







前言:总纲请看《计算机视觉学习路》
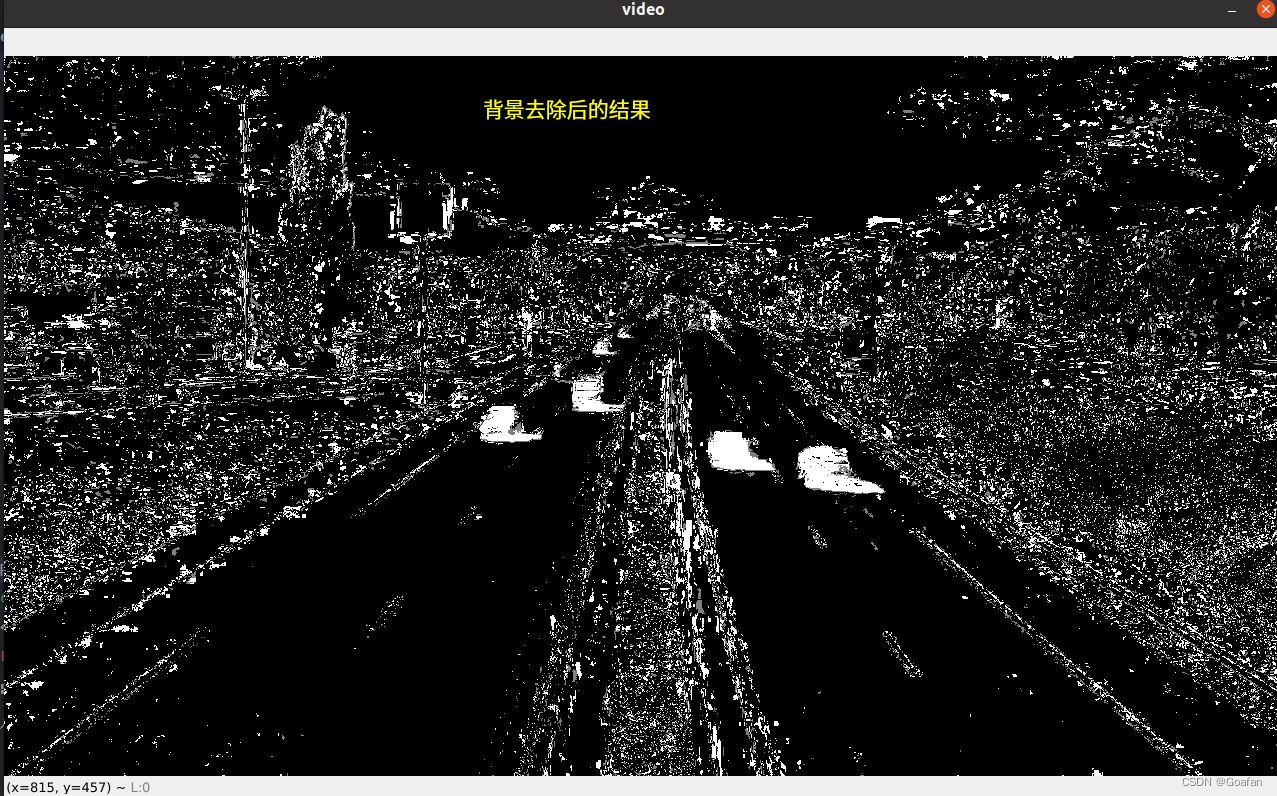
1.去除背景
createBackgroundSubtractorMOG2( ... )
history = 200 # 代表预存多少视频帧,根据这些帧里面静止的东西判断背景

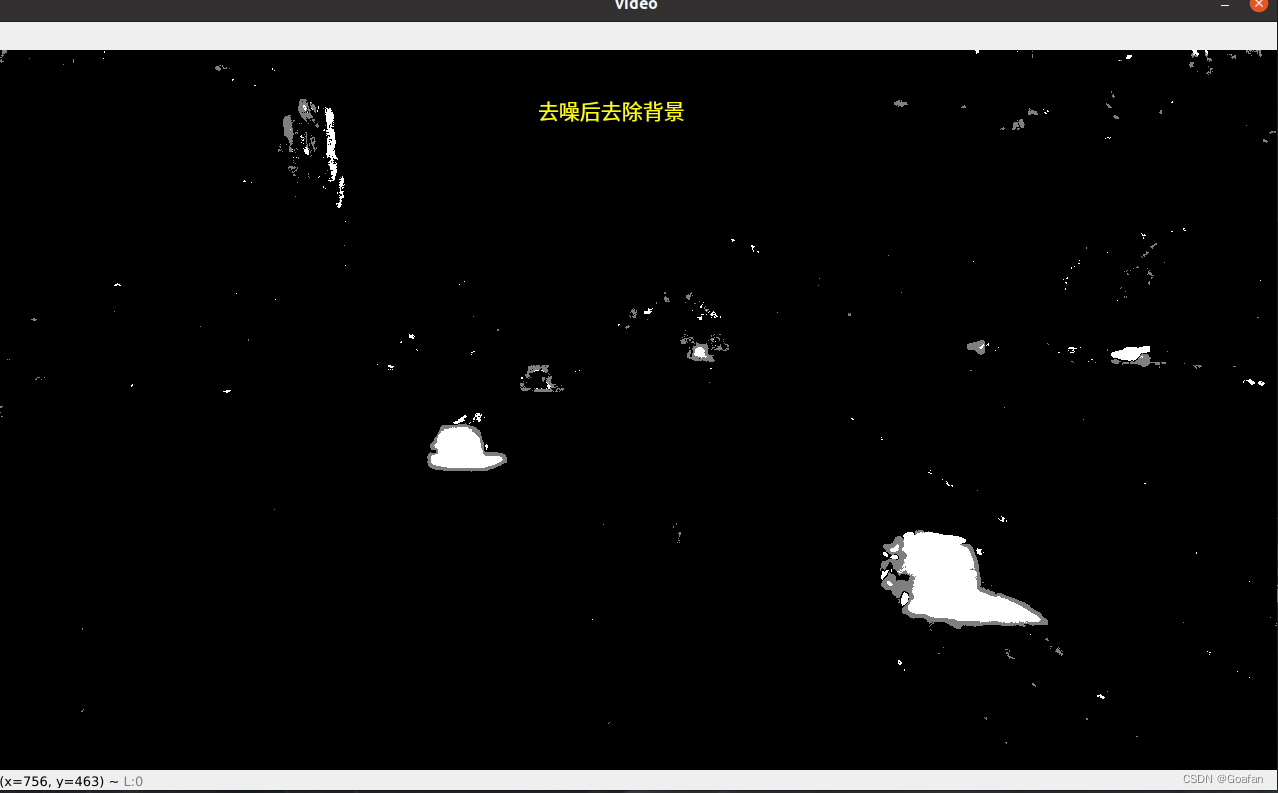
可以看到树叶形成了很多噪点,所以需要在去除背景前先去噪,下面是去噪后的视频
2.形态处理
去除背景后通过腐蚀去掉小的噪点
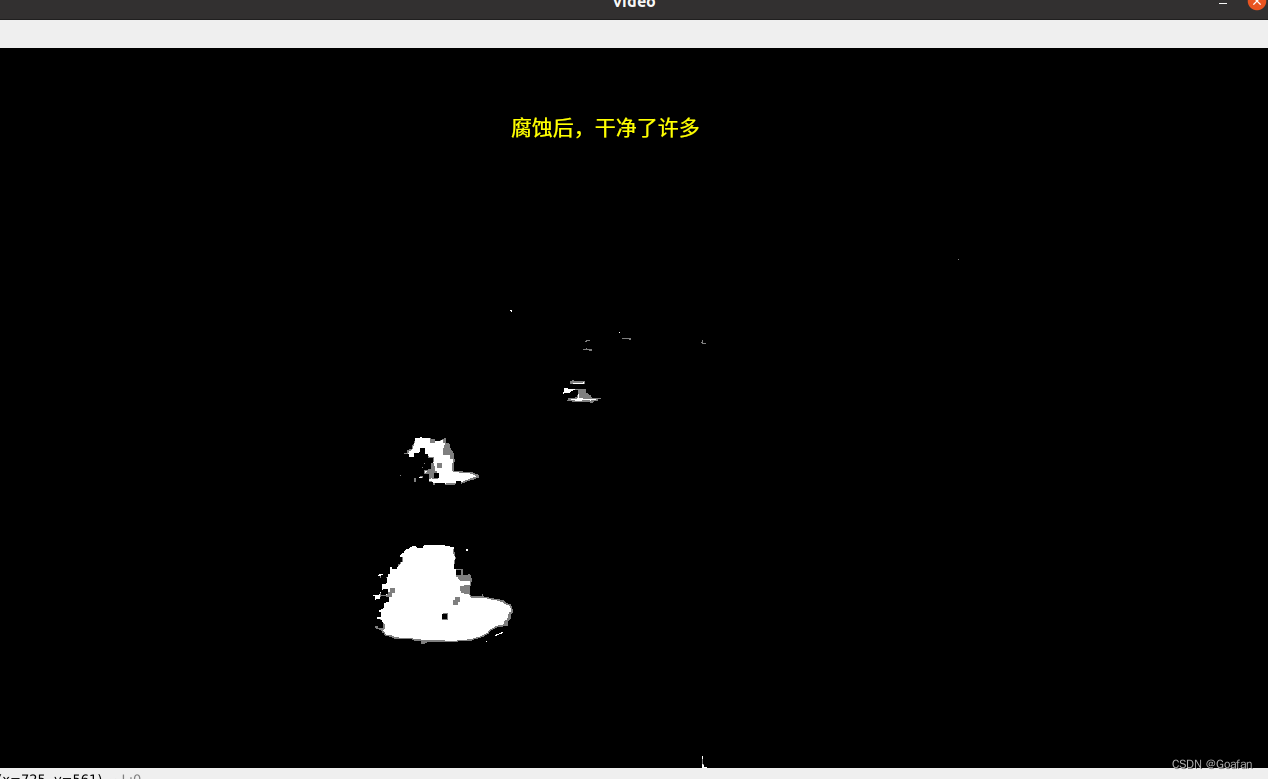
腐蚀膨胀后发现有很多残缺的地方:

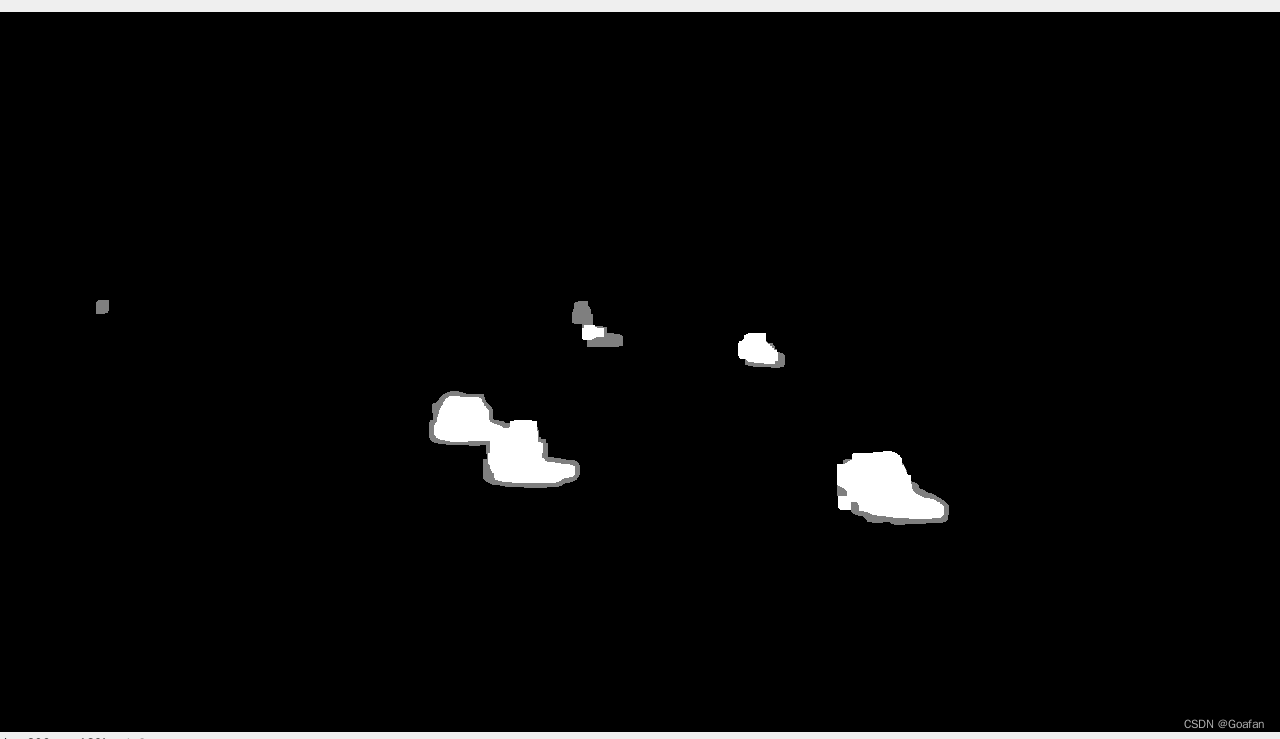
所以还要进行一次闭运算:如果加了闭运算还有物体内部还有斑块,可以再进行一次闭运算
3.查找轮廓
根据上面处理完的视频,可以找到一些(车和噪点的)轮廓 ,并且在原视频绘制出来,可以看到还是有一些其他的轮廓会显示出来
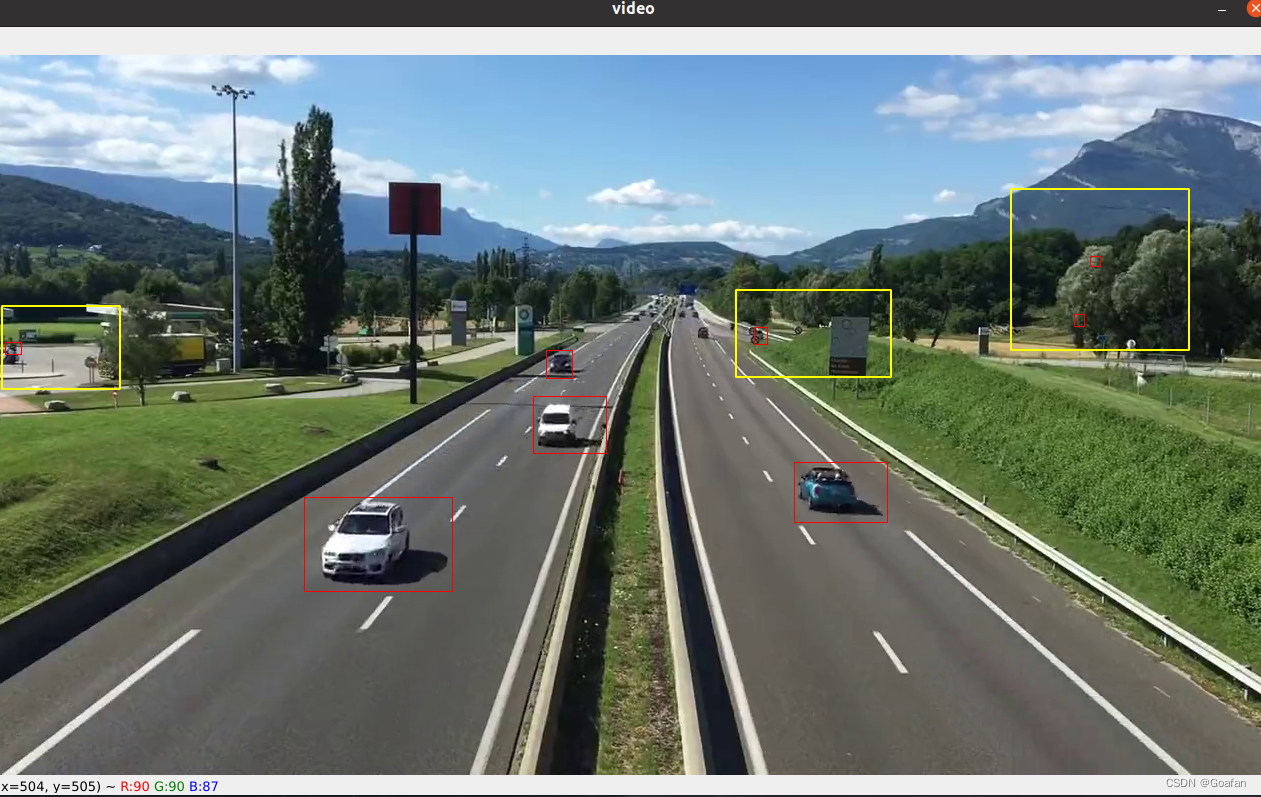
观察到车辆经过摄像头下方时,边框会变大,所以根据边框宽高,设置一个阈值,小于阈值的不显示。
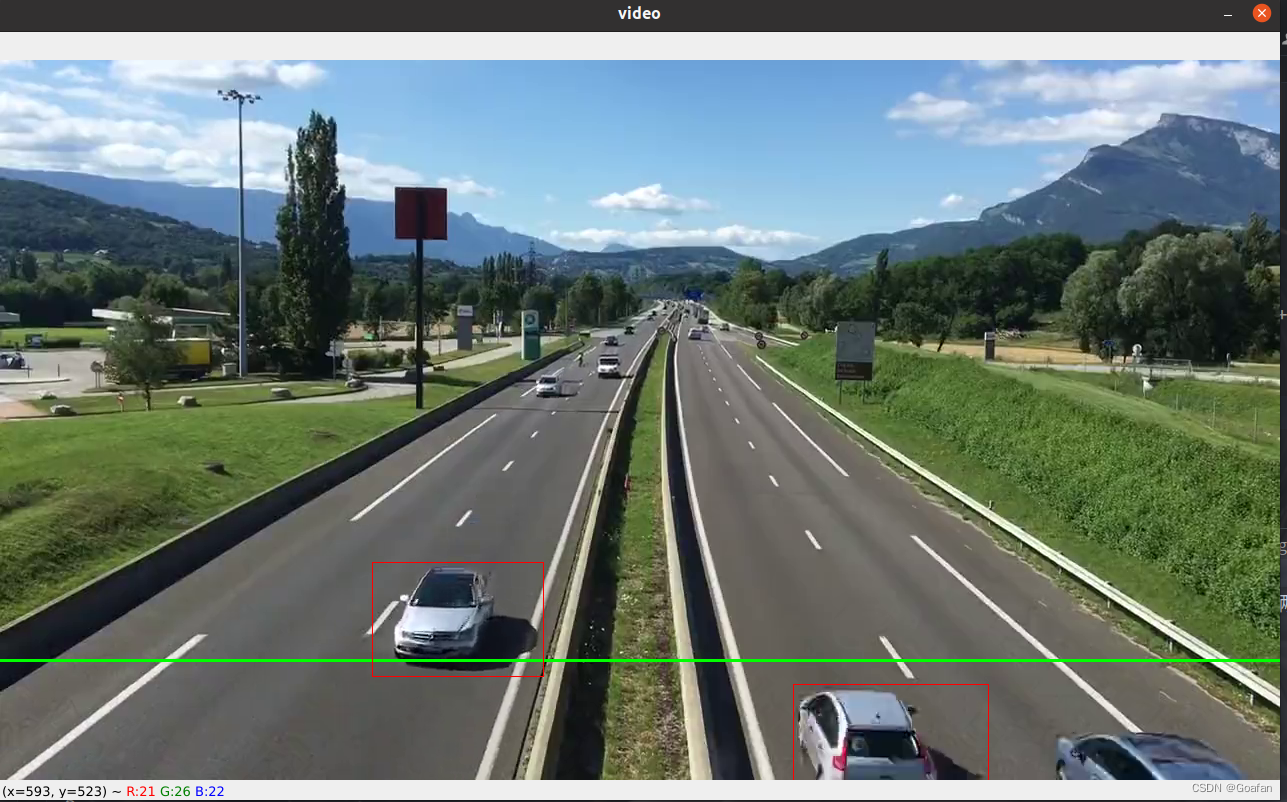
获取到边框之后,用边框的中心点表示车辆,并且存入一个数组中,在视频底部画一条线,当车辆的中心点经过该线时,表示有车辆经过。
天空云动的时候轮廓也比较大,但是该轮廓一般静止,中心点不可能经过下面那条线!!!
4.车辆统计
查找到有效车辆后,需要将统计的个数显示在屏幕上,整体效果如下:

总结:传统目标检测的缺点:
- 当车辆靠的较近时,容易漏检
- 当车辆行驶较慢时,容易重复计数
更准确的统计信息需要使用深度学习,后面进行介绍。
总的代码如下:
import cv2
import numpy as np
# 加载视频
cap = cv2.VideoCapture('../img/video.mp4')
# 背景去除
bgsubmog = cv2.createBackgroundSubtractorMOG2()
# 创建腐蚀膨胀的卷积核
k = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5))
# 设置最小宽高阈值
min_w, min_h = 90, 90
# 创建一个列表存放车辆轮廓中心点
cars = []
car_n = 0 # 车辆的个数
# 检测线的高 视频的尺寸为1280*720
line_height = 550
# 线的偏移
line_offset = 6
# 定义函数,计算中心点
def center(x, y, w, h):
x1 = int(w / 2)
y1 = int(h / 2)
cx = x + x1
cy = y + y1
return cx, cy
while True:
ret, frame = cap.read()
if ret:
# 灰度化
cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 由于一些树叶也会动,形成噪点,所以进行去噪
blur = cv2.GaussianBlur(frame, (9, 9), 5) # 9*9可以自己设置 3*3 5*5 7*7.。。
mask = bgsubmog.apply(blur) # 去除背景
# 腐蚀
erode = cv2.erode(mask, k)
# 腐蚀之后变小了,要膨胀
dilate = cv2.dilate(erode, k, iterations=2)
# 闭操作,去掉物体内部的小块
close = cv2.morphologyEx(dilate, cv2.MORPH_CLOSE, k)
close = cv2.morphologyEx(close, cv2.MORPH_CLOSE, k)
# 查找轮廓
contours, h = cv2.findContours(close, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 每一帧都要画线
cv2.line(frame, (0, line_height), (1280, line_height), (0, 255, 0), 2)
for (i, c) in enumerate(contours): # 拿到索引和边界
(x, y, w, h) = cv2.boundingRect(c) # 绘制矩形
if w >= min_w and h >= min_h: # 如果是车辆,绘制轮廓
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 0, 255))
# 存取车的轮廓的中心点,如果中心点过线,代表有车经过
cpoint = center(x, y, w, h) # 计算中心点
cars.append(cpoint)
for (x, y) in cars:
# 如果车在线的上下偏移量之间,表示有车辆经过
if (y > line_height - line_offset) and (y < line_height + line_offset):
car_n += 1 # 车的数量+1
cars.remove((x, y))
print(car_n)
else: # 如果不是车辆,跳过
continue
# 显示车辆的统计信息
cv2.putText(frame, 'Cars Count:' + str(car_n), (500, 60), cv2.FONT_HERSHEY_SIMPLEX, 2, (255, 0, 0), 5)
cv2.imshow('video', frame)
key = cv2.waitKey(33)
if key == 113: # 按‘q'退出
break
cap.release()
cv2.destroyAllWindows()

















 6552
6552











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











