







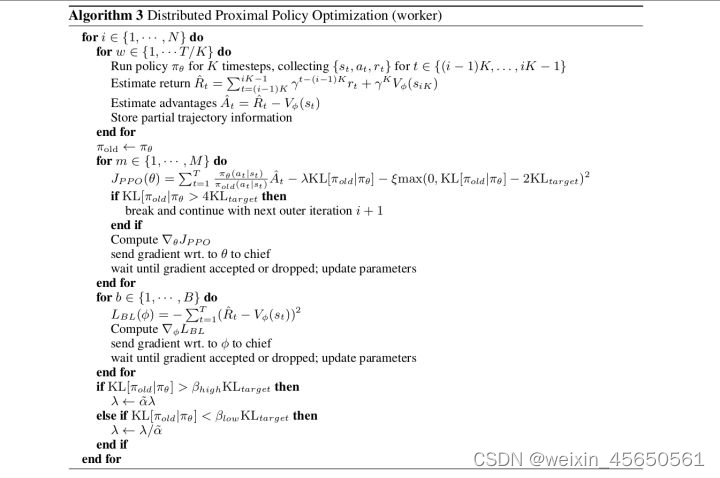
一、ppo伪代码
二、ppo算法整个过程的理解
适用于连续动作空间的一种算法!
(1)首先,存储(s、a、r),计算折扣奖励以及优势函数
buffer_s.append(s) buffer_a.append(a) buffer_r.append®,即可将强化学习的经验存储起来,当存储量达到一个batch后,计算buffer里面的折扣奖励及优势函数,然后将buffer_s、buffer_a、buffer_r清零置空。下一步将更新actor网络和critic网络。
折扣奖励公式为:
R
t
=
∑
t
′
>
t
t
′
=
n
−
1
γ
t
′
−
t
r
t
′
+
γ
n
−
t
V
ϕ
(
s
n
)
R_{t}=\sum_{t^{'}>t}^{t^{'}=n-1}{\gamma^{t^{'}-t}r_{t^{'}}}+\gamma^{n-t}V_{\phi}(s_{n})
Rt=∑t′>tt′=n−1γt′−trt′+γn−tVϕ(sn)
=
r
t
+
γ
∗
r
t
+
1
+
γ
2
∗
r
t
+
2
+
.
.
.
+
γ
n
−
t
−
1
∗
r
n
−
1
+
γ
n
−
t
∗
V
ϕ
(
s
n
)
=r_{t}+\gamma*r_{t+1}+\gamma^{2}*r_{t+2}+...+\gamma^{n-t-1}*r_{n-1}+\gamma^{n-t}*V_{\phi}(s_{n})
=rt+γ∗rt+1+γ2∗rt+2+...+γn−t−1∗rn−1+γn−t∗Vϕ(sn)
其中
V
ϕ
(
s
n
)
V_{\phi}(s_{n})
Vϕ(sn)通过critic网络得到,输入状态 sn 得到值函数
V
ϕ
(
s
t
)
V_{\phi}(s_{t})
Vϕ(st) 。
优势函数为:
A
t
=
R
t
−
V
ϕ
(
s
t
)
A_{t}=R_{t}-V_{\phi}(s_{t})
At=Rt−Vϕ(st)
其中
V
ϕ
(
s
t
)
V_{\phi}(s_{t})
Vϕ(st)通过critic网络得到,输入状态 st 得到值函数
V
ϕ
(
s
t
)
V_{\phi}(s_{t})
Vϕ(st) 。
(2)更新actor网络
actor网络有一个新actor网路和旧actor网络,其中新actor网络在更新的时候是一直都在更新,而旧actor网络是在新actor网络更新一定次数后,由新actor网络的参数赋值。
新actor网络更新:(有两种更新方式)
1)一种为:
a
l
o
s
s
=
−
∑
t
−
1
T
π
n
e
w
(
a
t
∣
s
t
)
π
o
l
d
(
a
t
∣
s
t
)
A
t
−
λ
∗
K
L
(
π
o
l
d
∣
π
n
e
w
)
aloss=-\sum_{t-1}^{T}{\frac{\pi_{new}(a_{t}|s_{t})}{\pi_{old}(a_{t}|s_{t})}A_{t}}-\lambda*KL(\pi_{old}|\pi_{new})
aloss=−∑t−1Tπold(at∣st)πnew(at∣st)At−λ∗KL(πold∣πnew)
K
L
(
π
o
l
d
∣
π
n
e
w
)
>
4
K
L
t
e
a
r
g
e
t
KL(\pi_{old}|\pi_{new})>4KL_{tearget}
KL(πold∣πnew)>4KLtearget时,break,退出更新循环,进入下一次迭代episode。
2)第二种为:
a
l
o
s
s
=
−
∑
a
b
m
i
n
(
π
n
e
w
(
a
t
∣
s
t
)
π
o
l
d
(
a
t
∣
s
t
)
A
t
,
c
l
i
p
(
π
n
e
w
(
a
t
∣
s
t
)
π
o
l
d
(
a
t
∣
s
t
)
,
1
−
ϵ
,
1
+
ϵ
)
A
t
)
aloss=-\sum_{a}^{b}{min( \frac{\pi_{new}(a_{t}|s_{t})}{\pi_{old}(a_{t}|s_{t})}A_{t},clip(\frac{\pi_{new}(a_{t}|s_{t})}{\pi_{old}(a_{t}|s_{t})} ,1-\epsilon,1+\epsilon)A_{t} })
aloss=−∑abmin(πold(at∣st)πnew(at∣st)At,clip(πold(at∣st)πnew(at∣st),1−ϵ,1+ϵ)At)
根据得到的损失函数,进行梯度更新(进行训练,使得损失函数越来越小)。
(3)更新critic网络
c
l
o
s
s
=
∑
t
=
1
T
[
R
t
−
V
ϕ
(
s
t
)
]
2
closs=\sum_{t=1}^{T}[R_{t}-V_{\phi}(s_{t})]^2
closs=∑t=1T[Rt−Vϕ(st)]2
根据损失函数,进行梯度更新
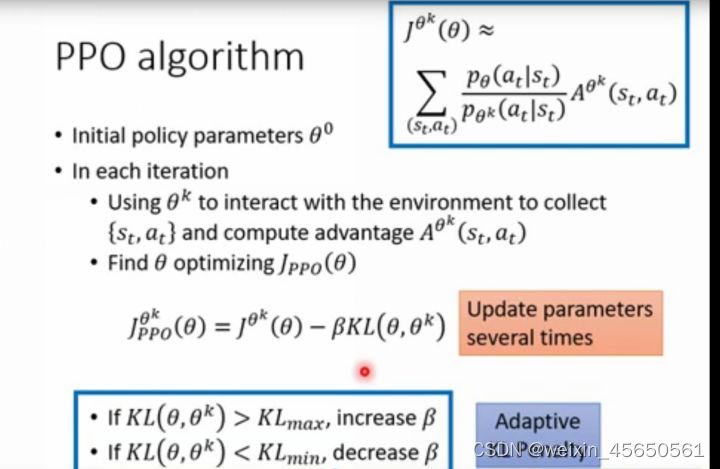
(4)要根据不同的KL散度的范围对参数 λ 进行更改:
K
L
(
π
o
l
d
∣
π
n
e
w
)
>
β
h
i
g
h
K
L
t
a
r
g
e
t
时,
λ
=
α
∗
λ
(
α
>
1
)
KL(\pi_{old}|\pi_{new})>\beta_{high}KL_{target}时,\lambda=\alpha*\lambda(\alpha>1)
KL(πold∣πnew)>βhighKLtarget时,λ=α∗λ(α>1)
K
L
(
π
o
l
d
∣
π
n
e
w
)
<
β
l
o
w
K
L
t
a
r
g
e
t
时,
λ
=
λ
/
α
(
α
>
1
)
KL(\pi_{old}|\pi_{new})<\beta_{low}KL_{target}时,\lambda=\lambda/\alpha(\alpha>1)
KL(πold∣πnew)<βlowKLtarget时,λ=λ/α(α>1)
这就是一次episode的全部运行过程,结束后进入到下一个episode,继续训练。
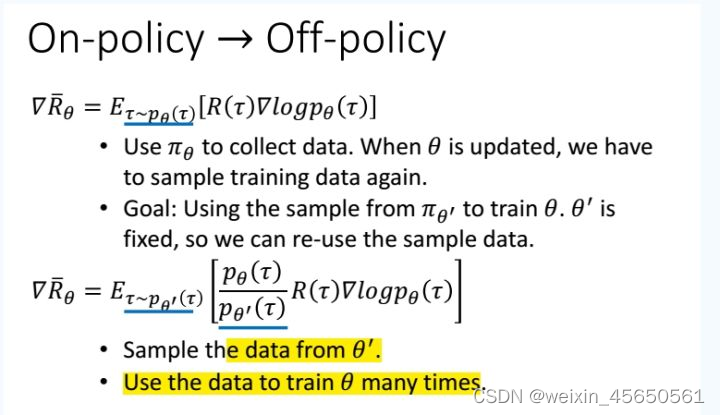
三、on-policy与off-policy
on-policy:我们想要训练的agent与环境进行交互的agent是同一个agent。
off-policy:想要训练的agent与环境进行交互的不是同一个agent。
(李宏毅老师的DRL课程讲的是off-policy,论文里写的都是on-policy)
在强化学习中,为什么TRPO和PPO算法属于On-Policy的算法?
从策略 θ′ 中训练,将数据保存在buffer中,从buffer中抽取随机抽取数据更新策略 θ ,与环境交互的agent与学习更新的agent不是同一个,故认为是off-policy。
policy gradient:on-policy。
四、细节
ppo使用了important sampling方法,p(x)与q(x)应该相差不大。
五、ppo代码
六、与A3C区别
A3C将Gradient 给Global net
ppo将采集到的数据给Global ppo















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









