







Cesium实战系列文章总目录:
传送门
1. 实现效果

2. 实现方法
运动模型的相机上帝视角跟随,即相机从较高的高度俯视,实时获取运动模型的位置,并更新相机的俯视位置即可。其中模型运动采用上篇博客内容:传送门
2.1 实现思路
(1)实时获取模型位置
通过上篇博客设置模型位置的参数进行获取,这里不过多赘述。
(2)实时更新相机位置
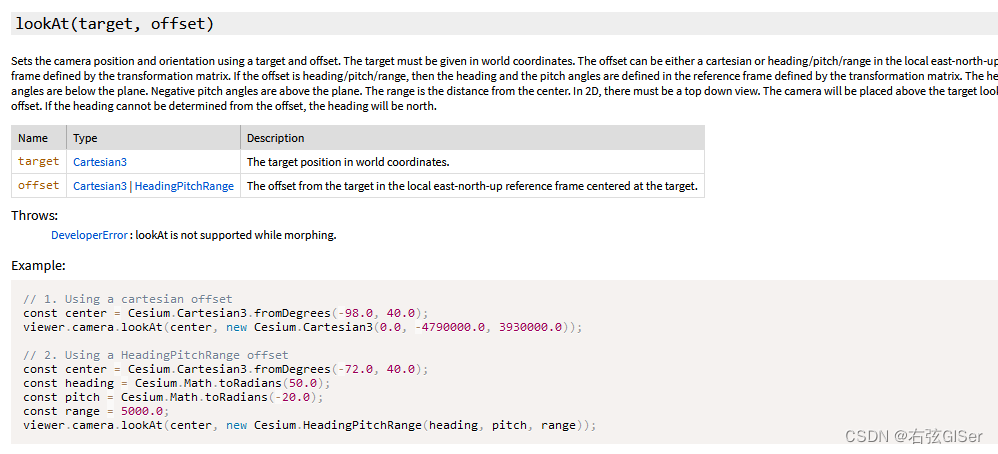
使用camera类的lookAt方法,API:传送门
target参数设置为模型位置,offset参数设置为Cartesian3的相机偏移量,由于上帝视角需要相机俯视,所以只需设置Cartesian3中的z值即可。
2.2 具体代码
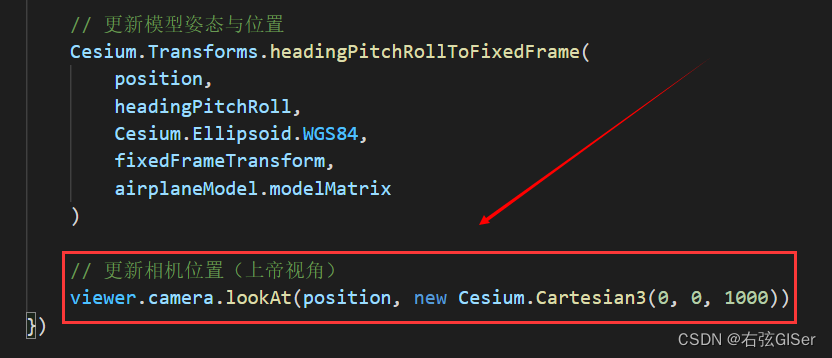
有关模型运行的代码参考上篇博客,这里仅展示设置上帝视角的代码:
// 更新相机位置(上帝视角)
viewer.camera.lookAt(position, new Cesium.Cartesian3(0, 0, 1000))
当模型姿态和位置更新后,再更新相机上帝视角的位置。



















 701
701

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











