







Motivation&Contribution
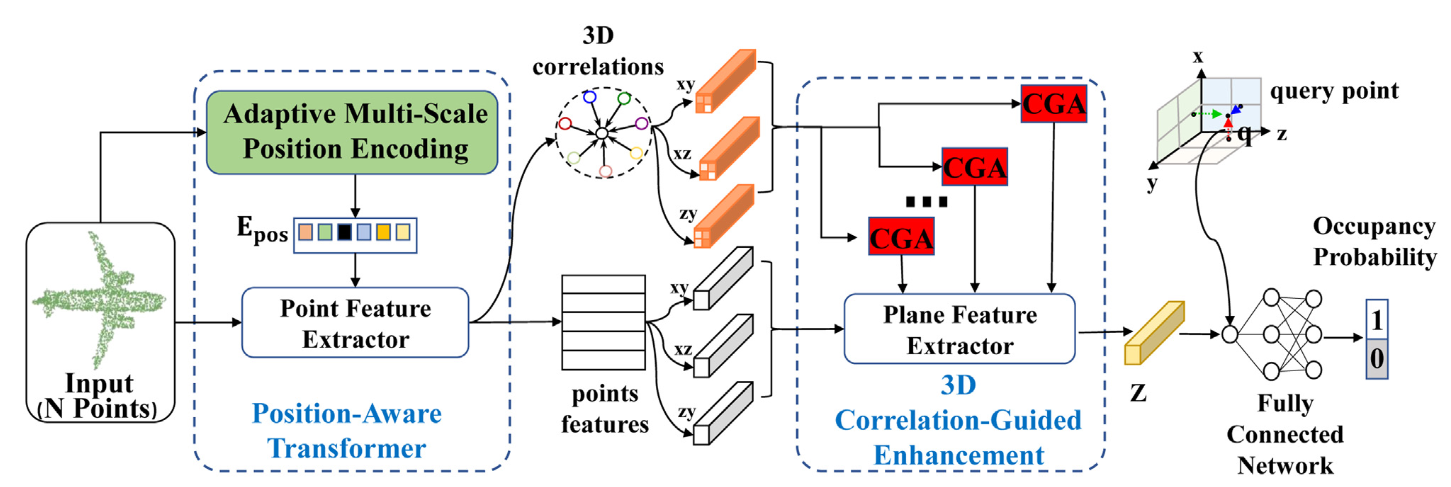
如何更好地表示ConvONet的3D特征仍然是一个悬而未决的问题。我们提出通过增强3D位置信息和3D-2D相关性来改进ConvONet的表示。我们提出了一种位置感知转换器(PAT)架构,该架构将自适应多尺度位置编码(AMSPE)集成到自注意计算中,通过以多层次的方式利用全局和局部位置聚合来增强3D位置信息,同时,由于将3D特征投影到2D平面进行卷积,不可避免地会引入模糊或噪声表示。我们提出了一个3D相关引导增强(CGE)网络来弥合3D和2D形状表示之间的差距。具体来说,我们利用PAT投影的3D相关性作为结构指导,然后计算3D相关性引导注意(CGAs)来增强2D空间中最具代表性的特征
Method
模型概览
具有自适应多尺度位置编码的位置感知Transformer
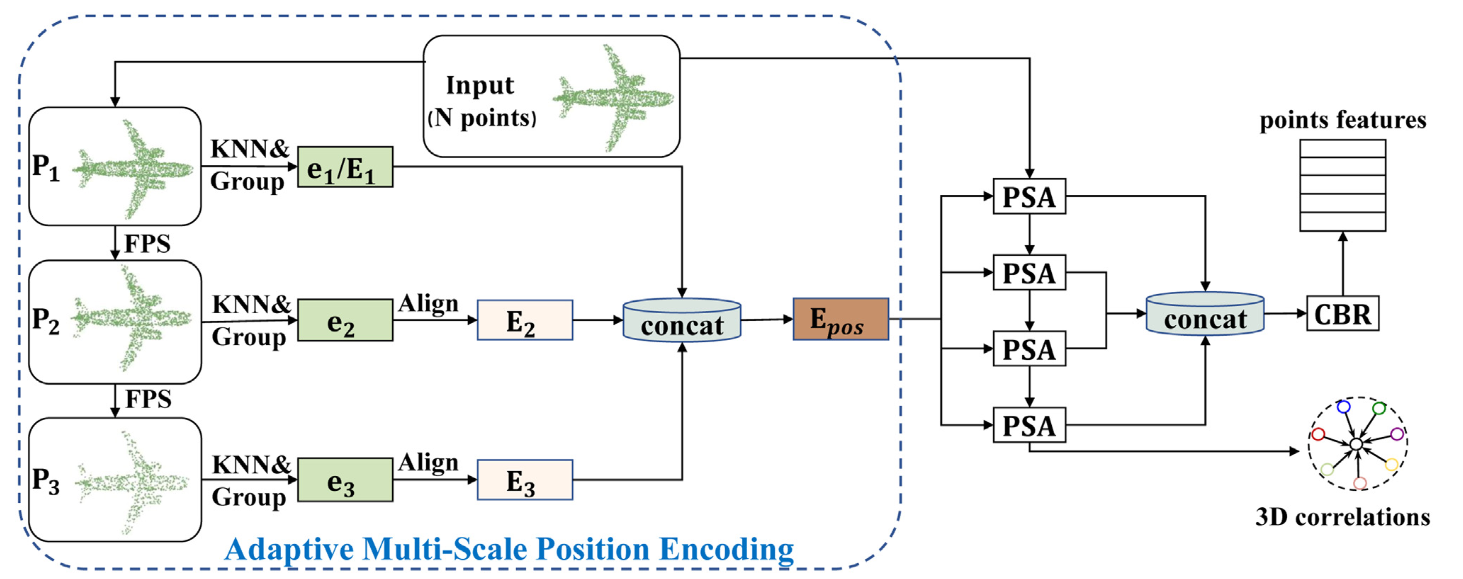
我们将输入点云P发送给PAT, PAT通过几个自注意模块学习点之间的相关性。考虑到位置编码(PE)的重要性,提出了一种自适应多尺度位置编码(AMSPE)模块,对位置信息进行多级编码。我们首先用最远点抽样算法(farthest point sampling algorithm, FPS)对不同的水平点集进行抽样。接下来,对每个点集层,通过K近邻算法(K-Nearest Neighbors,KNN)、Group和Align提取局部信息,得到融合特征Epos作为位置编码。具体来说,我们对点云进行MLP处理,利用K邻近算法收集每个点上k个相邻点的特征,得到多层次的局部位置特征ei。为了融合不同级别的局部特征表示ei,我们建议对级别i∈{2,3}插值ei,使它们的特征数和位置与e1一致。最后,将各层Ei的对齐特征融合为自注意模块的位置编码Epos。在得到位置编码的Epos后,将点云和Epos输入到点自注意(Point Self-Attention,PSA)模块中。我们通过堆叠4个PSA模块来构建位置感知Transformer(PAT)。CBR表示Convolution-BatchNorm-ReLu操作。
3D相关引导增强网络
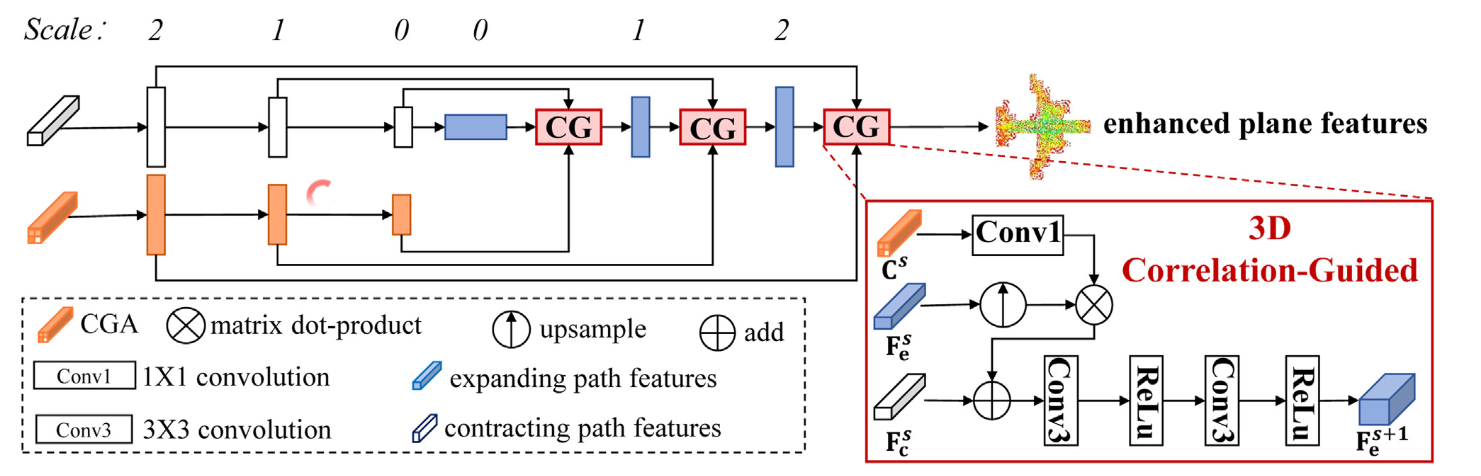
为了利用二维卷积的平移不变性,我们通过正交投影和双线性插值(orthogonal projection and bilinear interpolation,OPBI)从处理后的点云中获得分辨率为r的三个平面特征(Fx, Fy, Fz)。 然后利用具有共享参数的U-Net[8]提取平面特征。在我们的PAT模块中,每一次自注意不仅增强了点云的表示,而且还通过函数学习了点云内部的相关性,因此,我们通过注意地图学习三维相关引导注意(3D Correlation-Guided Attentions,CGAs)来增强投影的二维特征表示。我们使用PAT最后一次自注意产生的A4作为三维相关性的指导。
评价指标
交叉联合(Intersection over Union, IoU) :测量预测形状的体积与地面真相
的体积之间的交叉比(越高越好)
Chamfer-L1距离:计算预测点云与地面真相点云之间最近点的距离(越低越好)

法向量一致:评估3D网格表面的特征损失(越高越好)

F-score:计算正确率和召回率的谐波平均值(越高越好)

















 4426
4426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









