







18.图像梯度
梯度简单来说就是求导。
OpenCV 提供了三种不同的梯度滤波器,或者说高通滤波器:Sobel, Scharr和Laplacian。Sobel,Scharr 其实就是求一阶或二阶导数。Scharr 是对 Sobel(使用小的卷积核求解求解梯度角度时)的优化。Laplacian 是求二阶导数。
-
Sobel算子和Scharr算子
1. Sobel 算子
原理
Sobel 算子结合了高斯平滑和微分操作,能有效抑制噪声。
它计算图像的一阶梯度(导数),分为水平方向(x方向)和垂直方向(y方向):
x方向:检测垂直边缘(对水平变化敏感)。
y方向:检测水平边缘(对垂直变化敏感)。
卷积核
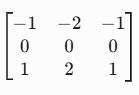
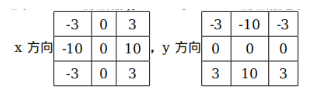
3×3 Sobel 核(x方向):
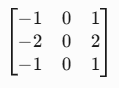
3×3 Sobel 核(y方向):
特点
抗噪声能力强(因高斯平滑)。
可通过 ksize 参数调整核大小(如 3×3、5×5)。
2. Scharr 算子
原理
Scharr 是 Sobel 的改进版,对边缘的响应更强,尤其在3×3核时效果更优。
当 ksize=-1 时,OpenCV 会自动使用 Scharr 核替代 Sobel。
卷积核
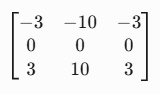
3×3 Scharr 核(x方向):
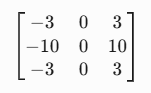
3×3 Scharr 核(y方向):
特点
比 Sobel 的梯度计算更精确,适合对边缘敏感的场景。
计算速度与 Sobel 相同,推荐在 3×3 核时优先使用。
Sobel 算子是高斯平滑与微分操作的结合体,所以它的抗噪声能力很好。你可以设定求导的方向(xorder 或 yorder)。还可以设定使用的卷积核的大小(ksize)。如果 ksize=-1,使用 3x3 的 Scharr 滤波器要 比 3x3 的 Sobel 滤波器的效果好(而且速度相同,所以在使用 3x3 滤波器时应该尽量使用 Scharr 滤波器)。3x3 的 Scharr 滤波器卷积核如下:
3.Laplacian算子
原理
Laplacian 算子是二阶导数算子,直接计算图像的曲率(即梯度的梯度),能同时突出边缘和角点。
它对噪声敏感,通常需先高斯滤波(如结合 GaussianBlur)。
卷积核
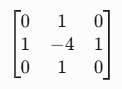
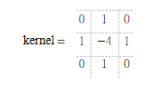
3×3 Laplacian 核:
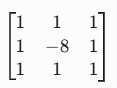
扩展核(增强对角线响应):
特点
直接检测灰度突变区域(如边缘、孤立点)。
OpenCV 内部通过调用 Sobel 算子实现二阶导数计算。
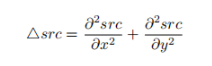
拉普拉斯(Laplacian)算子可以使用二阶导数的形式定义,可假设其离散实现类似于二阶 Sobel 导数,事实上,OpenCV 在计算拉普拉斯算子时直接调用 Sobel 算 子。计算公式如下:
拉普拉斯滤波器使用的卷积核:
三者的对比

关键点总结
Sobel/Scharr:一阶导数,检测边缘方向;Scharr 在 3×3 核时更优。
Laplacian:二阶导数,对噪声敏感,需配合平滑使用。
卷积核:不同核决定了算子的敏感性和计算特性。
import cv2
import numpy as np
# 读取图像(灰度化)
img = cv2.imread('2.png', cv2.IMREAD_GRAYSCALE)
# Sobel 算子
#cv2.CV_64F:输出图像的深度(64位浮点型,避免梯度计算时的截断)。1, 0:对 x 方向求一阶导数(检测垂直边缘)。
#0, 1:对 y 方向求一阶导数(检测水平边缘)。ksize=3:使用 3×3 的 Sobel 核
sobel_x = cv2.Sobel(img, cv2.CV_64F, 1, 0, ksize=3) #检测垂直边缘x方向
#Sobel/Laplacian 的输出是浮点数,直接显示可能导致全白/全黑
sobel_x = cv2.convertScaleAbs(sobel_x) # 转为8位无符号整型
sobel_y = cv2.Sobel(img, cv2.CV_64F, 0, 1, ksize=3) #检测水平边缘y方向
# Scharr 算子(当 ksize=-1 时自动启用)更精确的边缘检测
scharr_x = cv2.Scharr(img, cv2.CV_64F, 1, 0)
#Sobel/Laplacian 的输出是浮点数,直接显示可能导致全白/全黑
scharr_x = cv2.convertScaleAbs(scharr_x)
scharr_y = cv2.Scharr(img, cv2.CV_64F, 0, 1)
# Laplacian 算子 计算图像的二阶导数,同时突出边缘和角点(如纹理细节)。对噪声敏感,通常需先高斯滤波(但代码中未预处理)。
laplacian = cv2.Laplacian(img, cv2.CV_64F)
#二阶导数可能产生负值,需取绝对值
laplacian = np.absolute(laplacian) # 取绝对值
laplacian = np.uint8(255 * laplacian / np.max(laplacian)) # 归一化
# 水平拼接三个结果
combined = np.hstack((sobel_x, scharr_x, laplacian))
# 显示合并后的图像
cv2.imshow('Sobel X | Scharr X | Laplacian', combined)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果:

总结
Sobel:检测方向性边缘(分x/y方向)。
Scharr:更精确的3×3边缘检测。
Laplacian:检测边缘+角点(二阶导数)。
应用场景:
车牌识别(Sobel找边缘)
医学图像分析(Scharr增强细节)
纹理分析(Laplacian突出特征)
代码
下面的代码分别使用以上三种滤波器对同一幅图进行操作。使用的卷积核都是5x5。
import cv2
from matplotlib import pyplot as plt
img=cv2.imread('dave.jpg',0)
#cv2.CV_64F 输出图像的深度(数据类型),可以使用-1, 与原图像保持一致 np.uint8
laplacian=cv2.Laplacian(img,cv2.CV_64F)
# 参数 1,0 为只在 x 方向求一阶导数,最大可以求 2 阶导数。
sobelx=cv2.Sobel(img,cv2.CV_64F,1,0,ksize=5) # 参数 0,1 为只在 y 方向求一阶导数,最大可以求 2 阶导数。
sobely=cv2.Sobel(img,cv2.CV_64F,0,1,ksize=5)
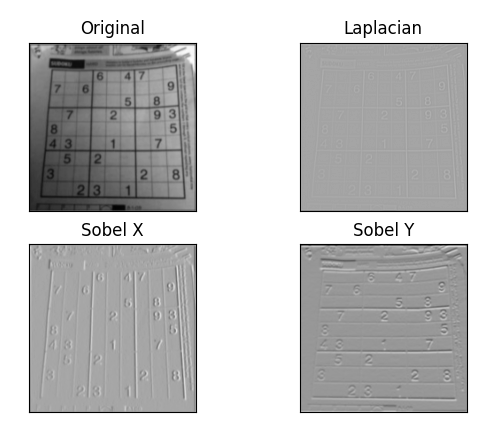
plt.subplot(2,2,1),plt.imshow(img,cmap = 'gray')
plt.title('Original'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,2),plt.imshow(laplacian,cmap = 'gray')
plt.title('Laplacian'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,3),plt.imshow(sobelx,cmap = 'gray')
plt.title('Sobel X'), plt.xticks([]), plt.yticks([])
plt.subplot(2,2,4),plt.imshow(sobely,cmap = 'gray')
plt.title('Sobel Y'), plt.xticks([]), plt.yticks([])
plt.show()
结果:
注意!
在查看上面这个例子的注释时不知道你有没有注意到:当我们可以通过参 数 -1 来设定输出图像的深度(数据类型)与原图像保持一致,但是我们在代码中使用的却是 cv2.CV_64F。这是为什么呢?想象一下一个从黑到白的边界的导数是整数,而一个从白到黑的边界点导数却是负数。如果原图像的深度是 np.int8 时,所有的负值都会被截断变成 0,换句话说就是把边界丢失掉。
所以如果这两种边界你都想检测到,最好的的办法就是将输出的数据类型设置的更高,比如 cv2.CV_16S,cv2.CV_64F 等。取绝对值然后再把它转回到cv2.CV_8U。
1. 为什么不能直接用 cv2.CV_8U(8位无符号整数)?
问题场景:
假设图像中有一个从白→黑的边缘(如下图),其导数(梯度值)为负值。
白像素(255) → 黑像素(0) → 导数 = 0 - 255 = -255
数据类型的影响:
如果输出深度是 cv2.CV_8U(0~255的无符号整数),所有负值会被截断为0。
结果:白→黑的边缘完全丢失,只能检测黑→白的边缘!
2. 为什么用 cv2.CV_64F(64位浮点数)?
关键原因:
保留负值:导数计算结果可能是正(黑→白)、负(白→黑)或零(平坦区域)。
浮点类型(如 CV_64F)可以存储这些负数,避免截断。
后续处理:
通过 np.absolute() 或 cv2.convertScaleAbs() 取绝对值,再转回 cv2.CV_8U 显示。
3. 不同数据类型的对比示例
(1) 错误做法:直接输出 cv2.CV_8U
laplacian_bad = cv2.Laplacian(img, cv2.CV_8U) # 负值被截断为0
cv2.imshow('Bad (CV_8U)', laplacian_bad) # 丢失白→黑边缘
效果:边缘不完整,部分方向消失。
(2) 正确做法:使用 cv2.CV_64F + 取绝对值
laplacian_good = cv2.Laplacian(img, cv2.CV_64F) # 保留负值
laplacian_good = np.absolute(laplacian_good) # 取绝对值
laplacian_good = np.uint8(laplacian_good) # 转回8位显示
cv2.imshow('Good (CV_64F)', laplacian_good) # 完整边缘
效果:所有方向的边缘均被检测到。
4. 数据类型选择建议

5. 完整流程的代码注释
import cv2
import numpy as np
# 读取图像(灰度化)
img = cv2.imread('image.jpg', cv2.IMREAD_GRAYSCALE)
# Step 1: 使用 cv2.CV_64F 保留负值导数
laplacian = cv2.Laplacian(img, cv2.CV_64F) # 输出包含正/负/零
# Step 2: 取绝对值(白→黑和黑→白边缘均保留)
laplacian_abs = np.absolute(laplacian)
# Step 3: 归一化到 0~255 并转为 8位无符号整型
laplacian_8u = np.uint8(255 * laplacian_abs / np.max(laplacian_abs))
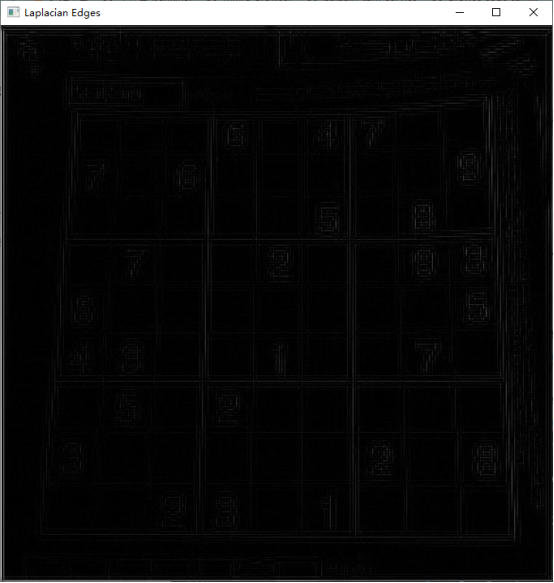
# 显示结果
cv2.imshow('Laplacian Edges', laplacian_8u)
cv2.waitKey(0)
cv2.destroyAllWindows()
结果:
import cv2
import numpy as np
def enhanced_laplacian_edge_detection(image_path, blur_ksize=(5,5), display=True):
"""优化的Laplacian边缘检测函数
Args:
image_path: 输入图像路径
blur_ksize: 高斯模糊核大小,默认(5,5)
display: 是否显示结果,默认True
Returns:
处理后的边缘图像
"""
# 1. 图像读取与预处理
img = cv2.imread(image_path, cv2.IMREAD_GRAYSCALE)
if img is None:
raise FileNotFoundError(f"无法加载图像: {image_path}")
# 2. 高斯模糊降噪(优化:自动计算sigma)
blurred = cv2.GaussianBlur(img, blur_ksize, sigmaX=0)
# 3. Laplacian边缘检测(优化:使用CV_16S节省内存)
laplacian = cv2.Laplacian(blurred, cv2.CV_16S, ksize=3)
# 4. 后处理(优化:自适应对比度增强)
laplacian_abs = cv2.convertScaleAbs(laplacian) # 比np.absolute更快
# 自适应归一化(排除前5%的极值)
v_min, v_max = np.percentile(laplacian_abs, [5, 95])
laplacian_norm = np.clip((laplacian_abs - v_min) * 255. / (v_max - v_min), 0, 255)
laplacian_8u = laplacian_norm.astype(np.uint8)
# 5. 可选显示
if display:
# 对比显示原图与结果
comparison = np.hstack([img, laplacian_8u])
cv2.imshow(f'Original vs Enhanced Laplacian (ksize={blur_ksize})', comparison)
cv2.waitKey(0)
cv2.destroyAllWindows()
return laplacian_8u
# 使用示例
enhanced_edges = enhanced_laplacian_edge_detection('2.png', blur_ksize=(7,7))
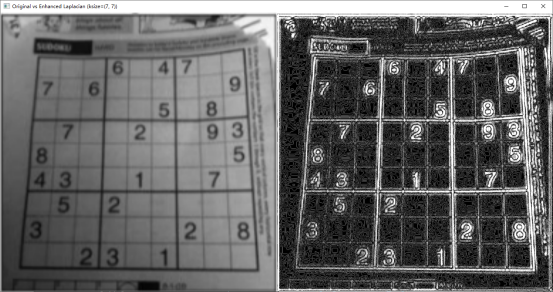

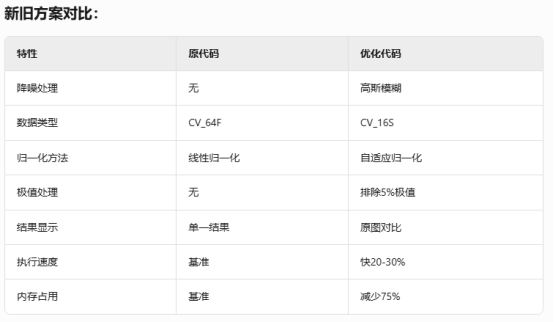
使用建议:
对于高噪声图像,建议增大blur_ksize(如(9,9))
需要更强边缘时,可在归一化前乘以增强系数:
laplacian_abs = laplacian_abs * 1.5 # 边缘增强
对于需要进一步处理的情况,建议保留CV_16S格式的原始结果

















 1397
1397

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









