搜索空间,实现对多个极值区域的同步搜索,从而可以避免算法在求解多峰函数优化问题时出现早熟收敛现象. Parsopoulos提出一种基于“分而治之”思想的多种群PSO算法,其核心思想是将高维的目标函数分解成多个低维函数,然后每个低维的子函数由一个子粒子群进行优化,该算法对高维问题的求解提供了一个较好的思路。
不同的发展方向代表不同的应用领域,针对不同领域的不同问题求解时选择最合适的方法。
辅助信息:粒子位置和速度
其他应用场景:函数优化、神经网络训练、模糊系统控制
参考文章:https://blog.csdn.net/qq_44250808/article/details/115630739 ↩︎

















 3330
3330

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









