










一:实验原理
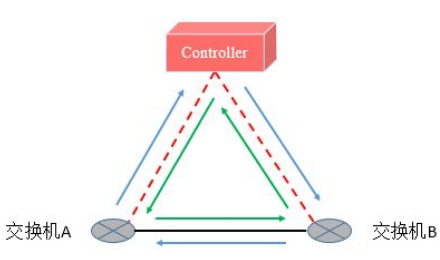
网络时延探测应用利用了Ryu自带的Switches模块的数据,获取到了LLDP数据发送时的时间戳,然后和收到的时间戳进行相减,得到了LLDP数据包从控制器下发到交换机A,然后从交换机A到交换机B,再上报给控制器的时延T1,示例见图1的蓝色箭头。同理反向的时延T2由绿色的箭头组成。
此外,控制器到交换机的往返时延由一个蓝色箭头和一个绿色箭头组成,此部分时延由echo报文测试,分别为Ta,Tb。最后链路的前向后向平均时延T=(T1+T2-Ta-Tb)/2。
二:时延探测代码实现
(一)拓扑发现模块
from ryu.base import app_manager
from ryu.ofproto import ofproto_v1_3
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER,CONFIG_DISPATCHER,DEAD_DISPATCHER #只是表示datapath数据路径的状态
from ryu.controller.handler import set_ev_cls
from ryu.lib import hub
from ryu.lib.packet import packet,ethernet
from ryu.topology import event,switches
from ryu.topology.api import get_switch,get_link,get_host
import threading,time,random
DELAY_MONITOR_PERIOD = 5
class TopoDetect(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_3.OFP_VERSION]
def __init__(self,*args,**kwargs):
super(TopoDetect,self).__init__(*args,**kwargs)
self.topology_api_app = self
self.name = "topology"
self.link_list = None
self.switch_list = None
self.host_list = None
self.dpid2id = {}
self.id2dpid = {}
self.dpid2switch = {}
self.ip2host = {}
self.ip2switch = {}
self.net_size = 0
self.net_topo = []
self.net_flag = False
self.net_arrived = 0
self.monitor_thread = hub.spawn(self._monitor)
def _monitor(self): #修改,只获取拓扑,不主动显示!!!
"""
协程实现伪并发,探测拓扑状态
"""
while True:
#print("------------------_monitor")
self._host_add_handler(None) #主机单独提取处理
self.get_topology(None)
hub.sleep(DELAY_MONITOR_PERIOD) #5秒一次
@set_ev_cls(ofp_event.EventOFPSwitchFeatures,CONFIG_DISPATCHER)
def switch_feature_handle(self,ev):
"""
datapath中有配置消息到达
"""
#print("------XXXXXXXXXXX------%d------XXXXXXXXXXX------------switch_feature_handle"%self.net_arrived)
#print("----%s----------",ev.msg)
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
ofp_parser = datapath.ofproto_parser
match = ofp_parser.OFPMatch()
actions = [ofp_parser.OFPActionOutput(ofproto.OFPP_CONTROLLER,ofproto.OFPCML_NO_BUFFER)]
self.add_flow(datapath=datapath,priority=0,match=match,actions=actions,extra_info="config infomation arrived!!")
def add_flow(self,datapath,priority,match,actions,idle_timeout=0,hard_timeout=0,extra_info=None):
#print("------------------add_flow:")
if extra_info != None:
print(extra_info)
ofproto = datapath.ofproto
ofp_parser = datapath.ofproto_parser
inst = [ofp_parser.OFPInstructionActions(ofproto.OFPIT_APPLY_ACTIONS,actions)]
mod = ofp_parser.OFPFlowMod(datapath=datapath,priority=priority,
idle_timeout=idle_timeout,
hard_timeout=hard_timeout,
match=match,instructions=inst)
datapath.send_msg(mod);
@set_ev_cls(ofp_event.EventOFPPacketIn,MAIN_DISPATCHER)
def packet_in_handler(self,ev):
#print("------------------packet_in_handler")
msg = ev.msg
datapath = msg.datapath
ofproto = datapath.ofproto
ofp_parser = datapath.ofproto_parser
dpid = datapath.id
in_port = msg.match['in_port']
pkt = packet.Packet(msg.data)
eth_pkt = pkt.get_protocol(ethernet.ethernet)
dst = eth_pkt.dst
src = eth_pkt.src
#self.logger.info("------------------Controller %s get packet, Mac address from: %s send to: %s , send from datapath: %s,in port is: %s"
# ,dpid,src,dst,dpid,in_port)
self.get_topology(None)
@set_ev_cls([event.EventHostAdd])
def _host_add_handler(self,ev): #主机信息单独处理,不属于网络拓扑
self.host_list = get_host(self.topology_api_app) #3.需要使用pingall,主机通过与边缘交换机连接,才能告诉控制器
#获取主机信息字典ip2host{ipv4:host object} ip2switch{ipv4:dpid}
for i,host in enumerate(self.host_list):
self.ip2switch["%s"%host.ipv4] = host.port.dpid
self.ip2host["%s"%host.ipv4] = host
events = [event.EventSwitchEnter, event.EventSwitchLeave,
event.EventSwitchReconnected,
event.EventPortAdd, event.EventPortDelete,
event.EventPortModify,
event.EventLinkAdd, event.EventLinkDelete]
@set_ev_cls(events)
def get_topology(self,ev):
#print("------+++++++++++------%d------+++++++++++------------get_topology"%self.net_arrived)
self.net_flag = False
self.net_topo = []
#print("-----------------get_topology")
#获取所有的交换机、链路
self.switch_list = get_switch(self.topology_api_app) #1.只要交换机与控制器联通,就可以获取
self.link_list = get_link(self.topology_api_app) #2.在ryu启动时,加上--observe-links即可用于拓扑发现
#获取交换机字典id2dpid{id:dpid} dpid2switch{dpid:switch object}
for i,switch in enumerate(self.switch_list):
self.id2dpid[i] = switch.dp.id
self.dpid2id[switch.dp.id] = i
self.dpid2switch[switch.dp.id] = switch
#根据链路信息,开始获取拓扑信息
self.net_size = len(self.id2dpid) #表示网络中交换机个数
for i in range(self.net_size):
self.net_topo.append([0]*self.net_size)
for link in self.link_list:
src_dpid = link.src.dpid
src_port = link.src.port_no
dst_dpid = link.dst.dpid
dst_port = link.dst.port_no
try:
sid = self.dpid2id[src_dpid]
did = self.dpid2id[dst_dpid]
except KeyError as e:
#print("--------------Error:get KeyError with link infomation(%s)"%e)
return
self.net_topo[sid][did] = [src_port,0] #注意:这里0表示存在链路,后面可以修改为时延
self.net_topo[did][sid] = [dst_port,0] #注意:修改为列表,不要用元组,元组无法修改,我们后面要修改时延
self.net_flag = True #表示网络拓扑创建成功
def show_topology(self):
print("-----------------show_topology")
print("----------switch network----------")
line_info = " "
for i in range(self.net_size):
line_info+=" s%-5d "%self.id2dpid[i]
print(line_info)
for i in range(self.net_size):
line_info = "s%d "%self.id2dpid[i]
for j in range(self.net_size):
if self.net_topo[i][j] == 0:
line_info+="%-22d"%0
else:
line_info+="(%d,%.12f) "%tuple(self.net_topo[i][j])
print(line_info)
print("----------host 2 switch----------")
for key,val in self.ip2switch.items():
print("%s---s%d"%(key,val))(二)模块导入
from ryu.base import app_manager
from ryu.base.app_manager import lookup_service_brick
from ryu.ofproto import ofproto_v1_3
from ryu.controller import ofp_event
from ryu.controller.handler import MAIN_DISPATCHER,CONFIG_DISPATCHER,DEAD_DISPATCHER,HANDSHAKE_DISPATCHER #只是表示datapath数据路径的状态
from ryu.controller.handler import set_ev_cls
from ryu.lib import hub
from ryu.lib.packet import packet,ethernet
from ryu.topology.switches import Switches
from ryu.topology.switches import LLDPPacket
import time(三)数据结构
ECHO_REQUEST_INTERVAL = 0.05
DELAY_DETECTING_PERIOD = 5
class DelayDetect(app_manager.RyuApp):
OFP_VERSIONS = [ofproto_v1_3.OFP_VERSION]
def __init__(self,*args,**kwargs):
super(DelayDetect,self).__init__(*args,**kwargs)
self.name = "delay"
self.topology = lookup_service_brick("topology") #注意:我们使用lookup_service_brick加载模块实例时,对于我们自己定义的app,我们需要在类中定义self.name。
self.switches = lookup_service_brick("switches") #此外,最重要的是:我们启动本模块DelayDetect时,必须同时启动自定义的模块!!! 比如:ryu-manager ./TopoDetect.py ./DelayDetect.py --verbose --observe-links
self.dpid2switch = {} #或者直接为{},也可以。下面_state_change_handler也会添加进去
self.dpid2echoDelay = {} #记录echo时延
self.src_sport_dst2Delay = {} #记录LLDP报文测量的时延。实际上可以直接更新,这里单独记录,为了单独展示 {”src_dpid-srt_port-dst_dpid“:delay}
self.detector_thread = hub.spawn(self._detector)(四)协程获取链路时延
def _detector(self):
"""
协程实现伪并发,探测链路时延
"""
while True:
if self.topology == None:
self.topology = lookup_service_brick("topology")
if self.topology.net_flag:
#print("------------------_detector------------------")
self._send_echo_request()
self.get_link_delay()
if self.topology.net_flag:
try:
self.show_delay()
self.topology.show_topology() #拓扑显示
except Exception as err:
print("------------------Detect delay failure!!!------------------")
hub.sleep(DELAY_DETECTING_PERIOD) #5秒一次(五)获取Echo时延
def _send_echo_request(self):
"""
发生echo报文到datapath
"""
for datapath in self.dpid2switch.values():
parser = datapath.ofproto_parser
echo_req = parser.OFPEchoRequest(datapath,data=bytes("%.12f"%time.time(),encoding="utf8")) #获取当前时间
datapath.send_msg(echo_req)
#重要!不要同时发送echo请求,因为它几乎同时会生成大量echo回复。
#在echo_reply_处理程序中处理echo reply时,会产生大量队列等待延迟。
hub.sleep(ECHO_REQUEST_INTERVAL)
@set_ev_cls(ofp_event.EventOFPEchoReply,[MAIN_DISPATCHER,CONFIG_DISPATCHER,HANDSHAKE_DISPATCHER])
def echo_reply_handler(self,ev):
"""
处理echo响应报文,获取控制器到交换机的链路往返时延
Controller
|
echo latency |
`|‘
Switch
"""
now_timestamp = time.time()
try:
echo_delay = now_timestamp - eval(ev.msg.data)
self.dpid2echoDelay[ev.msg.datapath.id] = echo_delay
except:
return(六)获取LLDP时延
@set_ev_cls(ofp_event.EventOFPPacketIn,MAIN_DISPATCHER)
def packet_in_handler(self,ev): #处理到达的LLDP报文,从而获得LLDP时延
"""
Controller
| /|\
\|/ |
Switch----->Switch
"""
msg = ev.msg
try:
src_dpid,src_outport = LLDPPacket.lldp_parse(msg.data) #获取两个相邻交换机的源交换机dpid和port_no(与目的交换机相连的端口)
dst_dpid = msg.datapath.id #获取目的交换机(第二个),因为来到控制器的消息是由第二个(目的)交换机上传过来的
dst_inport = msg.match['in_port']
if self.switches is None:
self.switches = lookup_service_brick("switches") #获取交换机模块实例
#获得key(Port类实例)和data(PortData类实例)
for port in self.switches.ports.keys(): #开始获取对应交换机端口的发送时间戳
if src_dpid == port.dpid and src_outport == port.port_no: #匹配key
port_data = self.switches.ports[port] #获取满足key条件的values值PortData实例,内部保存了发送LLDP报文时的timestamp信息
timestamp = port_data.timestamp
if timestamp:
delay = time.time() - timestamp
self._save_delay_data(src=src_dpid,dst=dst_dpid,src_port=src_outport,lldpdealy=delay)
except:
return
def _save_delay_data(self,src,dst,src_port,lldpdealy):
key = "%s-%s-%s"%(src,src_port,dst)
self.src_sport_dst2Delay[key] = lldpdealy(七)根据LLDP和Echo时延,更新网络拓扑图中的权值信息
def get_link_delay(self):
"""
更新图中的权值信息
"""
print("--------------get_link_delay-----------")
for src_sport_dst in self.src_sport_dst2Delay.keys():
src,sport,dst = tuple(map(eval,src_sport_dst.split("-")))
if src in self.dpid2echoDelay.keys() and dst in self.dpid2echoDelay.keys():
sid,did = self.topology.dpid2id[src],self.topology.dpid2id[dst]
if self.topology.net_topo[sid][did] != 0:
if self.topology.net_topo[sid][did][0] == sport:
s_d_delay = self.src_sport_dst2Delay[src_sport_dst]-(self.dpid2echoDelay[src]+self.dpid2echoDelay[dst])/2;
if s_d_delay < 0: #注意:可能出现单向计算时延导致最后小于0,这是不允许的。则不进行更新,使用上一次原始值
continue
self.topology.net_topo[sid][did][1] = self.src_sport_dst2Delay[src_sport_dst]-(self.dpid2echoDelay[src]+self.dpid2echoDelay[dst])/2(八)显示网络拓扑图和Echo、LLDP时延信息
@set_ev_cls(ofp_event.EventOFPStateChange,[MAIN_DISPATCHER, DEAD_DISPATCHER])
def _state_change_handler(self, ev):
datapath = ev.datapath
if ev.state == MAIN_DISPATCHER:
if not datapath.id in self.dpid2switch:
self.logger.debug('Register datapath: %016x', datapath.id)
self.dpid2switch[datapath.id] = datapath
elif ev.state == DEAD_DISPATCHER:
if datapath.id in self.dpid2switch:
self.logger.debug('Unregister datapath: %016x', datapath.id)
del self.dpid2switch[datapath.id]
if self.topology == None:
self.topology = lookup_service_brick("topology")
print("-----------------------_state_change_handler-----------------------")
print(self.topology.show_topology())
print(self.switches)
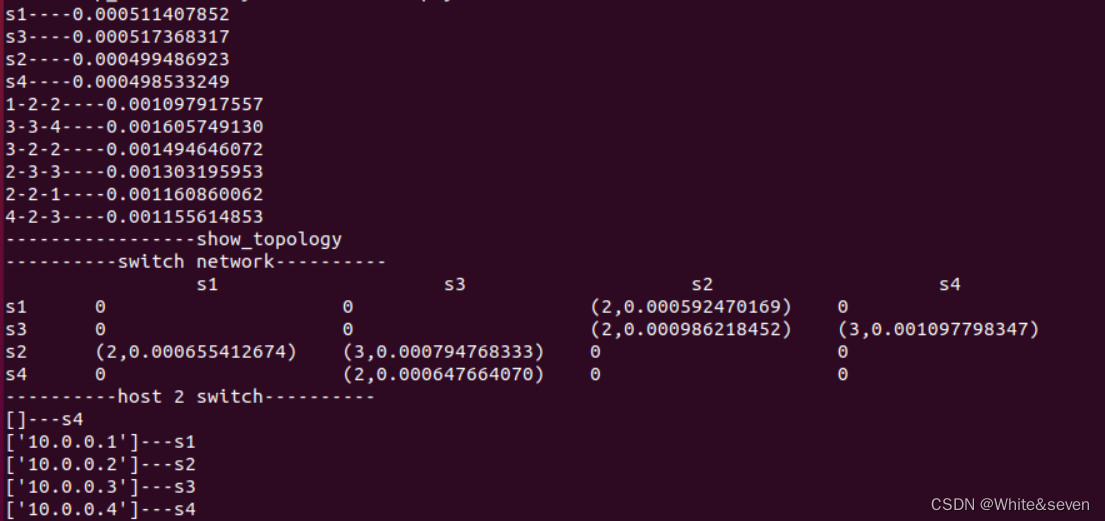
def show_delay(self):
print("-----------------------show echo delay-----------------------")
for key,val in self.dpid2echoDelay.items():
print("s%d----%.12f"%(key,val))
print("-----------------------show LLDP delay-----------------------")
for key,val in self.src_sport_dst2Delay.items():
print("%s----%.12f"%(key,val))三:实验测试
(一)启动Ryu
ryu-manager findtopo.py DelayDetect.py --verbose --observe-links(二)启动mininet
sudo mn --topo=linear,4 --switch=ovsk --controller=remote --link=tc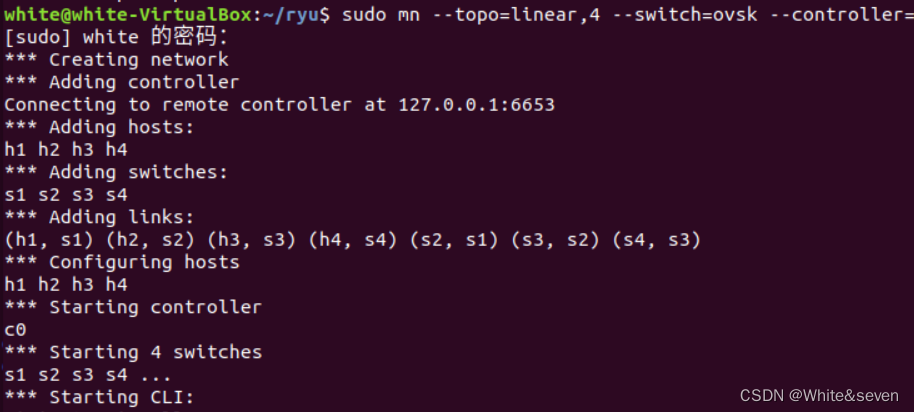
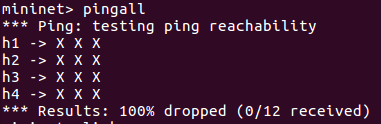
注意:需要在mininet中使用pingall,才能使得交换机获得host存在,从而使得控制器获取host消息。














 4570
4570











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









