






针孔摄像机和透镜
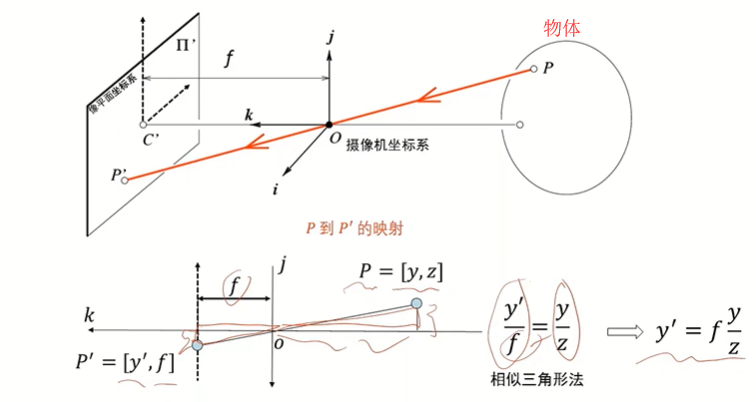
引入透镜之前的相机
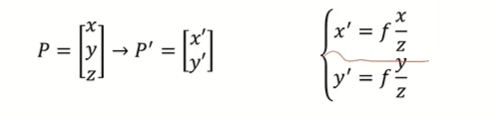
数学模型
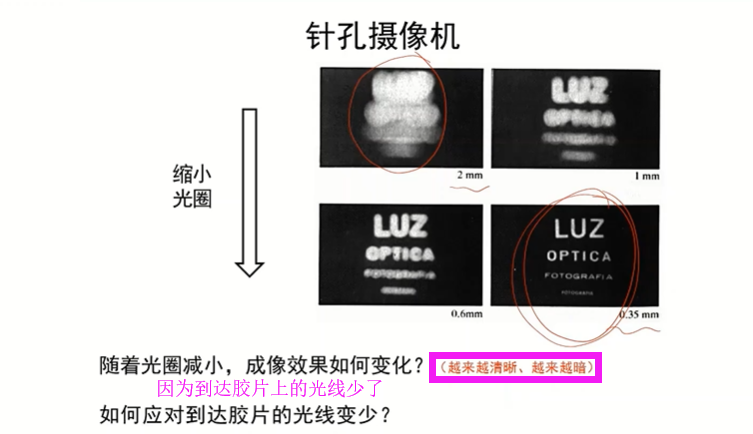
(小孔成像原理中的孔相等于相机里面的光圈概念。)
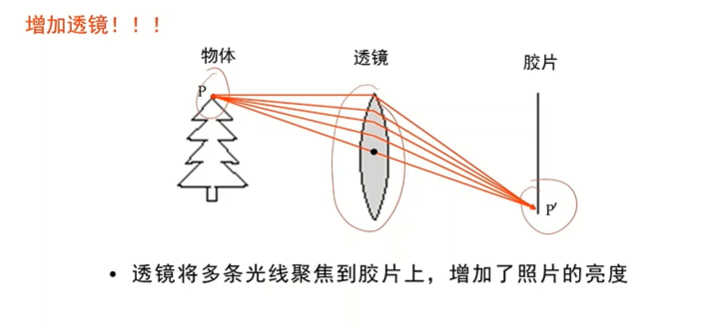
透镜的两个性质
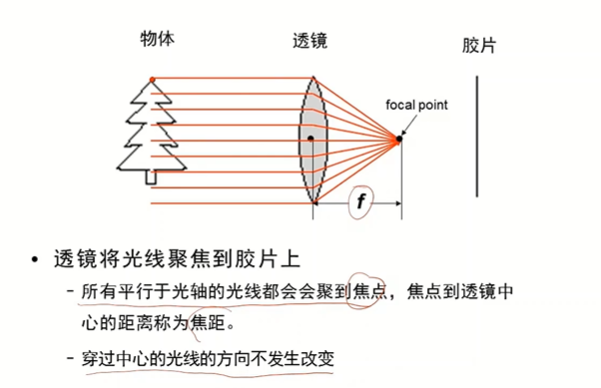
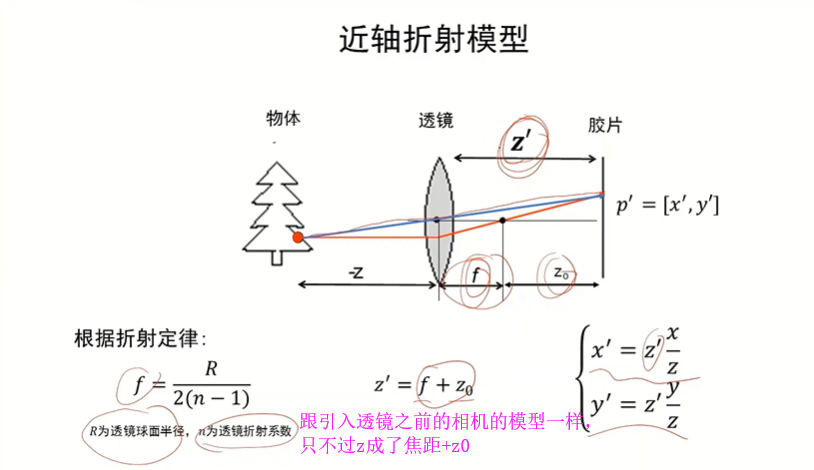
加了透镜之后的相机
数学模型
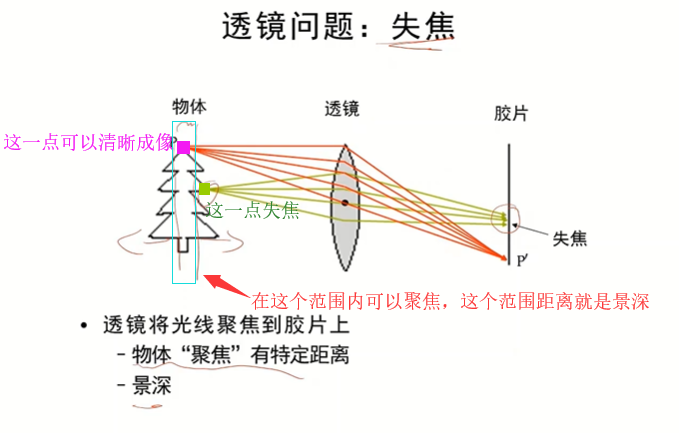
 但是透镜也有问题:
但是透镜也有问题:
艺术效果:

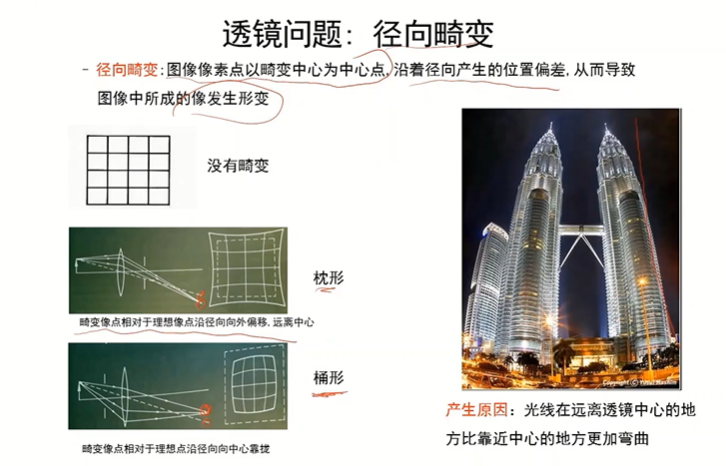
另一个问题:
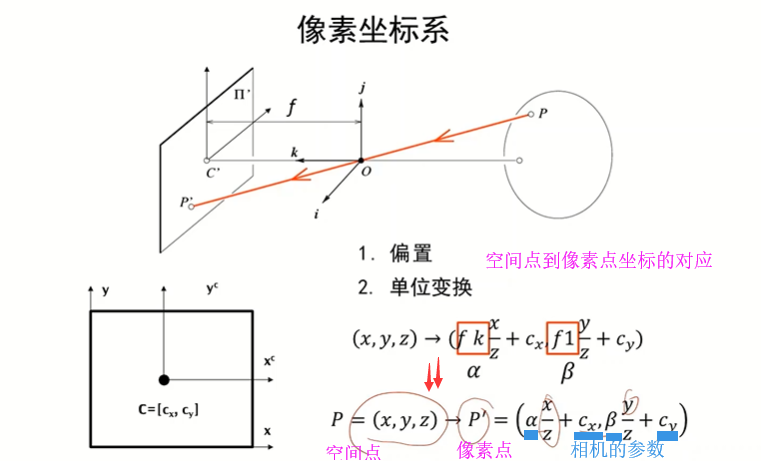
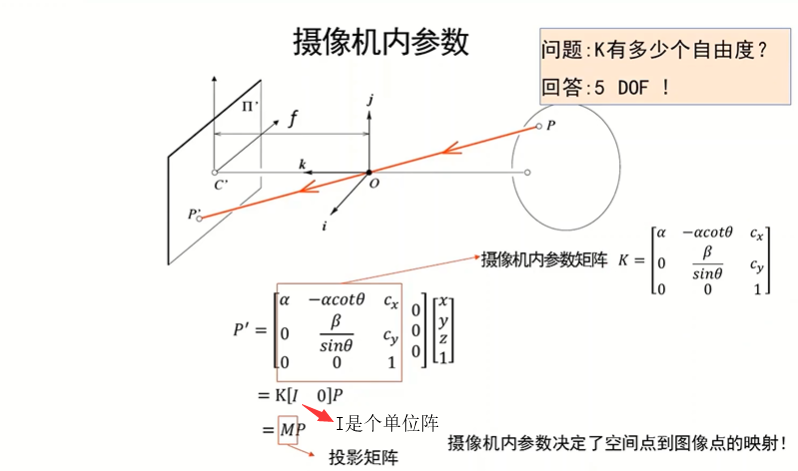
摄像机几何
空间点到图像上的像素点的映射关系:
CSDN:深入解读相机矩阵
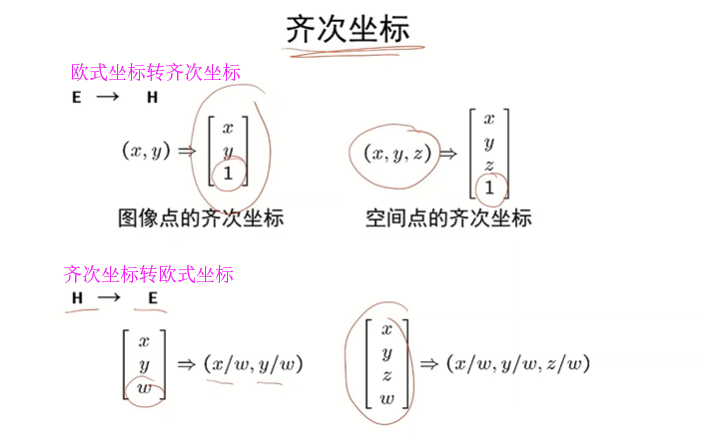
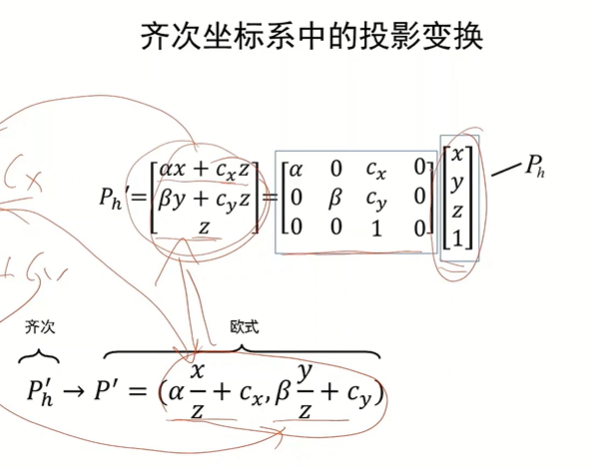
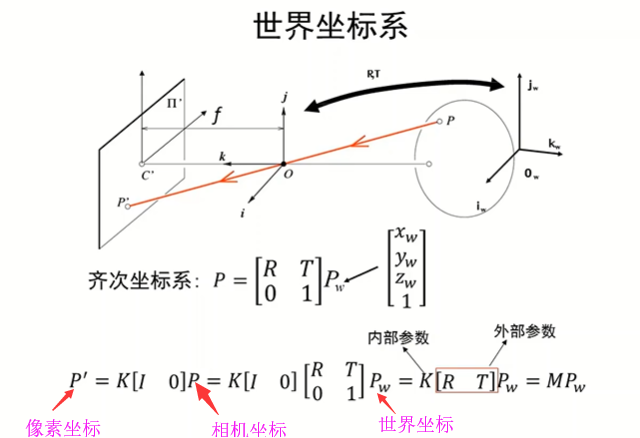
用齐次坐标表示
(跟GAMES101连起来了)
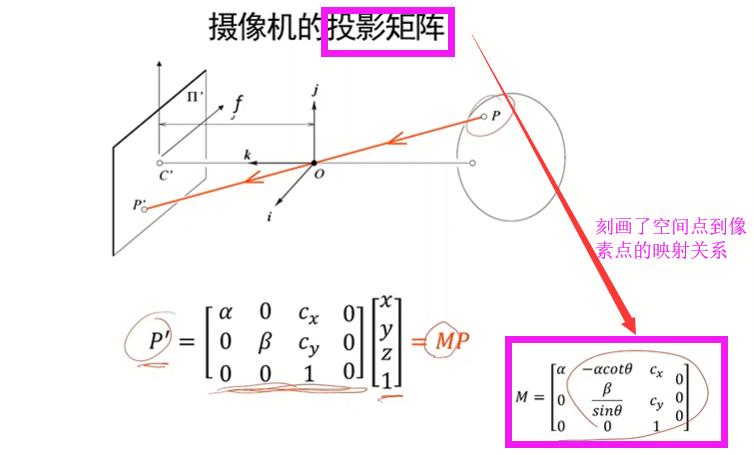 投影矩阵中的theta其实是考虑了像素坐标系不垂直的情况,当垂直时,cottheta=0,sintheta=1
投影矩阵中的theta其实是考虑了像素坐标系不垂直的情况,当垂直时,cottheta=0,sintheta=1
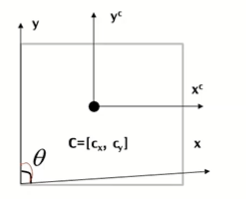
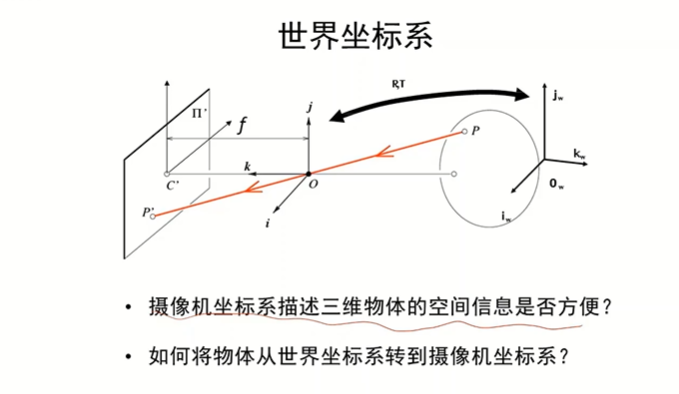
基准的坐标系称为世界坐标系,经过平移旋转对应到相机坐标系,不同的相机坐标系看相同物体产生的视觉效果不同
外部参数世界坐标系的点和图像上的点的对应关系















 788
788











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









