







开启中断流程
Kernel.S
用汇编语言实现中断处理程序
[bits 32]
;定义单行的宏,%define
%define ERROR_CODE nop ; 若在相关的异常中cpu已经自动压入了错误码,为保持栈中格式统一,这里不做操作.
%define ZERO push 0 ; 若在相关的异常中cpu没有压入错误码,为了统一栈中格式,就手工压入一个0
extern put_str;声明外部函数
extern idt_table;
section .data ;定义节,表示是同一段属性的数据,直到下一个section出现
global intr_entry_table ;定义一个全局数组
intr_entry_table:
;多行宏定义,有两个参数。%后面的代表参数顺序
%macro VECTOR 2
section .text
intr%1entry: ; 每个中断处理程序都要压入中断向量号,所以一个中断类型一个中断处理程序,自己知道自己的中断向量号是多少,%1是中断向量号
;**表示一个中断程序的起始地址**
%2 ; 中断若有错误码会压在eip后面 ,这里是开头的宏定义,ERROR_CODE或ZERO,为了使有无错误码压入栈的字节都是一样的
;保证栈顶指针一致
push intr_str ;输入参数
call put_str ;调用函数
add esp, 4 ;跳过参数
; 如果是从片上进入的中断,除了往从片上发送EOI外,还要往主片上发送EOI
mov al,0x20 ; 中断结束命令EOI
out 0xa0,al ; 向从片发送
out 0x20,al ; 向主片发送
push %1 ; 不管idt_table中的目标程序是否需要参数,都一律压入中断向量号,调试时很方便
call [idt_table + %1*4] ; 调用idt_table中的C版本中断处理函数
jmp intr_exit
section .data
dd intr%1entry ; **存储各个中断入口程序的地址**,形成intr_entry_table数组,将这个起始地址存储到数组中
%endmacro;结束宏
;上面的宏定义的中断处理程序,都是使用put_str打印字符
VECTOR 0x0 ,ZERO
VECTOR 0X1 ,ZERO
VECTOR 0X2 ,ZERO
VECTOR 0x3 ,ZERO
VECTOR 0X4 ,ZERO
VECTOR 0X5 ,ZERO
VECTOR 0x6 ,ZERO
VECTOR 0X7 ,ZERO
VECTOR 0X8 ,ERROR_CODE
VECTOR 0x9 ,ZERO
VECTOR 0XA ,ERROR_CODE
VECTOR 0XB ,ERROR_CODE
VECTOR 0XC ,ERROR_CODE
VECTOR 0XD ,ERROR_CODE
VECTOR 0XE ,ERROR_CODE
VECTOR 0XF ,ZERO
VECTOR 0X10 ,ZERO
VECTOR 0X11 ,ERROR_CODE
VECTOR 0x12 ,ZERO
VECTOR 0X13 ,ZERO
VECTOR 0X14 ,ZERO
VECTOR 0x15 ,ZERO
VECTOR 0X16 ,ZERO
VECTOR 0X17 ,ZERO
VECTOR 0X18 ,ZERO
VECTOR 0X19 ,ZERO
VECTOR 0X1A ,ZERO
VECTOR 0X1B ,ZERO
VECTOR 0X1C ,ZERO
VECTOR 0X1D ,ZERO
VECTOR 0X1E ,ERROR_CODE ;处理器自动推错误码
VECTOR 0X1F ,ZERO
VECTOR 0X20 ,ZERO
创建中断描述符表IDT,安装中断处理程序
interrupt.h
#ifndef __KERNEL_INTERRUPT_H
#define __KERNEL_INTERRUPT_H
#include "stdint.h"
typedef void* intr_handler;//指一个空指针类型,仅用来表示地址,用来修饰intr_entry_table
void idt_init(void);
#endif
interrupt.c
#include "interrupt.h"
#include "stdint.h"
#include "global.h"
#include "io.h"
#include "print.h"
#define PIC_M_CTRL 0x20 // 这里用的可编程中断控制器是8259A,主片的控制端口是0x20
#define PIC_M_DATA 0x21 // 主片的数据端口是0x21
#define PIC_S_CTRL 0xa0 // 从片的控制端口是0xa0
#define PIC_S_DATA 0xa1 // 从片的数据端口是0xa1
#define IDT_DESC_CNT 0x21 // 目前总共支持的中断数
/*中断门描述符结构体*/
struct gate_desc {
uint16_t func_offset_low_word;
uint16_t selector;
uint8_t dcount; //此项为双字计数字段,是门描述符中的第4字节。此项固定值,不用考虑
uint8_t attribute;
uint16_t func_offset_high_word;
};
// 静态函数声明,非必须
static void make_idt_desc(struct gate_desc* p_gdesc, uint8_t attr, intr_handler function);
static struct gate_desc idt[IDT_DESC_CNT]; // idt是中断描述符表,本质上就是个中断门描述符数组
char* intr_name[IDT_DESC_CNT]; // 用于保存异常的名字
/******** 定义中断处理程序数组 ********
* 在kernel.S中定义的intrXXentry只是中断处理程序的入口,
* 最终调用的是ide_table中的处理程序*/
intr_handler idt_table[IDT_DESC_CNT];
/********************************************/
extern intr_handler intr_entry_table[IDT_DESC_CNT]; // 声明引用定义在kernel.S中的中断处理函数入口数组
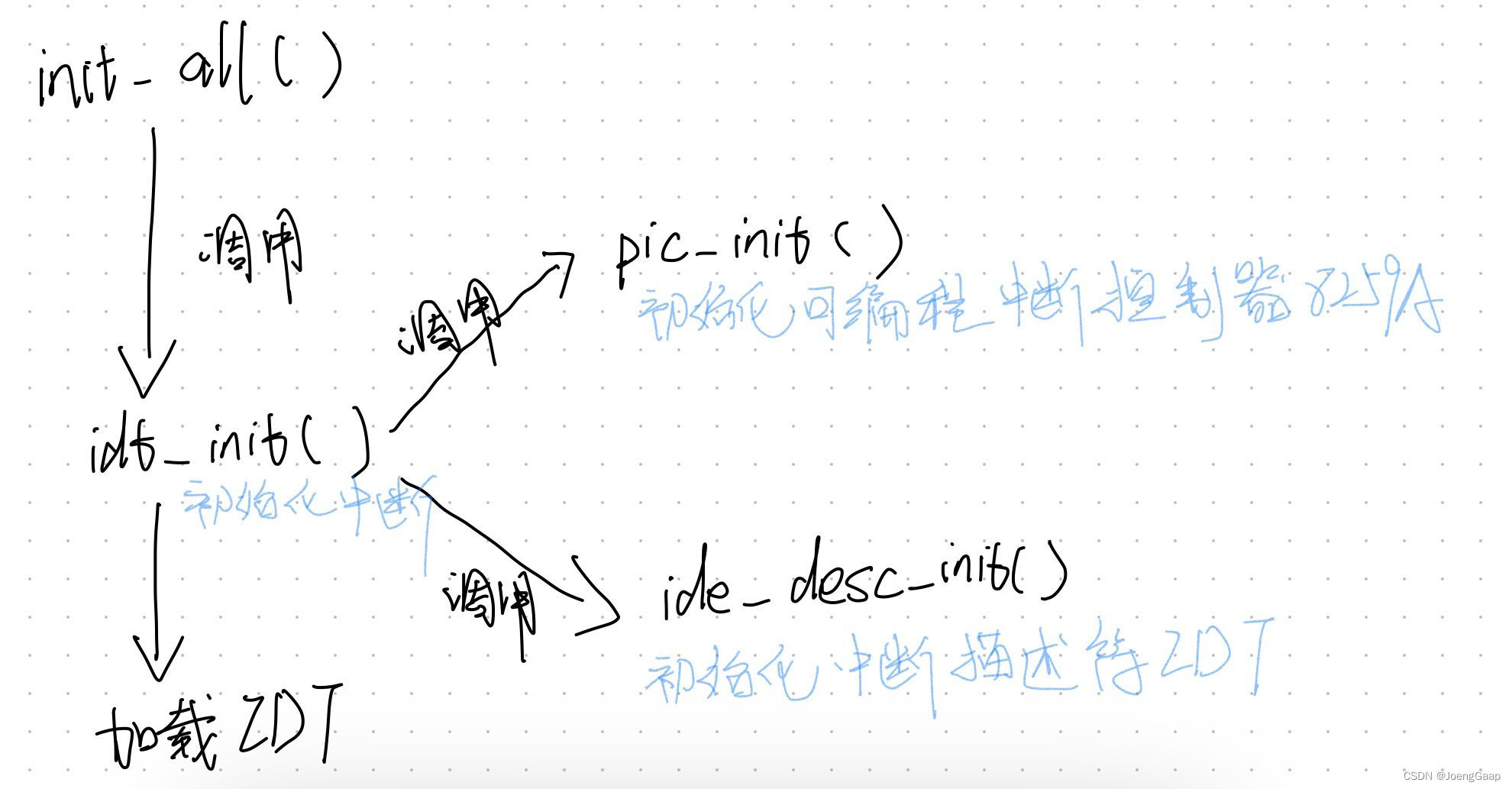
/* 初始化可编程中断控制器8259A */
static void pic_init(void) {
/* 初始化主片 */
outb (PIC_M_CTRL, 0x11); // ICW1: 边沿触发,级联8259, 需要ICW4.
outb (PIC_M_DATA, 0x20); // ICW2: 起始中断向量号为0x20,也就是IR[0-7] 为 0x20 ~ 0x27.
outb (PIC_M_DATA, 0x04); // ICW3: IR2接从片.
outb (PIC_M_DATA, 0x01); // ICW4: 8086模式, 正常EOI
/* 初始化从片 */
outb (PIC_S_CTRL, 0x11); // ICW1: 边沿触发,级联8259, 需要ICW4.
outb (PIC_S_DATA, 0x28); // ICW2: 起始中断向量号为0x28,也就是IR[8-15] 为 0x28 ~ 0x2F.
outb (PIC_S_DATA, 0x02); // ICW3: 设置从片连接到主片的IR2引脚
outb (PIC_S_DATA, 0x01); // ICW4: 8086模式, 正常EOI
outb (PIC_M_DATA, 0xfe);
outb (PIC_S_DATA, 0xff);
put_str(" pic_init done\n");
}
/* 创建中断门描述符 */中断门描述符指针,中断描述符内的属性,中断描述符内对应的中断处理函数(intr_entry_table)
static void make_idt_desc(struct gate_desc* p_gdesc, uint8_t attr, intr_handler function) {
p_gdesc->func_offset_low_word = (uint32_t)function & 0x0000FFFF;//intr_entry_table kernal.S,中断描述符地址
p_gdesc->selector = SELECTOR_K_CODE;//SELECTOR_K_CODE global.h,选择子
p_gdesc->dcount = 0;
p_gdesc->attribute = attr;//IDT_DESC_ATTR_DPL0 global.h ,描述符属性
p_gdesc->func_offset_high_word = ((uint32_t)function & 0xFFFF0000) >> 16;
}
/*初始化中断描述符表*/
static void idt_desc_init(void) {
int i, lastindex = IDT_DESC_CNT - 1;
for (i = 0; i < IDT_DESC_CNT; i++) {
make_idt_desc(&idt[i], IDT_DESC_ATTR_DPL0, intr_entry_table[i]);
}
/* 单独处理系统调用,系统调用对应的中断门dpl为3,
* 中断处理程序为单独的syscall_handler */
put_str(" idt_desc_init done\n");
}
/* 通用的中断处理函数,一般用在异常出现时的处理 */
static void general_intr_handler(uint8_t vec_nr) {
if (vec_nr == 0x27 || vec_nr == 0x2f) { // 0x2f是从片8259A上的最后一个irq引脚,保留
return; //IRQ7和IRQ15会产生伪中断(spurious interrupt),无须处理。
}
put_str("int vector : 0x");
put_int(vec_nr);
put_char('\n');
}
/* 完成一般中断处理函数注册及异常名称注册 */
static void exception_init(void) { // 完成一般中断处理函数注册及异常名称注册
int i;
for (i = 0; i < IDT_DESC_CNT; i++) {
/* idt_table数组中的函数是在进入中断后根据中断向量号调用的,
* 见kernel/kernel.S的call [idt_table + %1*4] */
idt_table[i] = general_intr_handler; // 默认为general_intr_handler。
// 以后会由register_handler来注册具体处理函数。
intr_name[i] = "unknown"; // 先统一赋值为unknown
}
intr_name[0] = "#DE Divide Error";
intr_name[1] = "#DB Debug Exception";
intr_name[2] = "NMI Interrupt";
intr_name[3] = "#BP Breakpoint Exception";
intr_name[4] = "#OF Overflow Exception";
intr_name[5] = "#BR BOUND Range Exceeded Exception";
intr_name[6] = "#UD Invalid Opcode Exception";
intr_name[7] = "#NM Device Not Available Exception";
intr_name[8] = "#DF Double Fault Exception";
intr_name[9] = "Coprocessor Segment Overrun";
intr_name[10] = "#TS Invalid TSS Exception";
intr_name[11] = "#NP Segment Not Present";
intr_name[12] = "#SS Stack Fault Exception";
intr_name[13] = "#GP General Protection Exception";
intr_name[14] = "#PF Page-Fault Exception";
// intr_name[15] 第15项是intel保留项,未使用
intr_name[16] = "#MF x87 FPU Floating-Point Error";
intr_name[17] = "#AC Alignment Check Exception";
intr_name[18] = "#MC Machine-Check Exception";
intr_name[19] = "#XF SIMD Floating-Point Exception";
/*完成有关中断的所有初始化工作*/
void idt_init() {
put_str("idt_init start\n");
idt_desc_init(); // 初始化中断描述符表
pic_init(); // 初始化8259A
/* 加载idt */
uint64_t idt_operand = ((sizeof(idt) - 1) | ((uint64_t)(uint32_t)idt << 16));
asm volatile("lidt %0" : : "m" (idt_operand));
put_str("idt_init done\n");
}
global.h
#ifndef __KERNEL_GLOBAL_H
#define __KERNEL_GLOBAL_H
#include "stdint.h"
#define RPL0 0
#define RPL1 1
#define RPL2 2
#define RPL3 3
#define TI_GDT 0
#define TI_LDT 1
#define SELECTOR_K_CODE ((1 << 3) + (TI_GDT << 2) + RPL0)
#define SELECTOR_K_DATA ((2 << 3) + (TI_GDT << 2) + RPL0)
#define SELECTOR_K_STACK SELECTOR_K_DATA
#define SELECTOR_K_GS ((3 << 3) + (TI_GDT << 2) + RPL0)
//-------------- IDT描述符属性 ------------
#define IDT_DESC_P 1
#define IDT_DESC_DPL0 0
#define IDT_DESC_DPL3 3
#define IDT_DESC_32_TYPE 0xE // 32位的门
#define IDT_DESC_16_TYPE 0x6 // 16位的门,不用,定义它只为和32位门区分
#define IDT_DESC_ATTR_DPL0 ((IDT_DESC_P << 7) + (IDT_DESC_DPL0 << 5) + IDT_DESC_32_TYPE)
#define IDT_DESC_ATTR_DPL3 ((IDT_DESC_P << 7) + (IDT_DESC_DPL3 << 5) + IDT_DESC_32_TYPE)
#endif
用内联汇编实现I/O函数
io.h
/************** 机器模式 ***************
b -- 输出寄存器QImode名称,即寄存器中的最低8位:[a-d]l。
w -- 输出寄存器HImode名称,即寄存器中2个字节的部分,如[a-d]x。
HImode
“Half-Integer”模式,表示一个两字节的整数。
QImode
“Quarter-Integer”模式,表示一个一字节的整数。
*******************************************/
#ifndef __LIB_IO_H
#define __LIB_IO_H
#include "stdint.h"
/* 向端口port写入一个字节*/
static inline void outb(uint16_t port, uint8_t data) {
/*********************************************************
a表示用寄存器al或ax或eax,对端口指定N表示0~255, d表示用dx存储端口号,
%b0表示对应al,%w1表示对应dx */
asm volatile ( "outb %b0, %w1" : : "a" (data), "Nd" (port));
/******************************************************/
}
/* 将addr处起始的word_cnt个字写入端口port */
static inline void outsw(uint16_t port, const void* addr, uint32_t word_cnt) {
/*********************************************************
+表示此限制即做输入又做输出.
outsw是把ds:esi处的16位的内容写入port端口, 我们在设置段描述符时,
已经将ds,es,ss段的选择子都设置为相同的值了,此时不用担心数据错乱。*/
asm volatile ("cld; rep outsw" : "+S" (addr), "+c" (word_cnt) : "d" (port));
/******************************************************/
}
/* 将从端口port读入的一个字节返回 */
static inline uint8_t inb(uint16_t port) {
uint8_t data;
asm volatile ("inb %w1, %b0" : "=a" (data) : "Nd" (port));
return data;
}
/* 将从端口port读入的word_cnt个字写入addr */
static inline void insw(uint16_t port, void* addr, uint32_t word_cnt) {
/******************************************************
insw是将从端口port处读入的16位内容写入es:edi指向的内存,
我们在设置段描述符时, 已经将ds,es,ss段的选择子都设置为相同的值了,
此时不用担心数据错乱。*/
asm volatile ("cld; rep insw" : "+D" (addr), "+c" (word_cnt) : "d" (port) : "memory");
/******************************************************/
}
#endif
设置8259A
在interrupt.c
加载IDT,开启中断
在interrupt.c
启动
init.c
#include "init.h"
#include "print.h"
#include "interrupt.h"
#include "../device/timer.h"
/*负责初始化所有模块 */
void init_all() {
put_str("init_all\n");
idt_init(); // 初始化中断
timer_init();
}
init.h
#ifndef __KERNEL_INIT_H
#define __KERNEL_INIT_H
void init_all(void);
#endif
main.c
#include "print.h"
#include "init.h"
int main(void) {
put_str("I am kernel\n");
init_all();
asm volatile("sti");
while(1);
}















 4901
4901











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









