






一、边缘检测的一般步骤
1、滤波
边缘检测算法主要用到了图像强度的一阶和二阶导数,导数对噪声比较敏感。图像边缘信息和噪声都集中在高频段,要想更好地检测边缘就要去除高频段的噪声,可以采用高斯平滑滤波器卷积降噪。
2、增强
增强算法可以将图像灰度点领域强度值有显著变化的点凸显出来。具体编程实现时,可通过计算梯度幅值来确定。
3、检测
一般增强后的图像,邻域中会有很多点的梯度值比较大。可以采用阈值化方法进行检测。
二、边缘检测的实现
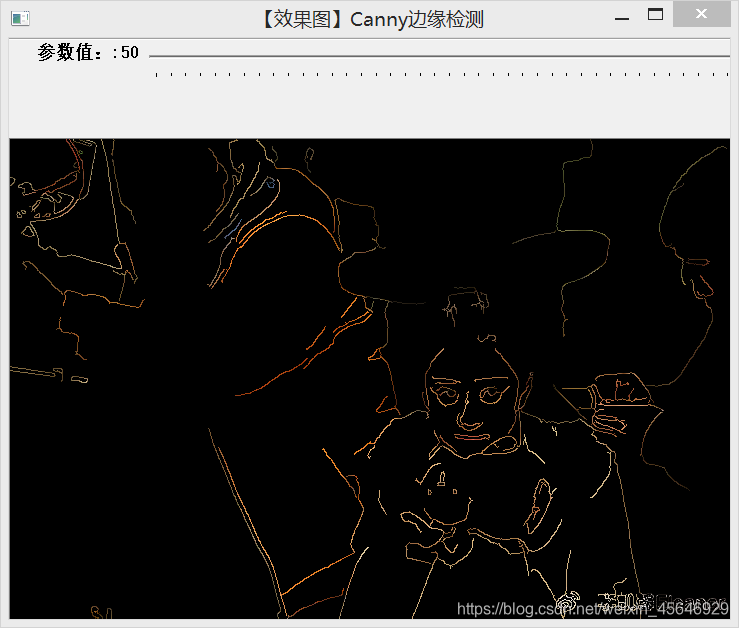
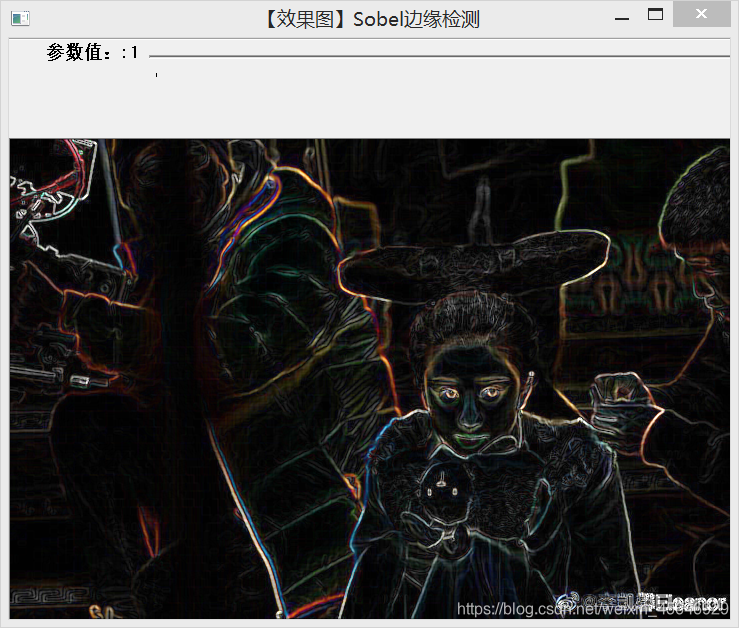
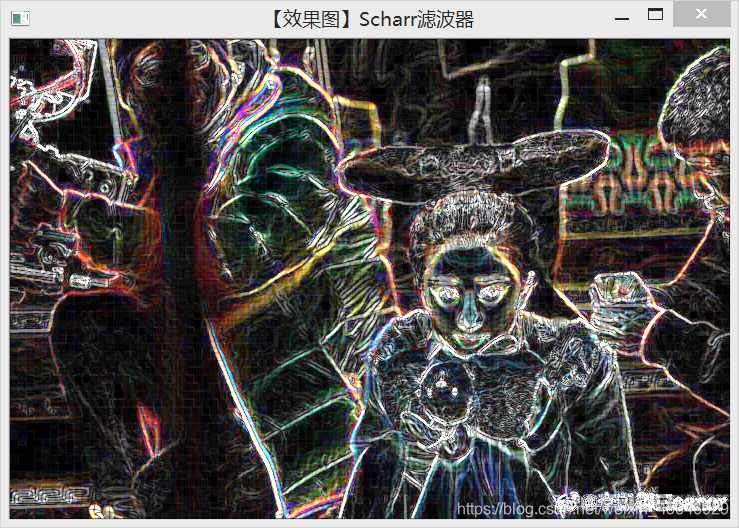
包括Canny算子、Sobel算子、Scharr滤波器的代码,通过主函数main对on_Canny、on_Sobel和Scharr三个子函数的调用实现。
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
using namespace cv;
//原图,原图的灰度版,目标图
Mat g_srcImage, g_srcGrayImage,g_dstImage;
//Canny边缘检测相关变量
Mat g_cannyDetectedEdges;
int g_cannyLowThreshold=1;//TrackBar位置参数
//Sobel边缘检测相关变量
Mat g_sobelGradient_X, g_sobelGradient_Y;
Mat g_sobelAbsGradient_X, g_sobelAbsGradient_Y;
int g_sobelKernelSize=1;//TrackBar位置参数
//Scharr滤波器相关变量
Mat g_scharrGradient_X, g_scharrGradient_Y;
Mat g_scharrAbsGradient_X, g_scharrAbsGradient_Y;
static void on_Canny(int, void*);//Canny边缘检测窗口滚动条的回调函数
static void on_Sobel(int, void*);//Sobel边缘检测窗口滚动条的回调函数
void Scharr( );//封装了Scharr边缘检测相关代码的函数
int main( int argc, char** argv )
{
//载入原图
g_srcImage = imread("李凱馨Eleanor.jpg");
if( !g_srcImage.data ) { printf("Oh,no,读取srcImage错误~! \n"); return false; }
//显示原始图
namedWindow("【原始图】");
imshow("【原始图】", g_srcImage);
// 创建与src同类型和大小的矩阵(dst)
g_dstImage.create( g_srcImage.size(), g_srcImage.type() );
// 将原图像转换为灰度图像
cvtColor( g_srcImage, g_srcGrayImage, CV_BGR2GRAY );
// 创建显示窗口
namedWindow( "【效果图】Canny边缘检测", CV_WINDOW_AUTOSIZE );
namedWindow( "【效果图】Sobel边缘检测", CV_WINDOW_AUTOSIZE );
// 创建trackbar
createTrackbar( "参数值:", "【效果图】Canny边缘检测", &g_cannyLowThreshold, 120, on_Canny );
createTrackbar( "参数值:", "【效果图】Sobel边缘检测", &g_sobelKernelSize, 3, on_Sobel );
// 调用回调函数
on_Canny(0, 0);
on_Sobel(0, 0);
//调用封装了Scharr边缘检测代码的函数
Scharr( );
//轮询获取按键信息,若按下Q,程序退出
while((char(waitKey(1)) != 'q')) {}
return 0;
}
void on_Canny(int, void*)
{
// 先使用 3x3内核来降噪
blur( g_srcGrayImage, g_cannyDetectedEdges, Size(3,3) );
// 运行我们的Canny算子
Canny( g_cannyDetectedEdges, g_cannyDetectedEdges, g_cannyLowThreshold, g_cannyLowThreshold*3, 3 );
//先将g_dstImage内的所有元素设置为0
g_dstImage = Scalar::all(0);
//使用Canny算子输出的边缘图g_cannyDetectedEdges作为掩码,来将原图g_srcImage拷到目标图g_dstImage中
g_srcImage.copyTo( g_dstImage, g_cannyDetectedEdges);
//显示效果图
imshow( "【效果图】Canny边缘检测", g_dstImage );
}
void on_Sobel(int, void*)
{
// 求 X方向梯度
Sobel( g_srcImage, g_sobelGradient_X, CV_16S, 1, 0, (2*g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT );
convertScaleAbs( g_sobelGradient_X, g_sobelAbsGradient_X );//计算绝对值,并将结果转换成8位
// 求Y方向梯度
Sobel( g_srcImage, g_sobelGradient_Y, CV_16S, 0, 1, (2*g_sobelKernelSize+1), 1, 1, BORDER_DEFAULT );
convertScaleAbs( g_sobelGradient_Y, g_sobelAbsGradient_Y );//计算绝对值,并将结果转换成8位
// 合并梯度
addWeighted( g_sobelAbsGradient_X, 0.5, g_sobelAbsGradient_Y, 0.5, 0, g_dstImage );
//显示效果图
imshow("【效果图】Sobel边缘检测", g_dstImage);
}
void Scharr( )
{
// 求 X方向梯度
Scharr( g_srcImage, g_scharrGradient_X, CV_16S, 1, 0, 1, 0, BORDER_DEFAULT );
convertScaleAbs( g_scharrGradient_X, g_scharrAbsGradient_X );//计算绝对值,并将结果转换成8位
// 求Y方向梯度
Scharr( g_srcImage, g_scharrGradient_Y, CV_16S, 0, 1, 1, 0, BORDER_DEFAULT );
convertScaleAbs( g_scharrGradient_Y, g_scharrAbsGradient_Y );//计算绝对值,并将结果转换成8位
// 合并梯度
addWeighted( g_scharrAbsGradient_X, 0.5, g_scharrAbsGradient_Y, 0.5, 0, g_dstImage );
//显示效果图
imshow("【效果图】Scharr滤波器", g_dstImage);
}
三、运行结果
















 1779
1779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









