get_domain 返回所有输入图像的定义域作为一个区域
Halcon 中的区域
get_domain(Image : Domain : : )
Image : 图像 (input_object): 类型可以是 (多通道-) 图像数组,对象类型为字节、方向、循环、int1、int2、uint2、int4、int8、实数、复数或矢量场。
这是输入图像。
Domain : 域 (output_object): 类型是区域数组,对象类型。
这是输入图像的定义域。
add_channels 给区域增加灰度值
add_channels(Regions, Image : GrayRegions : : )
region(-array) → object: 这个参数是指输入的区域,通常是一个数组,描述了图像中的某些区域,但不包含像素值。
Image (input_object) (multichannel-)image → object: 这个参数是指包含像素值的输入图像,可能是多通道图像。
GrayRegions (output_object) image(-array) → object: 这个参数表示输出的图像或图像数组,其中包含了具有像素值的区域,每个输入区域对应一个输出图像。
find_shape_model 发现匹配模板
find_shape_model(Image : :
ModelID,
AngleStart,
AngleExtent,
MinScore,
NumMatches,
MaxOverlap,
SubPixel,
NumLevels,
Greediness :
Row,Column, Angle, Score)
find_shape_models 发现最佳模板
find_shape_models(Image : : ModelIDs, AngleStart, AngleExtent, MinScore, NumMatches, MaxOverlap, SubPixel, NumLevels, Greediness : Row, Column, Angle, Score, Model)
Image (input_object):这个参数表示输入图像数据,这可能是多通道图像数组,用于在其中找到模型。
ModelIDs (input_control):这是模板或模型的ID数组,用于指定哪一个或多个模型将在图像中寻找。
AngleStart (input_control):指定模型可能的最小旋转角度,单位是弧度。例如,-0.39弧度表示模型可能有一些初始旋转。
AngleExtent (input_control):模型的旋转角度范围,单位为弧度。例如,0.79弧度表示可以允许模型在指定角度范围内旋转。
MinScore (input_control):找到模型实例的最小评分标准。0到1之间的值,表示匹配得分的下限。
NumMatches (input_control):要找到的模型实例的数量。如果为0,表示找出所有匹配的实例。
MaxOverlap (input_control):指定模型实例之间的最大重叠程度。值在0到1之间,表示允许多大程度的重叠。
SubPixel (input_control):选择是否使用子像素精度进行计算。如果不等于 'none',表示使用特定的子像素方法。
NumLevels (input_control):用于匹配时的金字塔层级数量。更多的层级可能提供更快的匹配,但可能牺牲准确性。
Greediness (input_control):搜索算法的“贪心度”。0表示安全但慢,1表示快速但可能错过匹配。值在0到1之间。
Row (output_control)、Column (output_control):找到的模型实例的行坐标和列坐标。
Angle (output_control):找到的模型实例的旋转角度。
Score (output_control):找到的模型实例的匹配得分。
Model (output_control):找到的模型实例的索引。
示例
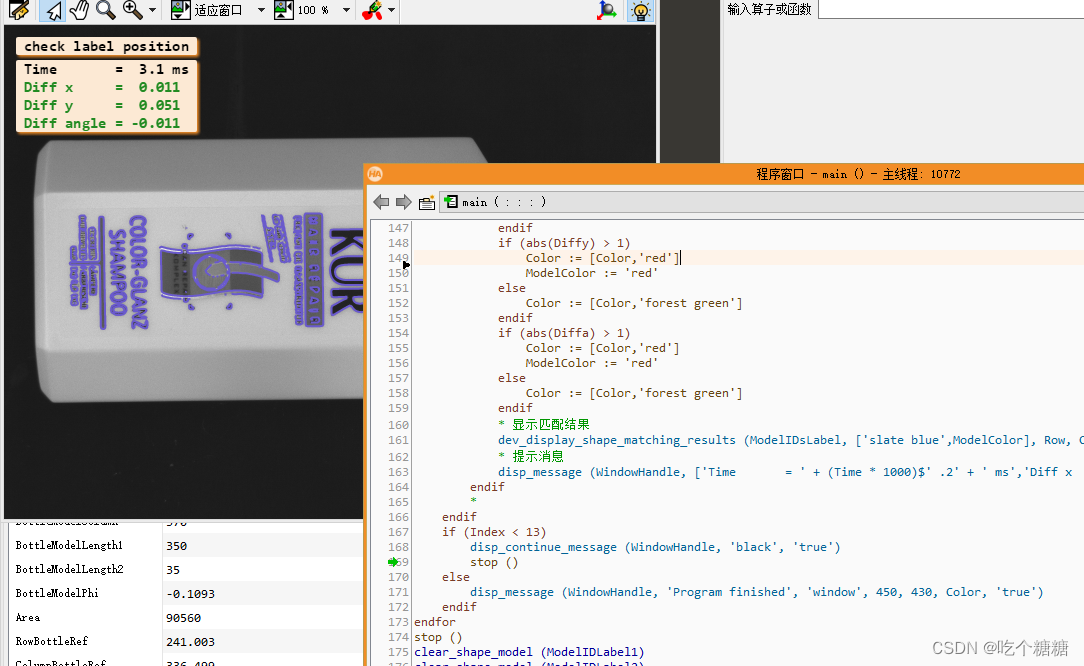
* This example program checks the right position of a label on
* a shampoo bottle.
* First, two shape models for the bottle and the label are created.
* Then, the models are searched in a sequence of images,
* and it is checked, if their relative position is within the
* specified tolerances.
*
* init visualization
dev_update_off ()
dev_set_draw ('margin')
dev_set_line_width (2)
*
* load reference image for model preparation
* 0.读取图片
set_system ('clip_region', 'false')
read_image (Image, 'packaging/shampoo_01')
dev_close_window ()
dev_open_window_fit_image (Image, 0, 0, -1, -1, WindowHandle)
set_display_font (WindowHandle, 14, 'mono', 'true', 'false')
dev_display (Image)
*
* prepare the shape model for matching
*
* generate first model region and search ROI
* 1.产生第一个感兴趣的区域
BottleModelRow := 131
BottleModelColumn := 370
BottleModelLength1 := 350
BottleModelLength2 := 35
BottleModelPhi := -0.1093
* 绘制矩形
gen_rectangle2 (Rectangle1, BottleModelRow, BottleModelColumn, BottleModelPhi, BottleModelLength1, BottleModelLength2)
gen_rectangle2 (Rectangle2, BottleModelRow + 220, BottleModelColumn, -BottleModelPhi, BottleModelLength1, BottleModelLength2)
* 将矩形联合
union2 (Rectangle1, Rectangle2, TemplateBottleRegion)
* 获取整个图像的区域
get_domain (Image, Domain)
* 计算区域的交集
intersection (TemplateBottleRegion, Domain, TemplateBottleRegion)
* 获取相交的中心点区域和坐标
area_center (TemplateBottleRegion, Area, RowBottleRef, ColumnBottleRef)
* 产生一个圆
gen_circle (SearchROIBottle, RowBottleRef, ColumnBottleRef, 40)
* 将感兴趣的区域裁剪
reduce_domain (Image, TemplateBottleRegion, ImageReduced)
*
* create shape model
* 2.创建形状匹配模型 ModelIDBottle
create_shape_model (ImageReduced, 5, -rad(3), rad(6), 0, 'auto', 'use_polarity', 25, 3, ModelIDBottle)
*
* display shape model
dev_display (Image)
dev_set_color ('forest green')
dev_display (TemplateBottleRegion)
dev_set_color ('slate blue')
disp_message (WindowHandle, 'bottle shape model', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* generate second model region and search ROI
* 3.产生第二个感兴趣的区域
LabelRow1 := 180
LabelRow2 := 310
LabelColumn1 := 50
LabelColumn2 := 470
* 产生一个矩形
gen_rectangle1 (TemplateLabelRegion, LabelRow1, LabelColumn1, LabelRow2, LabelColumn2)
* 获取区域的中心点以及坐标
area_center (TemplateLabelRegion, Area1, RowLabelRef, ColumnLabelRef)
* 产生一个圆
gen_circle (SearchROILabel, RowLabelRef, ColumnLabelRef, 60)
* 将感兴趣的区域裁剪
reduce_domain (Image, TemplateLabelRegion, ImageReduced)
* 4.检查已创建的形状模型并获得其属性信息
inspect_shape_model (ImageReduced, ModelImages, ModelRegions, 1, 25)
*
* create shape model
* 创建模板 ModelIDLabel1
create_shape_model (ImageReduced, 5, rad(-3), rad(6), 0, 'auto', 'use_polarity', 25, 5, ModelIDLabel1)
* 将匹配模板选择180度创建模板 ModelIDLabel2
create_shape_model (ImageReduced, 5, rad(180 - 3), rad(6), 0, 'auto', 'use_polarity', 25, 5, ModelIDLabel2)
ModelIDsLabel := [ModelIDLabel1,ModelIDLabel2]
*
* display label model
dev_display (Image)
dev_set_color ('forest green')
dev_display (TemplateLabelRegion)
dev_set_color ('slate blue')
dev_display (ModelRegions)
disp_message (WindowHandle, 'create label shape model', 'window', 12, 12, 'black', 'true')
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
*
* MainLoop
*
* check relative positions of label and bottle in all images
* 5.检测位置
for Index := 1 to 13 by 1
read_image (Image, 'packaging/shampoo_' + Index$'.2')
dev_display (Image)
disp_message (WindowHandle, 'check label position', 'window', 12, 12, 'black', 'true')
count_seconds (s1)
* 裁剪第一次的搜索圆
reduce_domain (Image, SearchROIBottle, ImageReduced)
* 通过ModelIDBottle寻找搜索圆,获取ScoreBottle
find_shape_model (ImageReduced, ModelIDBottle, -rad(3), rad(6), 0.7, 1, 0.5, 'least_squares', 0, 0.9, RowBottle, ColumnBottle, AngleBottle, ScoreBottle)
* prepare search ROIs in search image
* 将两个搜索标记合并
concat_obj (SearchROILabel, SearchROILabel, SearchROIs)
add_channels (SearchROIs, Image, GrayRegions)
*
* search shape models
* 通过ModelIDsLabel 查找匹配模板获取Score得分,注意角度范围,并且获取FoundModel
find_shape_models (GrayRegions, ModelIDsLabel, [rad(-3),rad(180 - 3)], [rad(6),rad(6)], 0.6, 1, 1, 'interpolation', 0, 0.9, Row, Column, Angle, Score, FoundModel)
count_seconds (s2)
if (|Score| != 1 or |ScoreBottle| != 1)
disp_message (WindowHandle, 'Model not found', 'window', 40, 12, 'red', 'true')
else
* 如果模板
if (ModelIDsLabel[FoundModel] == ModelIDLabel2)
* 显示图标选择 180°
disp_message (WindowHandle, 'Label rotated by 180°', 'window', 40, 12, 'red', 'true')
else
* calculate y deviation
* 计算y的偏移量
Diffy := (RowBottle - Row) - (RowBottleRef - RowLabelRef)
* calculate x deviation
* 计算x的偏移量
Diffx := (ColumnBottle - Column) - (ColumnBottleRef - ColumnLabelRef)
*
* check the rotation angle of the bottle label
* 计算旋转角度
Diffa := deg(AngleBottle - Angle)
*
* calculate the time elapsed
Time := s2 - s1
*
* display results
* 显示结果
Color := 'black'
ModelColor := 'forest green'
if (abs(Diffx) > 3)
Color := [Color,'red']
ModelColor := 'red'
else
Color := [Color,'forest green']
endif
if (abs(Diffy) > 1)
Color := [Color,'red']
ModelColor := 'red'
else
Color := [Color,'forest green']
endif
if (abs(Diffa) > 1)
Color := [Color,'red']
ModelColor := 'red'
else
Color := [Color,'forest green']
endif
* 显示匹配结果
dev_display_shape_matching_results (ModelIDsLabel, ['slate blue',ModelColor], Row, Column, Angle, 1, 1, FoundModel)
* 提示消息
disp_message (WindowHandle, ['Time = ' + (Time * 1000)$' .2' + ' ms','Diff x = ' + Diffx$' .2','Diff y = ' + Diffy$' .2','Diff angle = ' + Diffa$' .2'], 'window', 35, 12, Color, 'true')
endif
*
endif
if (Index < 13)
disp_continue_message (WindowHandle, 'black', 'true')
stop ()
else
disp_message (WindowHandle, 'Program finished', 'window', 450, 430, Color, 'true')
endif
endfor
stop ()
clear_shape_model (ModelIDLabel1)
clear_shape_model (ModelIDLabel2)
clear_shape_model (ModelIDBottle)
set_system ('clip_region', 'true')








 这篇文章详细介绍了Halcon库中的几个关键功能,包括获取图像定义域、添加灰度通道、形状模型的搜索和匹配。通过实例展示了如何使用这些函数来检测和定位瓶子和标签在序列图像中的相对位置。
这篇文章详细介绍了Halcon库中的几个关键功能,包括获取图像定义域、添加灰度通道、形状模型的搜索和匹配。通过实例展示了如何使用这些函数来检测和定位瓶子和标签在序列图像中的相对位置。















 4199
4199











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









