







 文章详细介绍了MIPI接口的种类、同步模式以及DSI接口的配置,包括DBI、DPI、DSI接口的特性。同时,讨论了LCM的时钟配置、背光控制、ESD机制和不同平台的差异。此外,还涵盖了HDMI/MHL的使用和TE信号的检测。
文章详细介绍了MIPI接口的种类、同步模式以及DSI接口的配置,包括DBI、DPI、DSI接口的特性。同时,讨论了LCM的时钟配置、背光控制、ESD机制和不同平台的差异。此外,还涵盖了HDMI/MHL的使用和TE信号的检测。
一、Display
1.lcm 相关概念
1.1) MIPI接口
一共有三种接口:DBI(也做CPU或MCU接口)、DPI(也叫RGB接口)、DSI.在使用DSI接口时,目前75/77都只支持到2条data lane,加上一条clock lane.使用DPI接口时,根据LCM IC支持的情况,可以选择16bus、18bus传输RGB格式文件,在GPIO部分分为R、G、B分别对应 8个GPIO(GPIO20~46期间),客户采用DPI接口需要根据选择的bus方式进行配置,推荐RGB端口全部配置为对应的复选模 式,并设置为OUT输出。
采用DBI接口,有两种模式选择,一种是选择共用DPI的bus脚 +DPI控制线,另一种是共用nand data pin+CPU 控制线。
1.2) DSI接口有两种sync 模式
video mode和command mode,其中video mode是BB端一直刷数据到LCM,cmd mode是在有数 据更新时刷数据到LCM GRAM中)和DSI command mode相比,video mode 是需要实时传输image data到lcm端,DSI 的refresh rate决定了lcm的refresh rate。
1.3)EDS机制
92平台LCM driver中定义了esd_check和esd_recovery的接口,但ESD线程不工作。
目前在MT6589之前平台,video mode的ESD实现有三种模式,分别是:ext TE(外部TE信号检测)、int TE(内部TE信号检 测)、non cout clk
不同ESD方式需要注意的方面
a) int TE和ext TE的检测,都不需要实现lcm_esd_check函数,而需要实现lcm_esd_recover函数。non cont clk则不需要实现lcm_esd_check函数和lcm_esd_recover函数,而只需要在上面 params中配置为TRUE即可
b) ext TE的实现,需要LCM外接TE pin到BB端,同时在inital code中配置寄存器打开TE信号的输出 (一般是写0x35寄存器,具体需要和LCM IC FAE确认)
1.4)HDMI/MHL
目前我司HDMI/MHL的相关code和driver都是有集成在codebase中的,要使用的话,只需要只需要在对应的ProjectConfig.mk文件中开启,并且在dct中配置好对应的引脚定义即可。
以下以MHL为例:
ProjectConfig中配置:
MTK_HDMI_SUPPORT=yes #表明开启HDMI/MHL功能
CUSTOM_KERNEL_HDMI=Sii8338 #表明配置为MHL的IC型号
1.5)TE 信号
大部分TE问题是由于没有正常开启TE所导致,首先检查TE是否开启。89平台使用内部TE,lcm driver中只需要在init过程中打开LCM TE即可,一般是写0x35寄存器,部分IC需要额外写其他 寄存器,可与FAE确认。
检查TE是否正常开启,如果是工版,则可使用如下方式打开fps的log,查看TE信息:
adb shell
cd sys/kernel/debug
echo fps:on>mtkfb
然后查看mtklog, 搜索“FPS”,若看到等待TE时间为0, 表示TE未正常开启,需要与LCM IC的FAE进一步确认开启流程 。
若TE已经成功开启,依然有Teering现象,可从如下方面思考分析。
1)是否使用了竖屏横用,导致对GRAM的读写方向不一致,一般会出现斜线切屏现象。
2)是否clock速度过低,FPS低于LCM自刷新率的1/2?
3)是否clock速率过快,超过LCM的自刷新率,导致写GRAM时可能从后面赶上读,导致Teering发生。
1.6)HS/LP
HS:high speed , clock切为HS模式,高速模式。
LP:low power,低电平
有些LCM在开机的时候,如果使用LP下发init code,可能会不准确或者导致花屏等问题,这时候需要使用HS mode发送init code,比如三星的某款OLED(D53D6EA8061V-Amoled)。
continuous clock/no-continuous clock模式
1.7)dithering
抖动显示技术:
MT6572 如所用lcm不支持RGB888 color format, 显示效果差需要开启dithering的。
1.8)其他概念:
AAL:BB端CABC(即AAL),为1种方式控制背光;continuous clock/Non-continuous clock : Switch clock lane from HS to LP
2.LCM时钟配置
2.1.MIPI接口的PLL计算
MT6582 LCM Driver中配置:params->dsi.PLL_CLOCK = 234;
计算方法:
PLL=((HBP+HFP+HPW)*(VBP+VFP+VPW)*FPS*Bits)/Lane_Num/2
2.2.展频开关
如果MIPI Clock对RF/WCN产生干扰,并且在尝试寻找相应的频点依然无法解除 EMI,可以尝试做Frequency Hopping;
82平台默认打开展频开关,不同于72/89平台,将展频的开关以及展频幅度的选择 ,都开放到LCM Driver中,以如下为例:
params->dsi.ssc_range =4;
params->dsi.ssc_disable = 0;
代表:展频打开,ssc_range = 4%
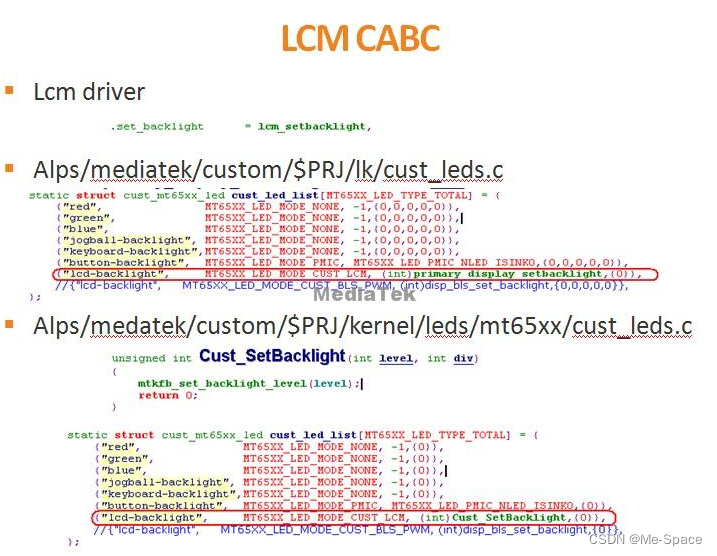
2.3.AAL与CABC背光选择(两种方式控制背光)
参考[FAQ05966]
89平台支持BB端CABC(即AAL)或LCM端CABC方式控制背光,两种方式使用方法如下
【BB端CABC(即AAL)】
- 打开功能,向MTK申请patch,并在ProjectConfig.mk中打开MTK_AAL_SUPPORT = yes
【LCM端CABC】 - 对于Video Mode,ALPS.JB2.MP.V1.3(包括1.3)之前的版本,请向MTK申请patch
- lcm driver中实现set_backlight接口
- cust_leds.c(包括lk与kernel中的两支文件)设置如下
2.4. 调整Display 消耗的BW(bandwidth带宽)方法
•LCM driver建议如下:
–MIPI的clock 尽量低,建议60fps
–For DSI Video mode,建议不要使用burst mode(比较能吃BW)
params->dsi.mode = BURST_VDO_MODE;
–Video mode的时序,blank 区间(如VBP/VFP/HBP/HFP)尽量少(当然也需要满足LCM
module的spec)
2.5.DSI video mode相关参数配置方法
对应配置文件:\alps\mediatek\custom\common\kernel\lcm\xxxx.c中lcm_get_params()函数
1、data lane每帧回LP11(Low Power state,dp,dn都为高电平),clk一直HS( High Speed),对应配置:
params->dsi.cont_clock=1;
params->dsi.clk_lp_per_line_enable=0;
2、data lane每一行回一次LP11,clk lane每一帧回一次LP,对应配置:
params->dsi.cont_clock=0;
params->dsi.clk_lp_per_line_enable=0;
3、data lane和clk lane都是每行回一次LP11,对应配置:
params->dsi.cont_clock=0;
params->dsi.clk_lp_per_line_enable=1;
2.6.LCM CABC 配置
参考[FAQ12413]
95 平台如何配置改用lcm cabc控制屏的背光
2.7.ESD机制各个平台的差异
对于89/72/82等新平台,Display架构做了调整,ESD的实现方式与之前的75/77等平台稍有差异。对于之前75/77平台,可以参考FAQ03210及FAQ05163.新旧架构下,主要是DSI Video Mode下ESD方式不一样。之前的架构下Video Mode的屏采用检测外部TE或者内部TE来做ESD Check,因此需要在lcm driver中配置相应的参数。新架构下不支持外部TE或内部TE来做ESD check, lcm_get_params中关于esd的参数不用再配置。如lcm_int_te_monitor、lcm_int_te_period、lcm_ext_te_monitor等无需配置。
[SOLUTION]
新的Display架构下,DSI Video Mode及DSI Command Mode都采用读寄存器的方式来进行esd check.因此都只需要在lcm driver中实现esd_check和esd_recover函数即可。
对于具体读取哪些寄存器来进行esd check,需要与屏厂确认。
ESD实现后如果出现每两秒闪屏的问题,可以按如下流程处理:
1. 首先检查esd check中是否添了过多的log信息或者有delay操作,建议先去掉所有log测试。
2. 如果依然出现每两秒闪屏,可参考FAQ05680和FAQ05681进行处理。
2.8.LCM Porting时如何配置Clock
clock配置方法:
lcm driver中配置clock有不同的方式,曾经使用过的配置方法有如下几种:
Type1: 配置倍频与分频参数:dsi.pll_div1(倍频), dsi.pll_div2(分频)— (适用于75/77等之前的平台)
Type2: 配置倍频与分频参数:dsi.pll_fbk_div(倍频), dsi.pll_div1 & dsi.pll_div2 (分频)—(适用于89/72等前 期版本)
Type3: 直接配置clock lane频率:dsi.PLL_CLOCK(前期配置成枚举值,后期将直接配置成对应的频率常数值)----(适 用于89/72/82…)
2.9.如何使用PMIC的LDO方式供给LCM端 1.8/2.8v的电压
参考[FAQ10038]
1、 如何在开机阶段使用PMIC的LDO方式供给LCM端1.8/2.8v的电压?
2、如何在suspend/resume的时候,断掉/供给LCM端1.8/2.8v的电压?
1)在开机的时候,建议在preloader或者LK阶段就通过PMIC的LDO方式来给LCM端上电,比如可以在alps\mediatek\platform\mt6589\preloader\src\drivers\mtk_pmic_6320.c文件里面的 pmic6320_init函数中做上电1.8/2.8v的操作。
AOSP版本mtk_pmic_6320.c的路径 :alps/bootable/bootloader/preloader/platform/mt6572/src/drivers/mtk_pmic_6320.c
下面是在LK阶段的上电/掉电方法:
使用upmu_common.c文件里面API来分别控制每一个LDO_VGPX。
比如:
upmu_set_rg_vgp6_vosel用来控制上电的电压值;
upmu_set_rg_vgp6_en用来控制enable VGP6这个pin。
2)因为在suspend/resume的时候,kernel都是跑起来的,所以上电/掉电 1.8/2.8v的操作都应该放在kernel里面。
下面是在kernel里面的上电/掉电方法,在kernel里面有统一的上电/掉电的接口函数: 上电接口函数:hwPowerOn 掉电接口函数hwPowerDown
以下以PMIC6320的VGP6为例。
请在您要上电的文件#include <mach/mt_pm_ldo.h> 上电请调用 hwPowerOn,掉电请调用hwPowerDown。
hwPowerOn(MT65XX_POWER_LDO_VGP6, VOL_2800, "ldo_test");
bool hwPowerDown(MT65XX_POWER_LDO_VGP6, "ldo_test");
2.10.如何拉低并保持LCM RESET PIN脚为低 电平
平台默认RESET PIN脚输出为高平的,如果一定需要拉低,可以配置RESET PIN脚为GPIO模式,再通过GPIO方式拉低。
使用mediatek/dct目录下的DCT工具,使用其打开custom/XXX/kernel/dct/dct目录下的DWS文件,将GPIO131配置成 0:GPIO131.
对GPIO PIN脚的控制有如下一些方法:
lcm_util.set_gpio_mode(GPIO131, GPIO_MODE_00);
lcm_util.set_gpio_dir(GPIO131,GPIO_DIR_OUT);
lcm_util.set_gpio_out(GPIO131,0);
2.11.如何调节MIPI接口驱动能力
在使用DBI、DPI的MIPI接口时,可以在lcm_get_params函数中设置参数 io_driving_current的值来配置IO的驱动电流(6589上面不支持)DSI的MIPI接口,不支持IO驱动电路的调节 ,其可选值的大小可以在lcm_drv.h看到定义。
其可选值的大小可以在lcm_drv.h看到定义:
typedef enum{
}LCM_DRIVING_CURRENT;
该值的会在lcd_drv.c文件中写到寄存器中:
LCD_STATUS LCD_Set_DrivingCurrent();
2.12.如何通过检测外部TE实现esd check的 功能
在72/82/92的JB/KK版本,我们都是通过读取esd寄存器的方式实现esd check,但是由于esd check的时候会切换到cmd mode去读,所以屏的玻璃存在最大1帧时间的等待,如果这个vdo
mode屏的玻璃延时等待时间较小(小于切换的时间),就会出现闪屏,所以不能使用读esd寄存器 的方式做esd check。
如果这个屏有 external TE管脚的话,可以通过检测ext.TE的方式来做esd check,具体原理 为:把原来的esd流程全部关闭,启动一个新的线程,循环检测外部TE中断,如果检测失败,就
recovery。
新的esd流程里面需要做三件事:
1)物理连接一根外部TE pin,然后在dws文件里面配置一个GPIO口为DSI_TE模式。
2)在DSI初始化的时候,注册该ext.TE的irq处理函数,收到中断则设置irq_flag为TRUE。
3)启动线程定时去wait flag==1,如果超时,则做esd recovery。
2.13.如何配置DSI时钟频率
1)DSI vdo mode下的数据速率data_rate的大致计算公式为:
Data rate= (Height+VSA+VBP+VFP)*(Width+HSA+HBP+HFP)*total_bit_per_pixel*frame_per_second/total_lane_num
2)DSI cmd mode下的数据速率data_rate的大致计算公式为:
Data rate= width*height*1.2* total_bit_per_pixel*frame_per_second/total_lane_num
参数注释:
data_rate : 表示的是数据速率
width,height :屏幕分辨率
VSA VBP VFP :DSI vdo mode的vertical porch配置参数
HSA HBP HFP :DSI vdo mode的horizontal porch配置参数
total_bit_per_pixel :表示的是一个pixel需要用几个bit来表示,比如RGB565的话 就是16个bit
frame_per_second :就是我们通常看到的fps,叫做帧率,表示每秒发送多少个帧 ,一般是60帧每秒
total_lane_num :表示的是data lane的对数。
3)DSI采用的是双边采样,则clk等于数据速率的一半,因此: clk=data_rate/2
有两种配置clk的方式,第一种方式配置四个参数得到,第二种配置方式直接配置频 率,建议采用第二种。
第一种方式,通过div分频倍频实现,各个平台略有差异,但是原理基本一致,请参 考porting guide,如下举例89平台:
params->dsi.pll_div1 = ; //配置范围为0,1,2,3的时候,对应的 div1_real等于1,2,4,4
params->dsi.pll_div2 = ; //配置范围为0,1,2,3的时候,对应的 div2_real等于1,2,4,4
params->dsi.fbk_div = ; //范围 0..63
params->dsi.fbk_sel = ; //配置范围为0,1,2,3的时候,对应的 fbk_sel_real等于1,2,4,4
输出频率 =26MHz*(fbk_div+1)*(2*fbk_sel_real)/(div1_real*div2_real)
第二种方式,直接配置clk大小:
params->dsi.PLL_CLOCK = LCM_DSI_6589_PLL_CLOCK_234;//这里举例89平台,使用 一个宏,表示配置的clk等于234MHz。但是在89之后的平台,使用直接配置一个频率
数字的方式,比如params->dsi.PLL_CLOCK = 234,表示234MHZ)
4)在lcm porting过程中,这些参数都定义在lcm_drv.h文件中的LCM_DSI_PARAMS结 构体中,随着平台的发展,或许有所不同,但是基本原理都是一致的,如何配置clk的大小,请先根据自己的帧率、像素格式、porch值、屏的分辨率、data lane对数等计算出data_rate,然后计算出clk。
2.14.背光模式设置成 T65XX_LED_MODE_CUST_BLS_PWM,如何修改PWM的工作频率
前提:cust_leds.c文件里面使用的背光模式是MT65XX_LED_MODE_CUST_BLS_PWM
MT6582版本工作频率计算公式如下:
PWM工作频率计算公式:26MHz (clock freq)/(PWM_CLKDIV+1)/ 1024 (period) 26 KHz
所以需要修改PWM的工作频率,可以通过修改PWM_CLKDIV,clock freq,或者period的值来达到修 改PWM的工作频率的效果。
以下的三种方法可以任选1~2种来达到想要的PWM工作频率:
1、 修改分频参数方法,修改config_data里面的第二个参数:
{"lcd-backlight", MT65XX_LED_MODE_CUST_BLS_PWM, (int)disp_bls_set_backlight,{0, 1, 0, 0, 0}} //设置div=1
2、修改clock freq:
在alps\mediatek\platform\mt6582\kernel\drivers\dispsys\ddp_bls.c文件的 disp_bls_init和disp_bls_config函数中设置CLK_CFG_1这个寄存器的值,来选择合适的时钟源,加入如下代码:
mt65xx_reg_sync_writel(DRV_Reg32(CLK_CFG_1) | (0x00000003), CLK_CFG_1); //设置156 MHz的时钟源 。
二、Driver - Battery Charging
1.充电方式
a.PMIC直接充电:驱动代码位于mediatek\platform\mt6592\kernel\drivers\power\charging_hw_pmic.c
b.switch charge方式充电(switch charger是功率转换型的芯片)。驱动代码位于:mediatek\platform\mt6592\kernel\drivers\power\charging_hw_xxxx.c
比如:fan5405 对应的文件就是charging_hw_fan5405.c
bq24158对应的文件就是charging_hw_bq24158.c
具体配置位于:
MTK_FAN5405_SUPPORT=no
MTK_FASTBOOT_SUPPORT=no
2.driver中mdelay() 与msleep()的区别使用
在Linux Driver开发中,经常要用到延迟函数:msleep,mdelay,udelay。
虽然msleep和mdelay都有延迟的作用,但他们是有区别的。
1)对于模块本身
mdelay是忙等待函数,在延迟过程中无法运行其他任务。这个延迟的时间是准确的。是需要等待多少时间就会真正等待多少时间。
msleep是休眠函数,它不涉及忙等待.你如果是msleep(10),那实际上延迟的时间,大部分时候是要多于10ms的,是个不定的时间值。
他们的差异,平时我也讲的出来,可是真正用起来的时候,就忘记了。曾在两个driver的i2c的code中,需要用到delay函数,而我用了msleep函数,一直I2C速度超慢。而我又不知道哪里出了问题,我潜意识中,认为我只delay了1ms,可是,实际上是十几毫秒。
2)对于系统
mdelay() 会占用cpu资源,导致其他功能此时也无法使用cpu资源。
msleep() 则不会占住cpu资源,其他模块此时也可以使用cpu资源。
delay函数是忙则等待,占用CPU时间;而sleep函数使调用的进程进行休眠。
3)udelay() mdelay() ndelay() 区别
udelay(); mdelay(); ndelay();实现的原理本质上都是忙等待,ndelay和mdelay都是通过udelay衍生出来的。
我们使用这些函数的实现往往会碰到编译器的警告implicit declaration of function ‘udelay’,这往往是由于头文件的使用不当造成的。
在include/asm-***/delay.h中定义了udelay(),而在include/linux/delay.h中定义了mdelay和ndelay。
udelay一般适用于一个比较小的delay,如果你填的数大于2000,系统会认为你这个是一个错误的delay函数,因此如果需要2ms以上的delay需要使用mdelay函数。
4)msleep,ssleep区别
休眠单位不同
5)秒的单位
ms是毫秒=0.001秒。
us是微秒=0.000001秒。
ns是纳秒=0.000000001秒。
3.如何配置关机充电(KPOC)中的 长按开机时间
file path:alps/mediatek/platform/mt6589/kernel/drivers/power/pmic_mt6320.c
modify:#define LONG_PWRKEY_PRESS_TIME 2000*1000000
4.电池充电报警克制化
手机充电出现异常的报警主要有:
1) 充电电压超过正常允许的电压范围。
2)电池温度超过允许的电池温度。
3)长时间的超过1A的大电流充电。
4)电池电压超过允许的电池电压范围。
5)总的充电时间超过24h。
配置文件:alps\mediatek\custom\{project}\kernel\battery\battery\cust_battery.h
与上述5个报警相对应的宏:
#define BATTERY_NOTIFY_CASE_0001
#define BATTERY_NOTIFY_CASE_0002
#define BATTERY_NOTIFY_CASE_0003
#define BATTERY_NOTIFY_CASE_0004
#define BATTERY_NOTIFY_CASE_0005
5.如何读取及设置PMIC registers
1)进入工程模式,读取和设置
拨号界面 —>输入*## 3646633##* 进入工程模式 power —>pmu —> pmu register或者hardware testing —>power —> pmu —>pmu register ,所有读写都是16进制。
2)程序运行时,如何通过ADB cmd 获取及设置pmic registers?
adb shell cd /sys/devices/platform/mt-pmic
6.关于功耗问题
1)第三方apk引起的,先予以排除;
2)wake up by RTC:kernel_log中查找wake up by RTC,分析唤醒源;
3)wake up by CCIF_MD;
4)wake up by EINT。
7.高温高压后如何恢复充电
参考[FAQ10404]
在充电的过程中,如果出现高温或者高压的情况下, 系统会停止充电, 当温度或者充电器的电压值恢复正常后,如何恢复充电。
按照如下方式修改code:
1.高温后温度正常,恢复充电
mediatek\kernel\drivers\power\battery_common.c
#define RECOVERY_CHARGING_TEMPERATURE xx
mt_battery_checkBatteryTemp()
增加变量static KAL_BOOL g_overTemp = KAL_FALSE;
在
if(BMT_status.temperature >= MAX_CHARGE_TEMERATURE)
{
battery_xlog_printk(BAT_LOG_CRTI, "[BATTERY] Battery Over Temperature !! \n\r");
status = PMU_STATUS_FAIL;
g_overTemp = KAL_TRUE; //add here
}
然后在
return status;之前增加
if((g_overTemp == KAL_TRUE) && (BMT_status.temperature <= RECOVERY_CHARGING_TEMPERATURE))
{
battery_xlog_printk(BAT_LOG_CRTI, "[BATTERY] recovery charging after over temperature!! \n\r");
g_overTemp = KAL_FALSE;
status = PMU_STATUS_OK;
BMT_status.bat_charging_state = CHR_PRE;
}
2.高压后充电器电压恢复正常后恢复充电
mediatek\kernel\drivers\power\battery_common.c
#define RECOVERY_CHARGING_VOLTAGE xx
mt_battery_checkChargerVoltage()
在if(BMT_status.charger_exist == KAL_TRUE)
{
...
//最后添加下面一段code
if((BMT_status.charger_protect_status == charger_OVER_VOL) && (BMT_status.charger_vol <= RECOVERY_CHARGING_VOLTAGE ))
{
battery_xlog_printk(BAT_LOG_CRTI, "[BATTERY] recovery charging afer over voltage !! \r\n");
BMT_status.charger_protect_status = 0;
BMT_status.bat_charging_state = CHR_PRE;
status = PMU_STATUS_OK;
}
}
三、Driver input system
1.如何添加新的kernel模块
参考 [FAQ08517]
(1)create new folder
alps\mediatek\custom\common\kernel\newdevice\device_a
-->notice need create 2 folder: newdevice\device_a
(2) copy your code in device_a(code can not include makefile file)
(3) Add CUSTOM_KERNEL_NEWDEVICE=device_a to projectconfig.mk
(4) compiling kernel
2.时钟周期和时钟频率的换算问题
F代表频率,单位是Hz; T代表周期,单位是s
频率等于一除以周期, 写成公式就是: F (Hz) = 1 / T (s) ,所以倒过来就有周期等于一除以频率,写成公式就是:T = 1 / F,120MHZ = 120x10^6HZ,所以 T = 1/(120x10^6) = 8.3 x 10^(-9) s = 8.3ns。
执行时间/时钟周期 = 周期数
执行时间*时钟频率 = 周期数
时钟周期 = 1/时钟频率
举例说明:
dws中的Keypress_Perio是消抖周期,基准时钟是32K。如果是1024个周期,则消抖时间是32ms;
即:消抖时间 =(1/32000)*1024 s =0.032s =32ms
3.触摸屏的供电配置
VDD VGP 供电区别
4.TP上实现虚拟按键功能
参考[FAQ02518]
添加tp的virtual key,需在tp对应的头文件中添加如下设置:
1)定义宏TPD_HAVE_BUTTON;
2)定义TPD_BUTTON_HEIGHT,TPD_KEY_COUNT,TPD_KEYS和TPD_KEYS_DIM,分别用于定义button被识 别的纵向坐标,button的个数,对应的功能键,和每个功能键的坐标。
配置示例:
#define TPD_HAVE_BUTTON
#define TPD_BUTTON_HEIGHT 480 //这个不小于LCD的分辨率的height
#define TPD_KEY_COUNT 4
#define TPD_KEYS {KEY_MENU, KEY_HOME, KEY_BACK, KEY_SEARCH}
#define TPD_KEYS_DIM {{40,500,40,60},{120,500,40,60},{200,500,40,60},{280,500,40,60}}
其中,{40,500,40,60}对应了KEY_MENU的坐标, (40,50)是该key center的坐标,40是该键的宽度 ,60是该键的高度。
3)button定义初始化成功后,通过adb shell,可以在/sys/board_properties/virtualkeys.mtk- tpd中看到这些button的定义。
5.TP虚拟按键背光灯时间控制
adjust powermanagerservice.java define LONG_KEYLIGHT_DELAY value
6.I2C传输数据速率设定方式
在进行i2c 传输前设置,i2c_client->timing = timing_number;
备注:
1)当设备不支持快速mode timing_number <= 100;
2)当设备支持快速mode timing_number <= 400;
四、Driver - Misc
1.关于MTK平台支持的耳机
一般手机(包括Nokia、三星等)是:L、R、MIC、GND。
小米、iPhone、HTC等是:L、R、GND、MIC。
MTK 平台目前支持第一种:L、R、MIC、GND。 (对于一般3线制耳机MTK也支持)。
2.DCT配置GPIO的设置/初 始化
1)当配置GPIO时,有的有勾选M0~M7中的两个,甚至有的还需要勾选勾选多个?最后GPIO配置成了 哪个功能呢?
(1) GPIO在系统初始化后的mode是由Def.Mode这一栏决定的。
(2) 如果勾选了M0-M7中的某些项,则会生成类似 #define GPIO_UART_UTXD4_PIN_M_GPIO GPIO_MODE_00 这样的宏定义,在code中可以直接使用。
(3) 但是系统初始化后的mode还是以Def.Mode这一栏的选择为准。
2)当配置成NC的gpio实际开机后是个什么状态?
通常是Mode 0,GPIO Mode,输入模式,使能内部下拉。
3) 修改了DCT中的GPIO Setting后,怎样编译?
./mk [Project_Name] new preloader
./mk [Project_Name] new uboot/lk
./mk [Project_Name] new kernel
./mk [Project_Name] bootimage
4)MT6589的dct配置的参数是在代码的哪个地方生效?
LK中生效, 具体位置如下:mediatek/platform/mt6589/lk/mt_gpio_init.c 函数为void platform_early_init(void)--> mt_gpio_set_default()
3.耳机检测
82以及之后的平台,请一定要用EINT+ACCDET方式进行耳机检测。
4.Headset accdet常用宏
在accdet.c和accdet_custome.h为了实现一些功能有用到很多宏开关,把目前相应的宏开关介绍如下 :
1)ACCDET_EINT
是否启用了外部中断来侦测是否有耳机插入和拔出
2)ACCDET_MULTI_KEY_FEATURE
是否支持使用A/D来侦测key,这里要注意的是即使耳机只有一个key若是在89的平台也需打开此宏 开关
3)ACCDET_LOW_POWER
当插入三段耳机6s后自动关闭micbias,达到省电的目的
以上三个宏可以看成一个宏
4)ACCDET_28v_MODE
在我们内部有一个switch是针对外部耳机是用2.8还是1.9V的切换开关,美标的是2.8V, 国标的是 1.9V
5) ACCDET_PIN_RECOGNIZATION
美标的插孔识别国标的耳机,国标的耳机识别美标的插孔,目前这个功能还没有实现,此宏不能打开
6)ACCDET_SHORT_PLUGOUT_DEBOUNCE
ACCDET_SHORT_PLUGOUT_DEBOUNCE_CN 25
拔出耳机后有时候图标会再弹出后在消失, 主要解决类似bug
7)ACCDET_PIN_SWAP
美标的插孔识别国标的耳机,这个时候需要借助accdet的一个上拉电阻,当有这种情形的时候AB一 直为0,达到检测到的目的,当然也有误判的时候, 4段耳机按住按键插入后会有误判。
5.如何配置PMIC 上的RST_KEY
路径:
alps/mediatek/custom/$PRJ/kernel/kpd/kpd/mtk_kpd.h
配成 vol- :
#define KPD_PMIC_RSTKEY_MAP KEY_VOLUMEDOWN
配成 home key:
#define KPD_PMIC_RSTKEY_MAP KEY_HOME
7.怎样添加一个自定义的LED灯
- 修改如下两个文件:
alps/mediatek/custom/common/kernel/leds/inc/cust_leds.h
enum mt65xx_led_type
{
MT65XX_LED_TYPE_RED = 0,
... ...
MT65XX_LED_TYPE_LCD,
MT65XX_LED_TYPE_ABC, // Add a new LED type
MT65XX_LED_TYPE_TOTAL,
};
alps/mediatek/custom/YOUR_PRJ/kernel/leds/mt65xx/cust_leds.c
static struct cust_mt65xx_led cust_led_list[MT65XX_LED_TYPE_TOTAL] = {
{"red", MT65XX_LED_MODE_NONE, -1,{0}},
{"lcd-backlight", MT65XX_LED_MODE_CUST, (int)Cust_SetBacklight,{0}},
// Set LED params, Please refer to <Driver all in One>
{"abc-backlight", MT65XX_LED_MODE_CUST, (int)Cust_SetBacklight_abc,{0}},
};
6.如何配置UART1/UART4为Log输 出端口?
路径:mediatek\source\external\mhal\src\custom\common\preloader\inc\cust_bldr.h
#define CFG_LOG_BAUDRATE 921600
#define CFG_UART_LOG (UART1)
可以修改如下宏定义切换log输出口:
mediatek/custom/project_name/preloader/inc/cust_bldr.h: CFG_UART_LOG 定义为 1 or 4
7.如何修改UART输出数据的波特率
有以下3个地方分别控制不同的部分的波特率
1)设置 preloader 波特率,这里不会设置到uboot和kernel文件为mediatek/custom/proj/preloader/inc/cus_bldr.h
#define CFG_LOG_BAUDRATE (115200)
2)修改uboot 波特率
mediatek/custom/proj/uboot/inc/configs/ubconfigs.h
#define CFG_LOG_BAUDRATE (115200)
3)修改kernel 波特率
mediatek/config/mt6575/autoconfig/kconfig/platform
CONFIG_CMDLINE="console=ttyMt3, 115200"
8.如何通过adb shell命令 调试Vibrator
下面的命令是用于调试,请试着用它找出你想要的时间和震动强度。 1000毫秒 = 1秒
adb shell "echo 1000 > /sys/devices/virtual/timed_output/vibrator/enable"
9.ACCDET模块耳机检测的原理
ACCDET内部有两个比较器,会根据传入的电压判断并产生中断。ACCDET的输入电压即耳机 MIC PIN的电压,内部比较器的输出分别对应A/B两个寄存器。
ACCDET内部两个比较器的Vref分别是1.77V和0.4V(硬件决定的,不能修改),所以,对应的电压有 3个范围:
1.77V-1.9V: 未插入耳机的状态(AB=B11)
0.4V-1.77V: 插入4段式(有Mic)耳机时的状态(AB = B01)
0-0.4V : 插入3段式耳机时的状态,或者4段式按键按下时的状态(AB = B00)
耳机的状态会保存到ACCDET的寄存器中,当电压在任意2个范围间切换时,状态发生变化,ACCDET产生中断,中断处理中读取状态寄存器的值,并根据状态的变化做相应的处理.
10.如何调整不同sensor驱动的 加载顺序
在mt6575_devs.c /mt6577_devs.c 文件内 mt6577_board_init函数,修改不同设备的 注册顺序。
如:
platform_device_register(&sensor_alsps);
platform_device_register(&sensor_gsensor);
调整上述的注册顺序,即可调整驱动中probe的加载顺序。
11.SIM1和SIM2两个卡槽交换
修改modem的相关代码, 请做如下修改, 即可交换SIM1 SIM2 Modem:
icc_switchControl_al.c(MOLY\driver\storage\sim\src)
kal_bool sim_physicalSlotChanged = KAL_TRUE;
五、FM
1.FM支持哪些音频方式
Line in模拟方式和I2S数字方式。
硬件工程师要确定原理图上选择的是哪种方式,然后进行如下配置。
Line in:
MTK_FM_RX_AUDIO=FM_ANALOG_INPUT
MTK_FM_TX_AUDIO=FM_ANALOG_OUTPUT
I2S:
MTK_FM_RX_AUDIO=FM_DIGTAL_INPUT
MTK_FM_TX_AUDIO=FM_DIGTAL_OUTPUT
使用dws配置I2S管脚,可以参考FAQ03803中的配置进行。
2.fm如何打开支持50K的feature
修改alps/mediatek/config/[Project]/ProjectConfig.mk文件中的MTK_FM_50KHZ_SUPPORT变量。
设置MTK_FM_50KHZ_SUPPORT=yespatch
3.如何修改6620/6626/6628的FM RSSI门限
RSSI: Receive Signal Strength Indicator 接收信号强度指示
Rx: Recieived power 接收功率
两者意思一样,具体指(前向或者反向)接收机接收到信道带宽上的宽带接收功率。实际上中,前向链路接收机(指手机)接收到的通常用Rx表示,反向链路接收机(指基站侧)通常用反向RSSI表示。
4.如何关闭RDS
由于没有宏用来切换RDS的开启与关闭,直接修改上层APK上的接口isRDSSupported即可。
RDS是数字广播系统,主要在欧洲运用很广泛.它的主要作用是这样的:它有一个优先权的设定特点.你可以设定你喜欢的电台频道,如体育,新闻或军事等,当你的机子收到你所设定的频道信号时,机子正在工作的内容会中止,转而播出这方面的信息.它是数字可字母显示的,没有声音.还有一种功能就是警告中断,当路面有事故发生(如堵车等),电台会播送信号,机子收到就会显示出来,你就可以走别的路了.一般在欧洲的车载电子设备中要求要有这个RDS功能.
5.FM调试文档
alps\mediatek\config\$Project\ProjectConfig.mk
alps\mediatek\config\$Project \autoconfig\kconfig\project
这两支文件中和fm相关的变量设置,例如MTK_FM_SUPPORT、MTK_FM_CHIP、
CONFIG_MTK_FM(这个变量十分重要,决定FM模块是否编译)。
1.1 JNI层编译
编译命令:mk $project mm mediatek\external\fmradio\
1.1.1 alps\mediatek\external\fmradio\Android.mk负责产生linux文件系统中
/system/etc/firmware下的fm的bin文件,目前只针对6628。
1.1.2 alps\mediatek\external\fmradio\fmr\Android.mk负责产生libfmjni.so和libfmar1000.so、libfmmt6616.so、libfmmt6620.so、libfmmt6626.so、libfmmt6626.so、libfmmt6628.so。
1.1.3 alps\mediatek\external\fmradio\custom\Android.mk负责产生libfmcust.so。
1.2 Kernel层编译
编译命令:
MT6620 mk $project n k mediatek\kernel\drivers\combo\drv_fm
MT6628/6626 mk $project n k mediatek\kernel\drivers\fmradio
1.2.1 MT6620
1.2.1.1 alps\mediatek\kernel\drivers\combo\Makefile
1.2.1.2 alps\mediatek\kernel\drivers\combo\drv_fm\Makefile
1.2.1.3 alps\mediatek\kernel\drivers\combo\drv_fm\public\Makefile
1.2.1.4 alps\mediatek\kernel\drivers\combo\drv_fm\private\Makefile
1.2.2 MT6626+MT6628
1.2.2.1 alps\mediatek\kernel\drivers\fmradio\Makefile
1.2.2.2 alps\mediatek\kernel\drivers\fmradio\private\Makefile
FM加载驱动ko文件导致的问题
正常模式:alps\mediatek\config\$project \ init.project.rc
Meta模式:alps\mediatek\config\$project \meta_init.project.rc
工厂模式:alps\mediatek\custom\$project \factory\init.rc
主要是在相关的init文件中加载FM的文件和编译FM driver产生的ko是否一致。
六、Camera
1.MT6575上mclk设为 26Mhz时,占空比不是50%
MT6575上26Mhz mclk设置后占空比不是50%, 量到为61.7%.
2.Camera上电开 power(DVDD, AVDD, IOVDD)之间间隔时间太长
3.如何配置 lens
首先需要向sensor的vendor了解,使用的sensor是否内嵌lens的driver IC,如OV5640和MT9P017就是内嵌lens driver ic的。内嵌lens driver ic,即直接操作sensor的寄存器去推lens。
若sensor没有内嵌lens的driver IC,则需要向模组厂了解,模组是否外挂了lens的driver IC,driver IC的型号是什么。我们codebase里的FM50AF下的代码,对应了AD5820的driver ic。如果您的模组包的也是这颗lens driver IC,则直接配置为fm50af即可;如果是其他型号的driver IC,您也可以尝试使用AD5820的驱动(注意把device address改过来)。
有些sensor自带AF算法。如ov3640是一颗含AF core的sensor,即它自己能够做AF算法。因为YUV+AF要求sensor本身是能自己做AF算法的,所以不是每颗YUV sensor都是支持自动对焦的。如果您使用的sensor含有AF CORE,且您希望使用sensor自己的AF算法来对焦,即可配置为sensordrive,但需要您参照文档ALPS_YUV+AF_customization_and_application_note(请在DMS上搜这篇文档看)对sensor driver做针对AF功能的修改。
4.使用 FM50AF 之外的 Lens Driver的修改
由于root process & global writeable file已经在非PRC(中华人民共和国)地区被强制要求,因此ALPS.ICS2.MP 版本及之后版本对root权限方面做了要求,这个要求对于Camera的影响就是,如果使用 FM50AF 之外的lens driver,需要在 init.rc 文件中增加对新Lens driver权限和用户方面的修改
例如增加了 XXXAF 这个lens driver 需要修改文件 mediatek\config\mt65XX\init.rc
添加下面二行:
chmod 0660 /dev/XXXAF
chown system camera /dev/XXXAF
添加后如下:
#Camera
chmod 0666 /dev/camera-sysram
chmod 0666 /dev/camera-isp
chmod 0660 /dev/camera-eis
chmod 0660 /dev/camera-fdvt
chmod 0666 /dev/camera-resmgr
chmod 0660 /dev/kd_camera_hw
chmod 0660 /dev/kd_camera_flashlight
chmod 0660 /dev/FM50AF
chmod 0660 /dev/XXXAF
chown system camera /dev/camera-sysram
chown system camera /dev/camera-isp
chown system camera /dev/camera-eis
chown system camera /dev/camera-fdvt
chown system camera /dev/camera-resmgr
chown system camera /dev/kd_camera_hw
chown system camera /dev/kd_camera_flashlight
chown system camera /dev/FM50AF
chown system camera /dev/XXXAF
5.如何修改I2C speed
Mediatek\custom\common\kernel\imgsensor\src\kd_sensorlist.c
iWriteReg()中最前面加上g_pstI2Cclient->timing,表示设置I2C的速度
如果不设置,为默认值100K ,比如想将I2C的speed设置为400K,可将g_pstI2Cclient->timing设置为400K。
6.如何打开或者关闭闪光灯
打开/关闭闪光灯可以通过如下配置(两种方法) :
1) 在alps/mediatek/config/pjt/ProjectConfig.mk 文件中,按照如下配置
CUSTOM_HAL_FLASHLIGHT = constant_flashlight #dummy_flashlight
CUSTOM_KERNEL_FLASHLIGHT = constant_flashlight #dummy_flashlight
2)在feature table中把flash相关的feature 打开/关闭
RAW sensor 涉及的文件
(1)alps\mediatek\custom\project name\hal\camera\camera 目录下cfg_ftbl_custom_raw_main.h
(2)alps\mediatek\custom\common\hal\camera\camera 目录下cfg_ftbl_custom_raw_main.h
(3)alps\mediatek\source\external\mhal\src\core\drv\6575\isp目录下 cfg_ftbl_raw_sceneindep.h
YUV sensor 涉及的文件
(1)alps\mediatek\custom\project name\hal\camera\camera 目录下cfg_ftbl_custom_yuv_main.h
(2)alps\mediatek\custom\common\hal\camera\camera 目录下cfg_ftbl_custom_yuv_main.h
(3)alps\mediatek\custom\common\hal\imgsensor\xxx_yuv目录下cfg_ftbl_xxx_yuv.h
规则:优先级,1) > 2) > 3),即如果project name下相应的的文件,则只需要在相应的文件中打开flash相关的 feature,如果没有,则在2)中的文件打开/关闭:
#if 1//0
// Flash Light
CONFIG_FEATURE(FID_AE_STROBE,
BY_DEFAULT(FLASHLIGHT_FORCE_OFF),
FLASHLIGHT_AUTO, FLASHLIGHT_FORCE_ON, FLASHLIGHT_FORCE_OFF
)
#endif
7.如何控制mclk的开关
由于mclk在sensor上电之前就已经开了,如果不满足sensor spec中上电时序要求,可在开sensor power之前将mclk先 关闭,然后再需要时再打开,如何控制mclk的开关呢?
可调用void mt_isp_mclk_ctrl(int en) API去控制,(mediate\platform\mt6575\kernel\core\mt6575_isp.c)
8.如何调整闪光灯在 auto模式下的打闪阈值
参考[FAQ03033]
修改camera_ae_plinetable_xxx_mt657X.h文件注释为u4StrobeTrigerBV的值,例如下面代码:
static strAETable g_AE_CaptureTable =(
20, //u4StrobeTrigerBV
);
这一行, 这个值越大越容易打闪,越小越不容易打闪

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









