






最近在搞机器人编码器机箱故障,对编码器进行资料的搜索,记录下怕忘了
还好现场接触了两类编码器,增量式和绝对式
1、增量式

(1)速度的问题
增量式编码器主要应用与生产现场的机运链控制反馈,以脉冲表单光源系统为例,其原理是转轴转动带动码盘转动,码盘上有开窗,随着电机转动,在接收器上能形成高低电平信号,随着转速的不同,高低电平持续时间是不同的,但是相邻的高电平之间的码盘角度是一样的,这样就可以通过接收的电平信号时间函数,建立码盘的速度函数,解决了速度的问题
(2)方向的问题
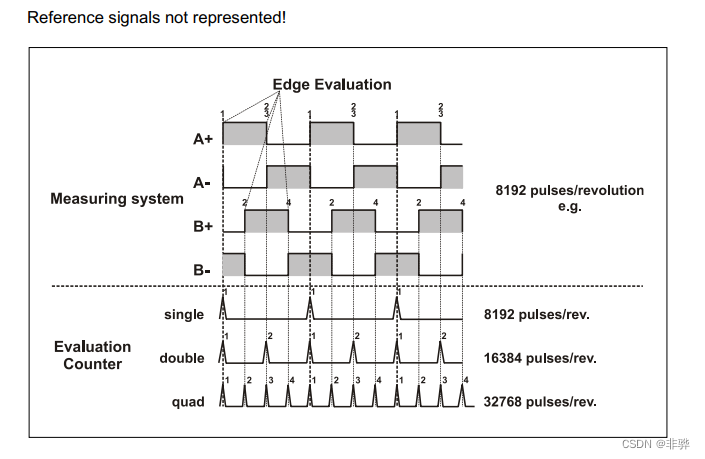
编码器接收端设置两个通道,两通道间间隔小于一个高电平周期,保证俩接收信号不同步,如图,假设是正向,A先高-B再高,如果是反向,B先高-A再高,从而确定正反
(3)位移的问题
假设高电平接受8192个脉冲,程序便可计数脉冲数确定转了几圈,从而确定位移
2、绝对式
光电式编码器

(1)位移

圆盘上分布不同的光格,比如圆盘有12条轨道,那么就可以分成2^12个不同配比,相当于一圈可以分成2^12个等份,每份通过接收器读出的数据都是不一样的,比如假设0°读出000000000000,过了0.087°,读出来就变成了000000000001,以此类推,那么就可以根据读出的值确定轴转了多少度,即使断电再上电,读一下值就可以了

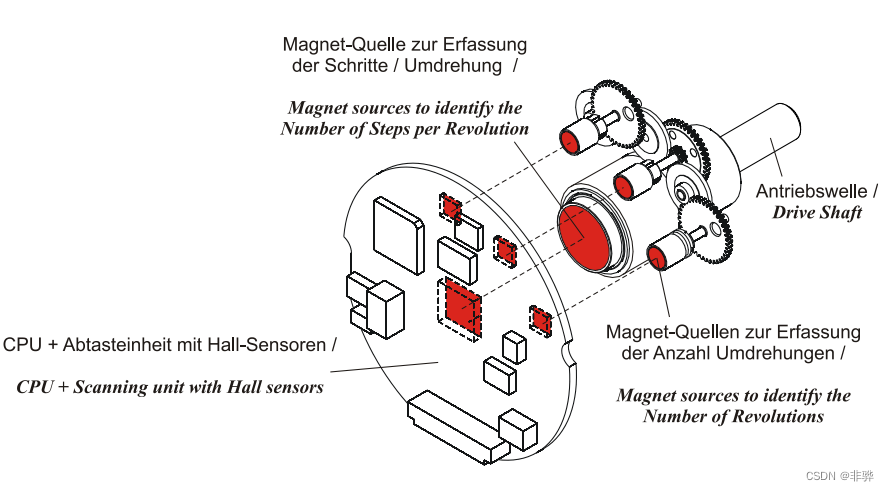
然后通过固定的齿轮传动比配合霍尔传感器就可以记录转了多少圈,3个可能是用于更加精确记录
(2)速度
速度是实时,既然配合以上得到编码器位移,除以时间便能得到速度
(3)方向
根据读出的值编码值便可确定,比如1.2.3...是正方向,那么...3.2.1便是反方向
磁感应式
与光电式类似,就跟磁带一样计数扫描
















 3122
3122











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









