







 本文介绍了如何使用MoveIt库进行机械臂的控制,包括测试ArbotiX控制器、避障规划和实现pick and place操作。此外,还详细讲解了在Gazebo中对机械臂进行仿真的过程。
本文介绍了如何使用MoveIt库进行机械臂的控制,包括测试ArbotiX控制器、避障规划和实现pick and place操作。此外,还详细讲解了在Gazebo中对机械臂进行仿真的过程。
(1)测试ArbotiX控制器的效果
启动机器人模型,控制器,以及rviz:
roslaunch marm_description fake_arm.launch
让机器人平滑移动到目标姿态:
rosrun marm_planning trajectory_demo.py _reset:=False
让机器人平滑移动到初始姿态:
rosrun marm_planning trajectory_demo.py _reset:=True
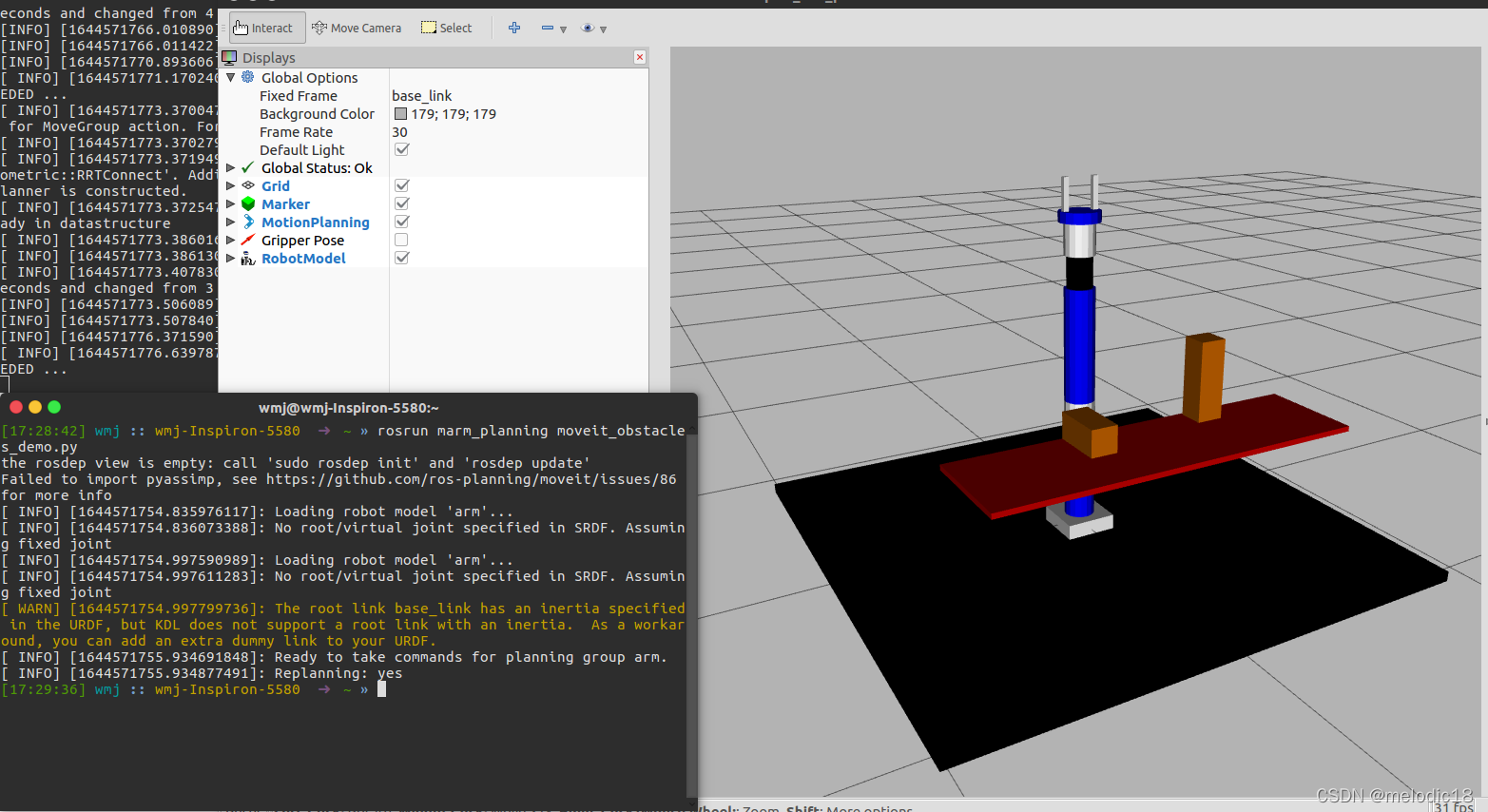
(2)避障规划
roslaunch marm_planning arm_planning.launch
rosrun marm_planning moveit_obstacles_demo.py
(3)pick and place示例
roslaunch marm_planning arm_planning.launch
rosrun marm_planning moveit_pick_and_place_demo.py
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











