







前言
- 本次是ymodem源码文件是依据rt-thread提供的组件进行重新改造,改造结果就是不依赖于os框架,通过函数回调的方式进行整合的方式。
- 本次使用的芯片为stm32f407zgt6
- threax+letter-shell 组件的结合,参考上一篇博客
代码
ymodem 文件传输协议
头文件
/*
* COPYRIGHT (C) 2011-2022, Real-Thread Information Technology Ltd
* All rights reserved
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2013-04-14 Grissiom initial implementation
* 2019-12-09 Steven Liu add YMODEM send protocol
* 2022-08-04 Meco Man move error codes to rym_code to silence warnings
*/
#ifndef __YMODEM_H__
#define __YMODEM_H__
#include <stdint.h>
#include <stdio.h>
#include <stddef.h>
#include <string.h>
/*是否使用动态分配函数控制,如果不使用,则在代码中会直接定义一个数组*/
//#define RYM_CTX_USE_ALLOC_CALLBACK
#define YMODEM_OK 0
#define YMODEM_ERROR 1
#define YMODEM_NO_MEM 2
#define YEMODEM_ASSERT(ex)
/* The word "RYM" is stand for "Real-YModem". */
enum rym_code {
RYM_CODE_NONE = 0x00,
RYM_CODE_SOH = 0x01,
RYM_CODE_STX = 0x02,
RYM_CODE_EOT = 0x04,
RYM_CODE_ACK = 0x06,
RYM_CODE_NAK = 0x15,
RYM_CODE_CAN = 0x18,
RYM_CODE_C = 0x43,
/* RYM error code */
RYM_ERR_TMO = 0x70, /* timeout on handshake */
RYM_ERR_CODE = 0x71, /* wrong code, wrong SOH, STX etc */
RYM_ERR_SEQ = 0x72, /* wrong sequence number */
RYM_ERR_CRC = 0x73, /* wrong CRC checksum */
RYM_ERR_DSZ = 0x74, /* not enough data received */
RYM_ERR_CAN = 0x75, /* the transmission is aborted by user */
RYM_ERR_ACK = 0x76, /* wrong answer, wrong ACK or C */
RYM_ERR_FILE = 0x77, /* transmit file invalid */
};
/* how many ticks wait for chars between packet. */
#ifndef RYM_WAIT_CHR_TICK
#define RYM_WAIT_CHR_TICK (1000 * 3)
#endif
/* how many ticks wait for between packet. */
#ifndef RYM_WAIT_PKG_TICK
#define RYM_WAIT_PKG_TICK (1000 * 3)
#endif
/* how many ticks between two handshake code. */
#ifndef RYM_CHD_INTV_TICK
#define RYM_CHD_INTV_TICK (1000 * 3)
#endif
/* how many CAN be sent when user active end the session. */
#ifndef RYM_END_SESSION_SEND_CAN_NUM
#define RYM_END_SESSION_SEND_CAN_NUM 0x07
#endif
/* how many retries were made when the error occurred */
#ifndef RYM_MAX_ERRORS
#define RYM_MAX_ERRORS ((size_t)5)
#endif
enum rym_stage {
RYM_STAGE_NONE = 0,
/* set when C is send */
RYM_STAGE_ESTABLISHING,
/* set when we've got the packet 0 and sent ACK and second C */
RYM_STAGE_ESTABLISHED,
/* set when the sender respond to our second C and recviever got a real
* data packet. */
RYM_STAGE_TRANSMITTING,
/* set when the sender send a EOT */
RYM_STAGE_FINISHING,
/* set when transmission is really finished, i.e., after the NAK, C, final
* NULL packet stuff. */
RYM_STAGE_FINISHED,
};
struct rym_ctx;
/* When receiving files, the buf will be the data received from ymodem protocol
* and the len is the data size.
*
* When sending files, the len is the buf size in RYM. The callback need to
* fill the buf with data to send. Returning RYM_CODE_EOT will terminate the
* transfer and the buf will be discarded. Any other return values will cause
* the transfer continue.
*/
typedef enum rym_code(*rym_callback)(struct rym_ctx *ctx, uint8_t *buf, size_t len);
typedef void *(*rym_alloc_callback)(size_t size);
typedef void (*rym_free_callback)(void *ptr);
/**
* @brief 驱动发送
* @param self 来自于调用的rym_ctx引用
* @param offset 发送起始位置偏移
* @param buf 发送的数据起始地址
* @param len 发送的数据长度
* @return 返回实际发送的数据长度
*/
typedef size_t (*rym_driver_write_callback)(struct rym_ctx *self, size_t offset, const uint8_t *buf, size_t len);
/**
* @brief 驱动等待超时的读
* @param self 来自于调用的rym_ctx引用
* @param offset 读取的位置偏移
* @param buf 要读取的数据保存位置的起始地址
* @param len 要读取的数据长度
* @param timeout 超时tick
* @return 返回实际读取的数据长度
*/
typedef size_t (*rym_driver_read_wait_callback)(struct rym_ctx *self, size_t offset, uint8_t *buf, size_t len,
uint32_t timeout);
/* Currently RYM only support one transfer session(ctx) for simplicity.
*
* In case we could support multiple sessions in The future, the first argument
* of APIs are (struct rym_ctx*).
*/
struct rym_ctx {
rym_callback on_data;
rym_callback on_begin;
rym_callback on_end;
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
rym_alloc_callback rym_malloc;
rym_free_callback rym_free;
#endif
/* When error happened, user need to check this to get when the error has
* happened. */
enum rym_stage stage;
/* user could get the error content through this */
uint8_t *buf;
struct {
rym_driver_write_callback rym_write;
/*读取等待*/
rym_driver_read_wait_callback rym_read_wait;
void (*rym_delay_ms)(size_t ms);
uint32_t (*rym_sys_tick_get)(); /*获取系统抵达计数值*/
uint32_t (*rym_millisecond_to_tick)(uint32_t ms); /*毫秒转tick*/
} driver; /*驱动结构体*/
};
/* recv a file on device dev with ymodem session ctx.
*
* If an error happens, you can get where it is failed from ctx->stage.
*
* @param on_begin The callback will be invoked when the first packet arrived.
* This packet often contain file names and the size of the file, if the sender
* support it. So if you want to save the data to a file, you may need to
* create the file on need. It is the on_begin's responsibility to parse the
* data content. The on_begin can be NULL, in which case the transmission will
* continue without any side-effects.
*
* @param on_data The callback will be invoked on the packets received. The
* callback should save the data to the destination. The return value will be
* sent to the sender and in turn, only RYM_{ACK,CAN} is valid. When on_data is
* NULL, RYM will barely send ACK on every packet and have no side-effects.
*
* @param on_end The callback will be invoked when one transmission is
* finished. The data should be 128 bytes of NULL. You can do some cleaning job
* in this callback such as closing the file. The return value of this callback
* is ignored. As above, this parameter can be NULL if you don't need such
* function.
*
* @param handshake_timeout the timeout when hand shaking. The unit is in
* second.
*/
int32_t rym_recv_on_device(struct rym_ctx *ctx,
rym_callback on_begin,
rym_callback on_data,
rym_callback on_end,
int handshake_timeout);
/* send a file on device dev with ymodem session ctx.
*
* If an error happens, you can get where it is failed from ctx->stage.
*
* @param on_begin The callback will be invoked when the first packet is sent.
* This packet often contain file names and the size of the file. It is the
* on_begin's responsibility to parse the basic information of the file. The
* on_begin can not be NULL.
*
* @param on_data The callback will be invoked when the data packets is sent.
* The callback should rym_read file system and prepare the data packets. The
* on_data can not be NULL.
*
* @param on_end The callback will be invoked when one transmission is
* finished. The data should be 128 bytes of NULL. The on_end can not be NULL.
*
* @param handshake_timeout the timeout when hand shaking. The unit is in
* second.
*/
int32_t rym_send_on_device(struct rym_ctx *ctx,
rym_callback on_begin,
rym_callback on_data,
rym_callback on_end,
int handshake_timeout);
#endif
源文件
/*
* COPYRIGHT (C) 2011-2023, Real-Thread Information Technology Ltd
* All rights reserved
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2013-04-14 Grissiom initial implementation
* 2019-12-09 Steven Liu add YMODEM send protocol
*/
#include <malloc.h>
#include "ymodem.h"
#ifdef YMODEM_USING_CRC_TABLE
static const uint16_t ccitt_table[256] =
{
0x0000, 0x1021, 0x2042, 0x3063, 0x4084, 0x50A5, 0x60C6, 0x70E7,
0x8108, 0x9129, 0xA14A, 0xB16B, 0xC18C, 0xD1AD, 0xE1CE, 0xF1EF,
0x1231, 0x0210, 0x3273, 0x2252, 0x52B5, 0x4294, 0x72F7, 0x62D6,
0x9339, 0x8318, 0xB37B, 0xA35A, 0xD3BD, 0xC39C, 0xF3FF, 0xE3DE,
0x2462, 0x3443, 0x0420, 0x1401, 0x64E6, 0x74C7, 0x44A4, 0x5485,
0xA56A, 0xB54B, 0x8528, 0x9509, 0xE5EE, 0xF5CF, 0xC5AC, 0xD58D,
0x3653, 0x2672, 0x1611, 0x0630, 0x76D7, 0x66F6, 0x5695, 0x46B4,
0xB75B, 0xA77A, 0x9719, 0x8738, 0xF7DF, 0xE7FE, 0xD79D, 0xC7BC,
0x48C4, 0x58E5, 0x6886, 0x78A7, 0x0840, 0x1861, 0x2802, 0x3823,
0xC9CC, 0xD9ED, 0xE98E, 0xF9AF, 0x8948, 0x9969, 0xA90A, 0xB92B,
0x5AF5, 0x4AD4, 0x7AB7, 0x6A96, 0x1A71, 0x0A50, 0x3A33, 0x2A12,
0xDBFD, 0xCBDC, 0xFBBF, 0xEB9E, 0x9B79, 0x8B58, 0xBB3B, 0xAB1A,
0x6CA6, 0x7C87, 0x4CE4, 0x5CC5, 0x2C22, 0x3C03, 0x0C60, 0x1C41,
0xEDAE, 0xFD8F, 0xCDEC, 0xDDCD, 0xAD2A, 0xBD0B, 0x8D68, 0x9D49,
0x7E97, 0x6EB6, 0x5ED5, 0x4EF4, 0x3E13, 0x2E32, 0x1E51, 0x0E70,
0xFF9F, 0xEFBE, 0xDFDD, 0xCFFC, 0xBF1B, 0xAF3A, 0x9F59, 0x8F78,
0x9188, 0x81A9, 0xB1CA, 0xA1EB, 0xD10C, 0xC12D, 0xF14E, 0xE16F,
0x1080, 0x00A1, 0x30C2, 0x20E3, 0x5004, 0x4025, 0x7046, 0x6067,
0x83B9, 0x9398, 0xA3FB, 0xB3DA, 0xC33D, 0xD31C, 0xE37F, 0xF35E,
0x02B1, 0x1290, 0x22F3, 0x32D2, 0x4235, 0x5214, 0x6277, 0x7256,
0xB5EA, 0xA5CB, 0x95A8, 0x8589, 0xF56E, 0xE54F, 0xD52C, 0xC50D,
0x34E2, 0x24C3, 0x14A0, 0x0481, 0x7466, 0x6447, 0x5424, 0x4405,
0xA7DB, 0xB7FA, 0x8799, 0x97B8, 0xE75F, 0xF77E, 0xC71D, 0xD73C,
0x26D3, 0x36F2, 0x0691, 0x16B0, 0x6657, 0x7676, 0x4615, 0x5634,
0xD94C, 0xC96D, 0xF90E, 0xE92F, 0x99C8, 0x89E9, 0xB98A, 0xA9AB,
0x5844, 0x4865, 0x7806, 0x6827, 0x18C0, 0x08E1, 0x3882, 0x28A3,
0xCB7D, 0xDB5C, 0xEB3F, 0xFB1E, 0x8BF9, 0x9BD8, 0xABBB, 0xBB9A,
0x4A75, 0x5A54, 0x6A37, 0x7A16, 0x0AF1, 0x1AD0, 0x2AB3, 0x3A92,
0xFD2E, 0xED0F, 0xDD6C, 0xCD4D, 0xBDAA, 0xAD8B, 0x9DE8, 0x8DC9,
0x7C26, 0x6C07, 0x5C64, 0x4C45, 0x3CA2, 0x2C83, 0x1CE0, 0x0CC1,
0xEF1F, 0xFF3E, 0xCF5D, 0xDF7C, 0xAF9B, 0xBFBA, 0x8FD9, 0x9FF8,
0x6E17, 0x7E36, 0x4E55, 0x5E74, 0x2E93, 0x3EB2, 0x0ED1, 0x1EF0
};
static uint16_t CRC16(unsigned char *q, int len)
{
uint16_t crc = 0;
while (len-- > 0)
crc = (crc << 8) ^ ccitt_table[((crc >> 8) ^ *q++) & 0xff];
return crc;
}
#else
static uint16_t CRC16(unsigned char *q, int len) {
uint16_t crc;
char i;
crc = 0;
while (--len >= 0) {
crc = crc ^ (int) *q++ << 8;
i = 8;
do {
if (crc & 0x8000)
crc = crc << 1 ^ 0x1021;
else
crc = crc << 1;
} while (--i);
}
return (crc);
}
#endif
// we could only use global varible because we could not use
// rt_device_t->user_data(it is used by the serial driver)...
static struct rym_ctx *_rym_the_ctx;
/* SOH/STX + seq + payload + crc */
#define _RYM_SOH_PKG_SZ (1+2+128+2)
#define _RYM_STX_PKG_SZ (1+2+1024+2)
#ifndef RYM_CTX_USE_ALLOC_CALLBACK
static uint8_t rym_static_buff[_RYM_STX_PKG_SZ];
#endif
static inline size_t rym_read(struct rym_ctx *self, size_t offset, uint8_t *buf, size_t len) {
return self->driver.rym_read_wait(self, offset, buf, len, 0);
}
static enum rym_code _rym_read_code(
struct rym_ctx *ctx,
uint32_t timeout) {
/* Fast path */
if (rym_read(ctx, 0, ctx->buf, 1) == 1)
return (enum rym_code) (*ctx->buf);
/* Slow path */
do {
size_t rsz = ctx->driver.rym_read_wait(ctx, 0, ctx->buf, 1, timeout);
if (rsz == 1)
return (enum rym_code) (*ctx->buf);
else
return RYM_CODE_NONE;
} while (1);
}
/* the caller should at least alloc _RYM_STX_PKG_SZ buffer */
static size_t _rym_read_data(
struct rym_ctx *ctx,
size_t len) {
/* we should already have had the code */
uint8_t *buf = ctx->buf + 1;
size_t readlen = 0;
while (1) {
size_t rec = ctx->driver.rym_read_wait(ctx, 0,
buf + readlen,
len - readlen, RYM_WAIT_CHR_TICK);
if (rec <= 0)return readlen; /*没有接收到数据直接返回*/
readlen += rec;
if (readlen >= len) return readlen; /*判断数据是否接收完成*/
}
return readlen;
}
static int32_t _rym_send_packet(
struct rym_ctx *ctx,
enum rym_code code,
uint8_t index) {
uint16_t send_crc;
uint8_t index_inv = ~index;
size_t writelen = 0;
size_t packetlen = 0;
switch (code) {
case RYM_CODE_SOH:
packetlen = _RYM_SOH_PKG_SZ;
break;
case RYM_CODE_STX:
packetlen = _RYM_STX_PKG_SZ;
break;
default:
return -YMODEM_ERROR;
}
send_crc = CRC16(ctx->buf + 3, packetlen - 5);
ctx->buf[0] = code;
ctx->buf[1] = index;
ctx->buf[2] = index_inv;
ctx->buf[packetlen - 2] = (uint8_t) (send_crc >> 8);
ctx->buf[packetlen - 1] = (uint8_t) send_crc & 0xff;
do {
writelen += ctx->driver.rym_write(ctx, 0, ctx->buf + writelen, packetlen - writelen);
} while (writelen < packetlen);
return YMODEM_OK;
}
static size_t _rym_putchar(struct rym_ctx *ctx, uint8_t code) {
ctx->driver.rym_write(ctx, 0, &code, sizeof(code));
return 1;
}
static size_t _rym_getchar(struct rym_ctx *ctx) {
uint8_t getc_ack;
while (rym_read(ctx, 0, &getc_ack, 1) != 1) {
/*等待获取到数据的信号通知*/
// rt_sem_take(&ctx->sem, RT_WAITING_FOREVER);
ctx->driver.rym_delay_ms(1);
}
return getc_ack;
}
static int32_t _rym_do_handshake(
struct rym_ctx *ctx,
int tm_sec) {
enum rym_code code;
size_t i;
uint16_t recv_crc, cal_crc;
size_t data_sz;
uint32_t tick;
ctx->stage = RYM_STAGE_ESTABLISHING;
/* send C every second, so the sender could know we are waiting for it. */
for (i = 0; i < tm_sec; i++) {
_rym_putchar(ctx, RYM_CODE_C);
code = _rym_read_code(ctx,
RYM_CHD_INTV_TICK);
if (code == RYM_CODE_SOH) {
data_sz = _RYM_SOH_PKG_SZ;
break;
} else if (code == RYM_CODE_STX) {
data_sz = _RYM_STX_PKG_SZ;
break;
}
}
if (i == tm_sec) {
return -RYM_ERR_TMO;
}
/* receive all data */
i = 0;
/* automatic exit after receiving specified length data, timeout: 100ms */
tick = ctx->driver.rym_sys_tick_get();
uint32_t rec_tick = ctx->driver.rym_millisecond_to_tick(100);
while (ctx->driver.rym_sys_tick_get() <= (tick + rec_tick) && i < (data_sz - 1)) {
i += _rym_read_data(ctx, data_sz - 1);
ctx->driver.rym_delay_ms(5);
}
if (i != (data_sz - 1))
return -RYM_ERR_DSZ;
/* sanity check */
if (ctx->buf[1] != 0 || ctx->buf[2] != 0xFF)
return -RYM_ERR_SEQ;
recv_crc = (uint16_t) (*(ctx->buf + data_sz - 2) << 8) | *(ctx->buf + data_sz - 1);
cal_crc = CRC16(ctx->buf + 3, data_sz - 5);
if (recv_crc != cal_crc)
return -RYM_ERR_CRC;
/* congratulations, check passed. */
if (ctx->on_begin && ctx->on_begin(ctx, ctx->buf + 3, data_sz - 5) != RYM_CODE_ACK)
return -RYM_ERR_CAN;
return YMODEM_OK;
}
static int32_t _rym_do_send_handshake(
struct rym_ctx *ctx,
int tm_sec) {
enum rym_code code;
size_t i;
size_t data_sz;
uint8_t index = 0;
uint8_t getc_ack;
ctx->stage = RYM_STAGE_ESTABLISHING;
data_sz = _RYM_SOH_PKG_SZ;
/* receive C every second */
for (i = 0; i < tm_sec; i++) {
code = _rym_read_code(ctx,
RYM_CHD_INTV_TICK);
if (code == RYM_CODE_C) {
break;
}
}
if (i == tm_sec) {
return -RYM_ERR_TMO;
}
/* congratulations, check passed. */
if (ctx->on_begin && ctx->on_begin(ctx, ctx->buf + 3, data_sz - 5) != RYM_CODE_SOH)
return -RYM_ERR_CODE;
code = RYM_CODE_SOH;
_rym_send_packet(ctx, code, index);
getc_ack = _rym_getchar(ctx);
if (getc_ack != RYM_CODE_ACK) {
return -RYM_ERR_ACK;
}
getc_ack = _rym_getchar(ctx);
if (getc_ack != RYM_CODE_C) {
return -RYM_ERR_ACK;
}
ctx->stage = RYM_STAGE_ESTABLISHED;
return YMODEM_OK;
}
static int32_t _rym_trans_data(
struct rym_ctx *ctx,
size_t data_sz,
enum rym_code *code) {
const size_t tsz = 2 + data_sz + 2;
uint16_t recv_crc;
/* seq + data + crc */
size_t i = _rym_read_data(ctx, tsz);
if (i != tsz)
return -RYM_ERR_DSZ;
if ((ctx->buf[1] + ctx->buf[2]) != 0xFF) {
return -RYM_ERR_SEQ;
}
/* As we are sending C continuously, there is a chance that the
* sender(remote) receive an C after sending the first handshake package.
* So the sender will interpret it as NAK and re-send the package. So we
* just ignore it and proceed. */
if (ctx->stage == RYM_STAGE_ESTABLISHED && ctx->buf[1] == 0x00) {
*code = RYM_CODE_NONE;
return YMODEM_OK;
}
ctx->stage = RYM_STAGE_TRANSMITTING;
/* sanity check */
recv_crc = (uint16_t) (*(ctx->buf + tsz - 1) << 8) | *(ctx->buf + tsz);
if (recv_crc != CRC16(ctx->buf + 3, data_sz))
return -RYM_ERR_CRC;
/* congratulations, check passed. */
if (ctx->on_data)
*code = ctx->on_data(ctx, ctx->buf + 3, data_sz);
else
*code = RYM_CODE_ACK;
return YMODEM_OK;
}
static int32_t _rym_do_trans(struct rym_ctx *ctx) {
_rym_putchar(ctx, RYM_CODE_ACK);
_rym_putchar(ctx, RYM_CODE_C);
ctx->stage = RYM_STAGE_ESTABLISHED;
size_t errors = 0;
while (1) {
int32_t err;
enum rym_code code;
size_t data_sz, i;
code = _rym_read_code(ctx,
RYM_WAIT_PKG_TICK);
switch (code) {
case RYM_CODE_SOH:
data_sz = 128;
break;
case RYM_CODE_STX:
data_sz = 1024;
break;
case RYM_CODE_EOT:
return YMODEM_OK;
default:
errors++;
if (errors > RYM_MAX_ERRORS) {
return -RYM_ERR_CODE;/* Abort communication */
} else {
_rym_putchar(ctx, RYM_CODE_NAK);/* Ask for a packet */
continue;
}
};
err = _rym_trans_data(ctx, data_sz, &code);
if (err != YMODEM_OK) {
errors++;
if (errors > RYM_MAX_ERRORS) {
return err;/* Abort communication */
} else {
_rym_putchar(ctx, RYM_CODE_NAK);/* Ask for a packet */
continue;
}
} else {
errors = 0;
}
switch (code) {
case RYM_CODE_CAN:
/* the spec require multiple CAN */
for (i = 0; i < RYM_END_SESSION_SEND_CAN_NUM; i++) {
_rym_putchar(ctx, RYM_CODE_CAN);
}
return -RYM_ERR_CAN;
case RYM_CODE_ACK:
_rym_putchar(ctx, RYM_CODE_ACK);
break;
default:
// wrong code
break;
};
}
}
static int32_t _rym_do_send_trans(struct rym_ctx *ctx) {
ctx->stage = RYM_STAGE_TRANSMITTING;
enum rym_code code;
size_t data_sz;
uint32_t index = 1;
uint8_t getc_ack;
data_sz = _RYM_STX_PKG_SZ;
while (1) {
if (!ctx->on_data) {
return -RYM_ERR_CODE;
}
code = ctx->on_data(ctx, ctx->buf + 3, data_sz - 5);
_rym_send_packet(ctx, code, index);
index++;
getc_ack = _rym_getchar(ctx);
if (getc_ack != RYM_CODE_ACK) {
return -RYM_ERR_ACK;
}
if (ctx->stage == RYM_STAGE_FINISHING)
break;
}
return YMODEM_OK;
}
static int32_t _rym_do_fin(struct rym_ctx *ctx) {
enum rym_code code;
uint16_t recv_crc;
size_t i;
size_t data_sz;
ctx->stage = RYM_STAGE_FINISHING;
/* we already got one EOT in the caller. invoke the callback if there is
* one. */
if (ctx->on_end)
ctx->on_end(ctx, ctx->buf + 3, 128);
_rym_putchar(ctx, RYM_CODE_NAK);
code = _rym_read_code(ctx, RYM_WAIT_PKG_TICK);
if (code != RYM_CODE_EOT)
return -RYM_ERR_CODE;
_rym_putchar(ctx, RYM_CODE_ACK);
_rym_putchar(ctx, RYM_CODE_C);
code = _rym_read_code(ctx, RYM_WAIT_PKG_TICK);
if (code == RYM_CODE_SOH) {
data_sz = _RYM_SOH_PKG_SZ;
} else if (code == RYM_CODE_STX) {
data_sz = _RYM_STX_PKG_SZ;
} else
return -RYM_ERR_CODE;
i = _rym_read_data(ctx, _RYM_SOH_PKG_SZ - 1);
if (i != (_RYM_SOH_PKG_SZ - 1))
return -RYM_ERR_DSZ;
/* sanity check
*/
if (ctx->buf[1] != 0 || ctx->buf[2] != 0xFF)
return -RYM_ERR_SEQ;
recv_crc = (uint16_t) (*(ctx->buf + _RYM_SOH_PKG_SZ - 2) << 8) | *(ctx->buf + _RYM_SOH_PKG_SZ - 1);
if (recv_crc != CRC16(ctx->buf + 3, _RYM_SOH_PKG_SZ - 5))
return -RYM_ERR_CRC;
/*next file transmission*/
if (ctx->buf[3] != 0) {
if (ctx->on_begin && ctx->on_begin(ctx, ctx->buf + 3, data_sz - 5) != RYM_CODE_ACK)
return -RYM_ERR_CAN;
return YMODEM_OK;
}
/* congratulations, check passed. */
ctx->stage = RYM_STAGE_FINISHED;
/* put the last ACK */
_rym_putchar(ctx, RYM_CODE_ACK);
return YMODEM_OK;
}
static int32_t _rym_do_send_fin(struct rym_ctx *ctx) {
enum rym_code code;
size_t data_sz;
uint8_t index = 0;
uint8_t getc_ack;
data_sz = _RYM_SOH_PKG_SZ;
_rym_putchar(ctx, RYM_CODE_EOT);
getc_ack = _rym_getchar(ctx);
if (getc_ack != RYM_CODE_NAK) {
return -RYM_ERR_ACK;
}
_rym_putchar(ctx, RYM_CODE_EOT);
getc_ack = _rym_getchar(ctx);
if (getc_ack != RYM_CODE_ACK) {
return -RYM_ERR_ACK;
}
getc_ack = _rym_getchar(ctx);
if (getc_ack != RYM_CODE_C) {
return -RYM_ERR_ACK;
}
if (ctx->on_end && ctx->on_end(ctx, ctx->buf + 3, data_sz - 5) != RYM_CODE_SOH)
return -RYM_ERR_CODE;
code = RYM_CODE_SOH;
_rym_send_packet(ctx, code, index);
ctx->stage = RYM_STAGE_FINISHED;
return YMODEM_OK;
}
static int32_t _rym_do_recv(
struct rym_ctx *ctx,
int handshake_timeout) {
int32_t err;
ctx->stage = RYM_STAGE_NONE;
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->buf = ctx->rym_malloc(_RYM_STX_PKG_SZ);
#else
ctx->buf = rym_static_buff;
#endif
if (ctx->buf == NULL)
return -YMODEM_NO_MEM;
err = _rym_do_handshake(ctx, handshake_timeout);
if (err != YMODEM_OK) {
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
while (1) {
err = _rym_do_trans(ctx);
err = _rym_do_fin(ctx);
if (err != YMODEM_OK) {
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
if (ctx->stage == RYM_STAGE_FINISHED)
break;
}
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
static int32_t _rym_do_send(
struct rym_ctx *ctx,
int handshake_timeout) {
int32_t err;
ctx->stage = RYM_STAGE_NONE;
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->buf = ctx->rym_malloc(_RYM_STX_PKG_SZ);
#else
ctx->buf = rym_static_buff;
#endif
if (ctx->buf == NULL)
return -YMODEM_NO_MEM;
err = _rym_do_send_handshake(ctx, handshake_timeout);
if (err != YMODEM_OK) {
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
err = _rym_do_send_trans(ctx);
if (err != YMODEM_OK) {
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
err = _rym_do_send_fin(ctx);
if (err != YMODEM_OK) {
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
ctx->rym_free(ctx->buf);
#endif
return err;
}
int32_t rym_recv_on_device(
struct rym_ctx *ctx,
rym_callback on_begin,
rym_callback on_data,
rym_callback on_end,
int handshake_timeout) {
int32_t res = 0;
YEMODEM_ASSERT(_rym_the_ctx == 0);
_rym_the_ctx = ctx;
ctx->on_begin = on_begin;
ctx->on_data = on_data;
ctx->on_end = on_end;
{
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
if (!ctx->rym_malloc || !ctx->rym_free) {
ctx->rym_malloc = malloc;
ctx->rym_free = free;
}
#endif
if (ctx->driver.rym_delay_ms == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_write == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_read_wait == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_sys_tick_get == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_millisecond_to_tick == NULL) return YMODEM_ERROR;
}
res = _rym_do_recv(ctx, handshake_timeout);
_rym_the_ctx = NULL;
return res;
}
int32_t rym_send_on_device(
struct rym_ctx *ctx,
rym_callback on_begin,
rym_callback on_data,
rym_callback on_end,
int handshake_timeout) {
int32_t res = 0;
YEMODEM_ASSERT(_rym_the_ctx == 0);
_rym_the_ctx = ctx;
ctx->on_begin = on_begin;
ctx->on_data = on_data;
ctx->on_end = on_end;
{
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
if (!ctx->rym_malloc || !ctx->rym_free) {
ctx->rym_malloc = malloc;
ctx->rym_free = free;
}
#endif
if (ctx->driver.rym_delay_ms == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_write == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_read_wait == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_sys_tick_get == NULL) return YMODEM_ERROR;
if (ctx->driver.rym_millisecond_to_tick == NULL) return YMODEM_ERROR;
}
res = _rym_do_send(ctx, handshake_timeout);
_rym_the_ctx = NULL;
return res;
}
对接letter-shell组件(自动注入的方式)
/*
* Copyright (c) 2024-2024,shchl
*
* SPDX-License-Identifier: Apache-2.0
*
* Change Logs:
* Date Author Notes
* 2024-4-16 shchl first version
*/
#include "includes.h"
#include "ymodem.h"
static char upload_file_name[64] = {0};
static size_t update_file_total_size;
static size_t rec_data_len = 0;
extern uint32_t SystemCoreClock;
static enum rym_code ymodem_on_begin(struct rym_ctx *ctx, uint8_t *buf, size_t len) {
static char *tmp_file_name, *file_size;
/* calculate and store file size */
tmp_file_name = (char *) &buf[0];
file_size = (char *) &buf[strlen(tmp_file_name) + 1];
memcpy(upload_file_name, tmp_file_name, strlen(tmp_file_name));
update_file_total_size = atol(file_size);
return RYM_CODE_ACK;
}
static enum rym_code ymodem_on_data(struct rym_ctx *ctx, uint8_t *buf, size_t len) {
/*TODO 接收升级数据包处理*/
rec_data_len += len;
return RYM_CODE_ACK;
}
static void rym_delay_ms(size_t ms) {
tx_thread_sleep(ms);
}
static uint32_t rym_sys_tick_get() {
return tx_time_get();
}
static uint32_t rym_millisecond_to_tick(uint32_t ms) {
#define TICK_PER_SECOND 1000
uint32_t tick;
tick = TICK_PER_SECOND * (ms / 1000);
tick += (TICK_PER_SECOND * (ms % 1000) + 999) / 1000;
/* return the calculated tick */
return tick;
}
static size_t rym_write(struct rym_ctx *self, size_t offset, const uint8_t *buf, size_t len) {
comSendBuf(COM1, (uint8_t *) (buf + offset), len);
return len;
}
static size_t rym_read_wait(struct rym_ctx *self, size_t offset, uint8_t *buf, size_t len,
uint32_t timeout) {
UNUSED(self);
size_t readCnt = 0;
uint32_t cur_tick = rym_sys_tick_get();
while (len) {
if (comGetChar(COM1, (uint8_t *) (buf + readCnt + offset)) == 1) {
readCnt++;
len--;
} else {
if (rym_sys_tick_get() > cur_tick + timeout) {
break;
}
}
}
return readCnt;
}
static inline void ota_ymodem_lock() {
/*由于shell 组件中已做了加锁处理,这里就可以不需要进行加锁*/
}
static inline void ota_ymodem_unlock() {
/*由于shell 组件中已做了加锁处理,这里就可以不需要进行解锁*/
}
void console_ota_func() {
struct rym_ctx rctx;
/*变量重新初始化*/
{
memset(upload_file_name, 0, strlen(upload_file_name));/*清除上次的文件名*/
rec_data_len = 0;
}
rctx.driver.rym_delay_ms = rym_delay_ms;
rctx.driver.rym_sys_tick_get = rym_sys_tick_get;
rctx.driver.rym_millisecond_to_tick = rym_millisecond_to_tick;
rctx.driver.rym_write = rym_write;
rctx.driver.rym_read_wait = rym_read_wait;
/*内存分配*/
#ifdef RYM_CTX_USE_ALLOC_CALLBACK
rctx.rym_malloc = (void *(*)(size_t)) app_malloc;
rctx.rym_free = (void (*)(void *)) app_free;
#endif
ota_ymodem_lock();/*加锁*/
int32_t status = rym_recv_on_device(&rctx,
ymodem_on_begin,
ymodem_on_data,
NULL, 1000);
/*todo 是否需要重启芯片(针对于ota升级)*/
ota_ymodem_unlock();/*解锁*/
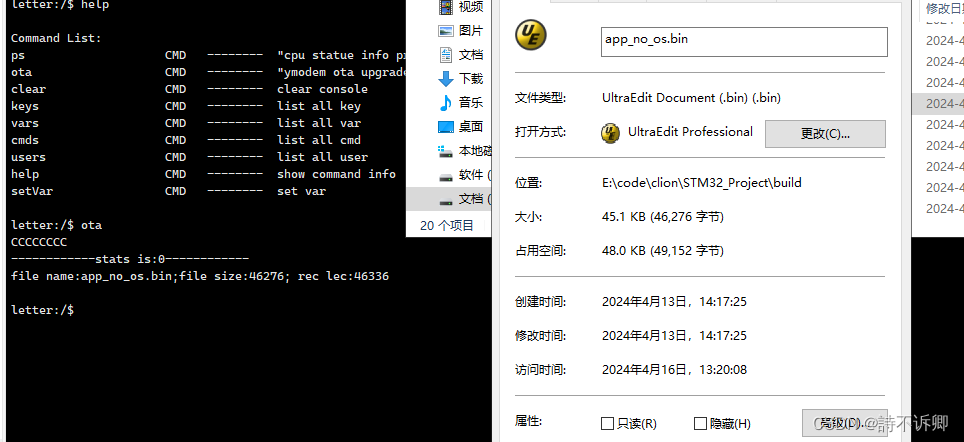
tx_log("\r\nstats is:%d\r\n", status);
tx_log("file name:%s;file size:%d; rec lec:%d\r\n", upload_file_name, update_file_total_size, rec_data_len);
}
#ifdef SHELL_USING_CMD_EXPORT
/*shell 脚本来管理*/
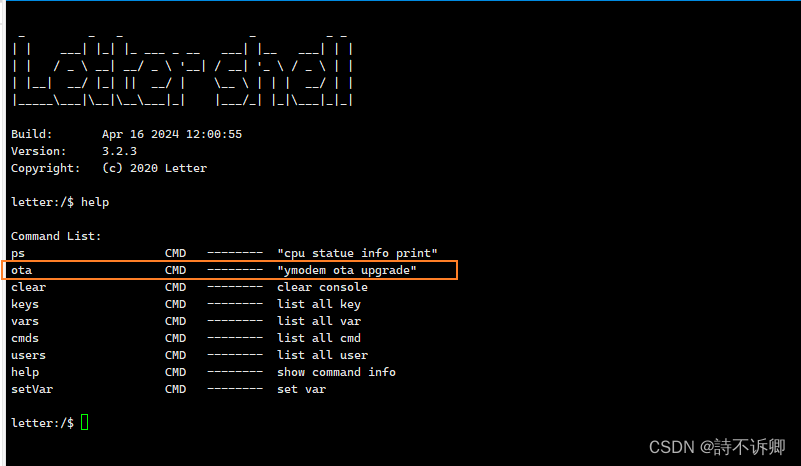
SHELL_EXPORT_CMD(SHELL_CMD_PERMISSION(0) | SHELL_CMD_TYPE(SHELL_TYPE_CMD_FUNC) | SHELL_CMD_DISABLE_RETURN,
ota, console_ota_func, "ymodem ota upgrade");
#endif
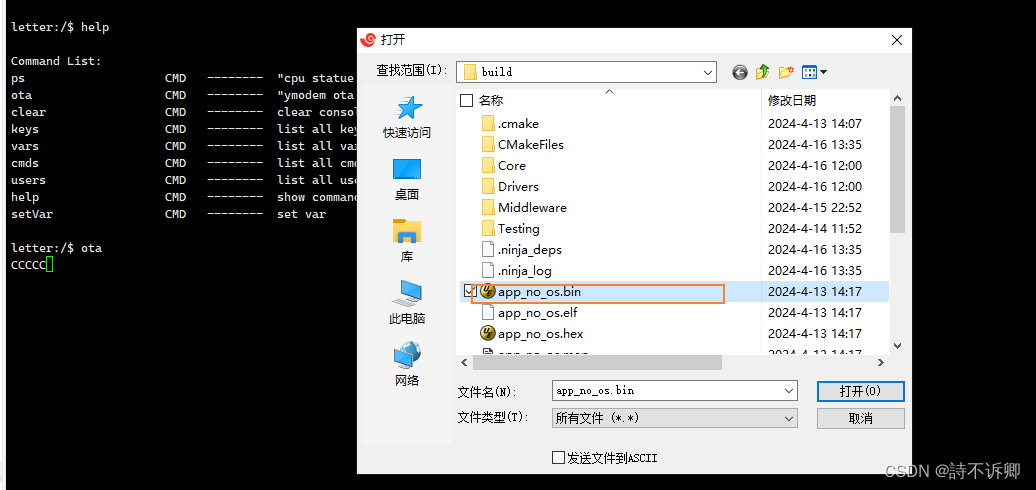
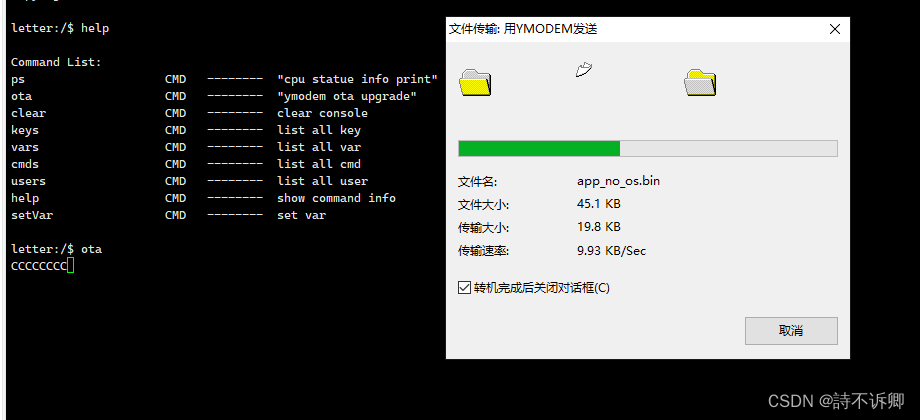
测试(ok)
总结
- ymodem 协议组件已可以在裸机上运行,只需要修改对接letter-shell组件的回调函数即可

















 2277
2277











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











