









 DCL-SLAM是一个完全分布式的多机器人SLAM解决方案,它包含单机器人的前端、分布式回环检测和分布式后端。系统采用轻量级的LiDAR-Iris描述子进行数据交换,通过三步走的回环检测策略提高准确性并降低带宽需求。分布式后端使用PCM算法去除回环检测中的异常值,通过DGS方法进行位姿图优化,确保在大规模集群中的稳健性能。
DCL-SLAM是一个完全分布式的多机器人SLAM解决方案,它包含单机器人的前端、分布式回环检测和分布式后端。系统采用轻量级的LiDAR-Iris描述子进行数据交换,通过三步走的回环检测策略提高准确性并降低带宽需求。分布式后端使用PCM算法去除回环检测中的异常值,通过DGS方法进行位姿图优化,确保在大规模集群中的稳健性能。
Abstract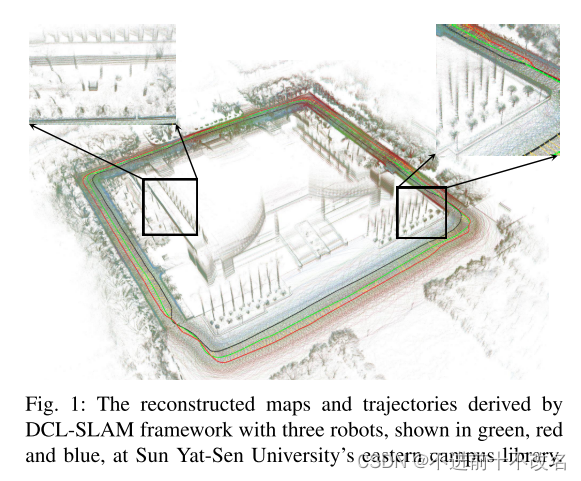
DCL-SLAM三个部分组成1)单机器人的前端2)分布式的回环模块,检测多机器人间的重合位置3)分布式的后端位姿优化模块,丢弃虚假的回环测量
主要贡献:更高的准确率和更加低的带宽
Introduction
分析了其他的系统的不足,很多系统都不支持大规模的多机器人集群。
DCL-SLAM专注于机器人间数据的有效性和弹性,通过部分的位姿测量和间接数据关联实现一致的轨迹测量。
描述子方面使用的是轻量化的LiDAR-Iris。
**设计了三步走的数据有效性的分布式回环检测方法。去除冗余的机器人间的回环检测,**增强了鲁棒性。所有的观测值都是使用DGS方法来实现优化,这个方法需要机器人间交换的信息最少。
最后在KITTI数据集和自己的数据集中进行实现,同时也做了网络的稳定性实验。
DCL-SLAM 的主要贡献:
1)完全分布式的多机器人激光SLAM,支持任何传感器,场景和平台
2)高集成度的数据有效性的机器人间回环检测方法。
3)做了很多的实验。
Relative Work
(只写我觉得有用的)对于多机器人,之间的交流直接传描述子可以更加节省带宽。
outliter方法:RANSAC 和 PCM
可以看下Door-SLAM,他使用了PCM方法来去除outliter
The DCL-SLAM FRAMEWORK
整个机器人系统一共有三个部分,单机器人的前端,分布式的回环检测和分布式的后端。每个机器人之间的交流包括描述子(LiDAR-Iris),是为了用来检测机器人间的回环检测的。在回环检测是使用原始点云或者是特征点云通过ICP和RANSAC来获得机器人间的回环检测的。
A. Single-robot Front-end
为了提高单机器人前端的准确度,机器人内部也会进行回环检测。内部的回环检测得到出来的factor,也会加入到位姿图优化当中去。
B. Distributed Loop Closure
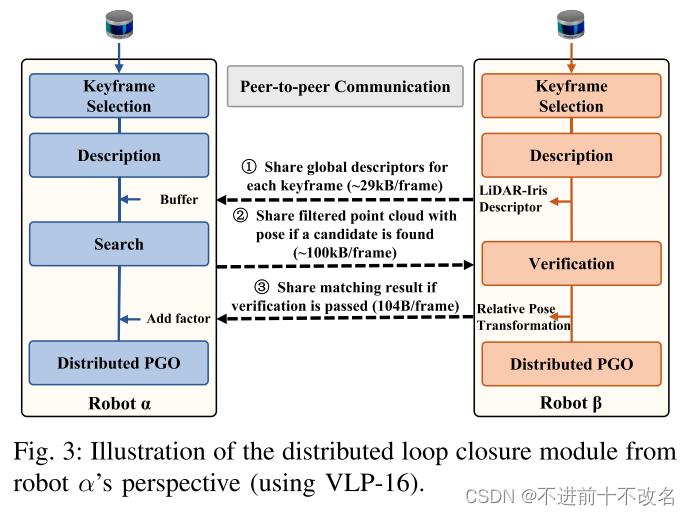
分布式的回环检测一共分为三步:关键帧选取,提取描述子,搜索和验证。
关键帧选取:机器人位移和旋转一段距离,超过阈值之后会提取一帧作为关键帧。
回环检测:1)共享各帧的描述子 2)搜索Search 3)验证Verification
Description
使用(LiDAR-Iris)描述子,也是和ORB那样的一个二进制数,一共8位。机器人b发送描述子给机器人a,在a中匹配
Search
通过hamming距离匹配,小于阈值的就是配对的特征点。将匹配的结果从机器人a发送回给机器人b。
Verification
剔出不合法的配对点。使用RANSAC和ICP来进行估算位姿和剔出不合法的配对点。机器人b将相对位姿和机器人间的回环factor发送给机器人a。
C. Distributed Back-end
分布式后端包括两个模块:1)去除机器人间回环的冗余 2)进行位姿图优化,优化全局的机器人集群位姿。
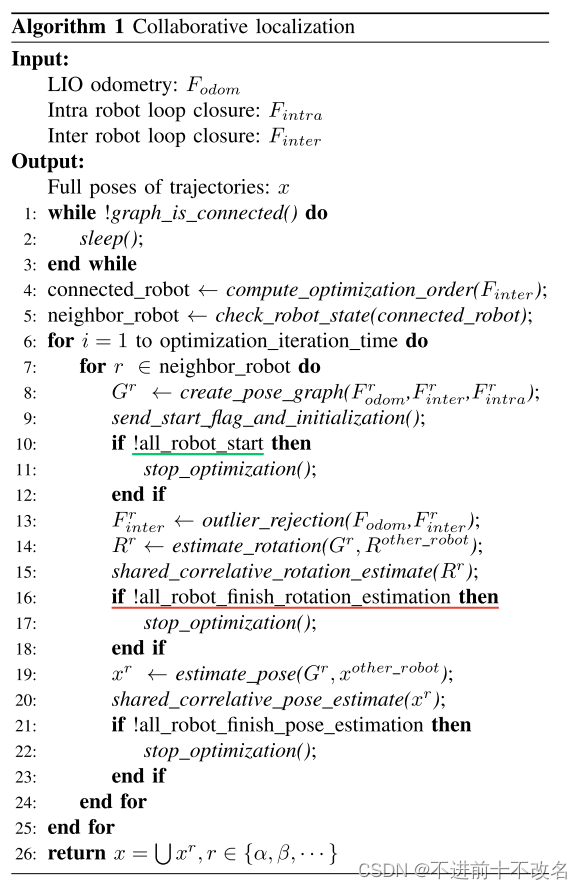
分布式后端的协同定位算法:
Outlier Rejection.
利用PCM算法来检测回环匹配对的一致性。
z_{ai}{aj}是回环检测的匹配对,i时刻到j时刻的位姿变换。
Pose Graph Optimization


利用最大似然估计来实现。其中z_{ai}{bj}是机器人a在i时刻和机器人b在j时刻之间的匹配位姿。
具体实现论文没有详细说,是借鉴了另外一篇论文的DGS方法。
《“Distributed trajectory estimation with privacy and commu-
nication constraints: a two-stage distributed gauss-seidel approach,》


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









