







1、问题描述
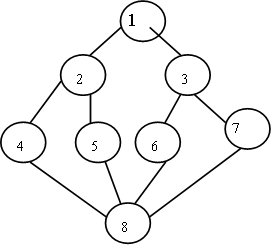
对给定的下图采用邻接表结构存储,并分别用深度优先和广度优先搜索对图进行遍历。
#include<iostream>
#include<stdlib.h>
#include<queue>
#define MAXLEN 100
using namespace std;
typedef char DataType;
bool visited[MAXLEN];
typedef struct EdgeNode { //边结点
int adjvex; //邻接点在顶点数组中的下标
struct EdgeNode* next;//链域 指向下一个邻接点
}EdgeNode;
typedef struct VertexNode { //头结点
DataType data; //顶点信息
EdgeNode* link; //边表头指针(指向第一条依附于该顶点的弧的指针)
}VertexNode;
typedef struct Graph {
VertexNode adjList[MAXLEN];
int numVertexes, numEdges; //图中当前的结点数及边数
}Graph;
void CreateGraph(Graph* G) //建立无向图的邻接表
{
cout << "输入图的顶点数:" << endl;
cin >> G->numVertexes;
cout << "输入图的边数:" << endl;
cin >> G->numEdges;
int i, j, k;
cout << "输入各个顶点的数据:" << endl;
for (i = 1;i <= G->numVertexes;i++)
{
cout << "顶点" << i << ":" << endl;
cin >> G->adjList[i].data;
G->adjList[i].link = NULL;
}
for (k = 1;k <= G->numEdges;k++)
{
cout << "输入(vi,vj)上的顶点序号:" << endl;
cin >> i >> j;
EdgeNode* t;
EdgeNode* p = new EdgeNode;
if (G->adjList[i].link != NULL)
{
t = G->adjList[i].link;
while (t->next != NULL)
t = t->next;
p->adjvex = j; p->next = NULL; t->next = p;
}
else
{
p->adjvex = j; p->next = G->adjList[i].link; G->adjList[i].link = p;
}
p = new EdgeNode;
if (G->adjList[j].link != NULL)
{
t = G->adjList[j].link;
while (t->next != NULL)
t = t->next;
p->adjvex = i;p->next = NULL;t->next = p;
}
else
{
p->adjvex = i; p->next = G->adjList[j].link; G->adjList[j].link = p;
}
}
}
//广度优先遍历算法
void BFSTraverse(Graph* G)
{
cout << "广度优先遍历的结果为:" << endl;
queue<int>q;
int i;
for (i = 1;i <= G->numVertexes;i++)
visited[i] = false;
for (i = 1;i <= G->numVertexes;i++)
{
if (!visited[i])
{
visited[i] = true;
cout << G->adjList[i].data;
q.push(i);
while (!q.empty())
{
EdgeNode* p = G->adjList[q.front()].link;
q.pop();
while (p != NULL)
{
if (visited[p->adjvex] == false)
{
visited[p->adjvex] = true;
cout << G->adjList[p->adjvex].data;
q.push(p->adjvex);
}
p = p->next;
}
}
}
}
cout << endl;
}
//深度优先遍历算法
void DFS(Graph* G, int i)
{
visited[i] = true;
cout << G->adjList[i].data;
EdgeNode* p = G->adjList[i].link;
while (p)
{
if (!visited[p->adjvex])
DFS(G, p->adjvex);
p = p->next;
}
}
void DFSTraverse(Graph* G)
{
cout << "深度优先遍历的结果为:" << endl;
int i;
for (i = 1;i <= G->numVertexes;i++)
visited[i] = false; //初始化访问数组visited的元素值为false
for (i = 1;i <= G->numVertexes;i++)
if (!visited[i]) //结点尚未访问
{
DFS(G, i);
}
cout << endl;
}
void main()
{
Graph G;
CreateGraph(&G);
DFSTraverse(&G);
BFSTraverse(&G);
}
输出数据:
深度优先序列: 1→2→4→8→5→3→6→7
广度优先序列: 1→2→3→4→5→6→7→8














 9225
9225











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









