







 本文详细介绍了英飞凌TC234单片机的各模块原理,包括SCU时钟分配、PORT&DIO、TOM定时器输出、ADC转换、DMA数据传输、SPI通信及TIM定时输入。特别强调了TOM模块中PWM的配置和工作原理,以及ADC的转换过程。此外,还提到了DMA的高效数据传输和SPI的通信细节。
本文详细介绍了英飞凌TC234单片机的各模块原理,包括SCU时钟分配、PORT&DIO、TOM定时器输出、ADC转换、DMA数据传输、SPI通信及TIM定时输入。特别强调了TOM模块中PWM的配置和工作原理,以及ADC的转换过程。此外,还提到了DMA的高效数据传输和SPI的通信细节。
英飞凌TC234各个模块的原理
目录
1.SCU时钟分配:晶振频率分频
2.PORT&DIO模块
3.TOM模块
4.ADC模块
5.DMA模块
6.SPI模块
7.ICU模块和TIM模块
注:本文是在EB配置过程中,结合芯片官方手册和网络资料,加上自己的理解后总结而成的。文章中部分模块的某些功能是作者实战过程中侧重于自己配置而选择的,望读者注意,如有不明白可私信我。
此外,本文章不是百分百的原创,存在少许引用CSDN平台上其它博客的句子,在此感谢这些博主无私分享!
晶振 :
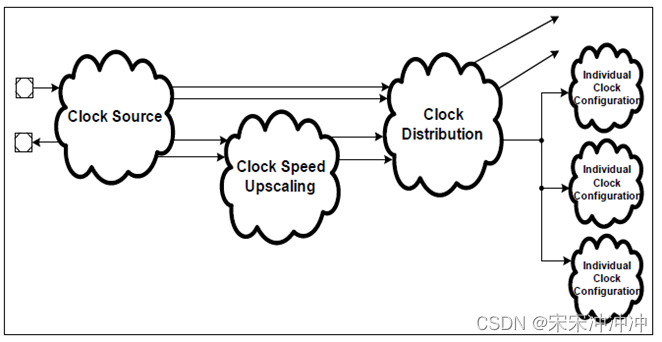
晶振频率经过分频和倍频得到不同的时钟频率提供给其它模块。
晶振配置到目标时钟要经过锁相环PLL升频和时钟控制单元CCU分频两步。
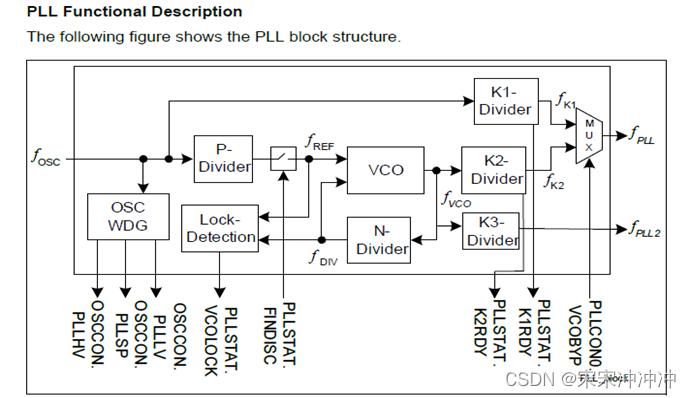
第一步是在锁相环中,输入为晶振频率,选择锁相环时钟模式(一共三种,本例选择正常模式),依次经过分频P,倍频N,分频k2/k3,经过选择器选择输出锁相环频率(原本能输出两个频率,本例只选泽输出fpll一个);第二步是经过CCU,通过设置分频比例(范围有限制),得到子时钟频率。
port&dio模块:
TC234具有数字通用输入/输出(GPIO)端口线它们连接到芯片上的外围设备。共有15组port,每个port又对应一定数量的pin引脚,其中仅pin40,pin41两组端口支持数字输入或模拟ADC输入。
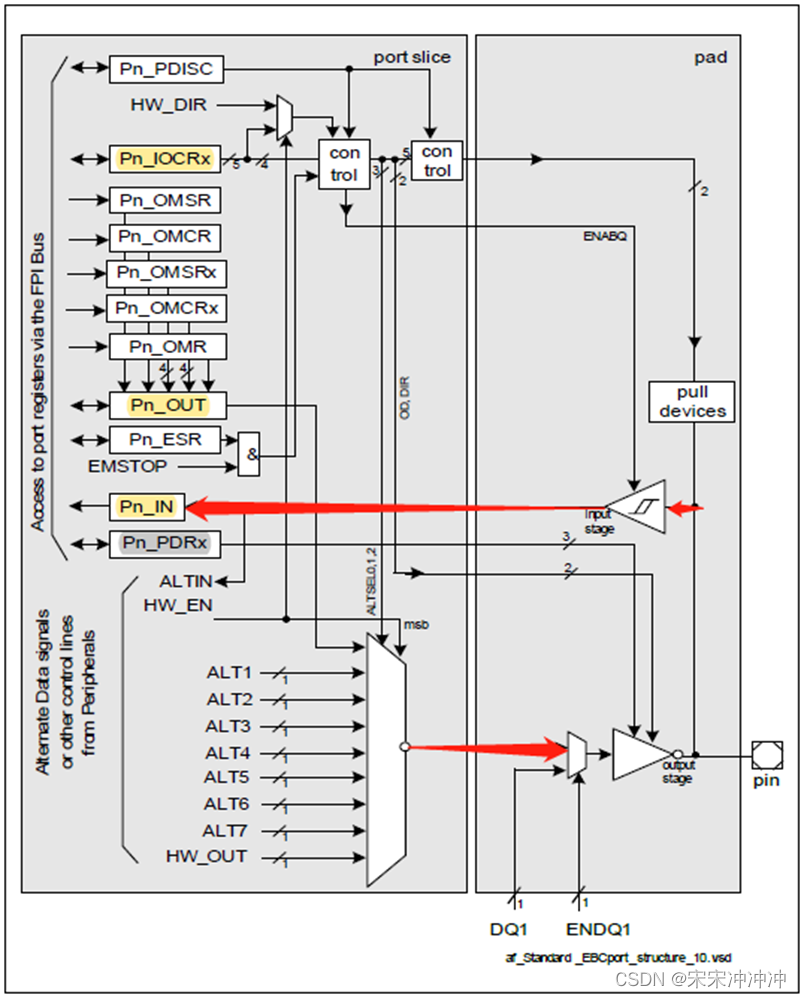
Port是配置了每一个引脚的功能状态,那么Dio更像是给每个引脚取一个名字,并给它们下发指令,比如让他们变成高电平或者低电平,或者翻转。每一个pin脚都能配置成输入或者输出。
在输入模式下,输出阻抗变高,pin脚的实际电压电平通过施密特触发装置转换为逻辑0或1,并可通过只读寄存器Pn_IN读取;在输出模式下,Pn_OUT输出数据寄存器写入,驱动器被激活并驱动通过多路复用器提供到端口引脚的值。如果片上外设单元(例如SPI,GTM,CCU,TOM)使用引脚输出信号,则可以通过多路复用器将备用输出线ALT1切换到ALT7到输出驱动器,还有一个通用接口GPIO口。能选择输出pin电平为高电平(3.3V)还是低电平。输出模式下,选择推挽输出。
GTM概述***********************************************************************************************************
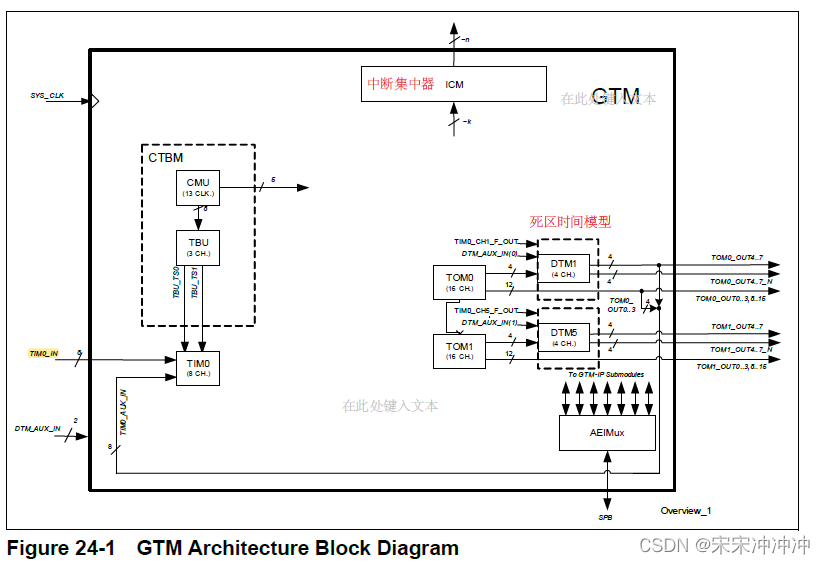
GTM中:
CMU(Clock Management Unit)和TBU(Time Base Unit)讨论基础架构组件,用于路由、时钟管理和通用时基功能。
TIM(Timer Input Module),TOM(Timer Output Module)描述了信号输入和输出模块。
DTM(Dead Time Module,死区)描述了无法有效测量和操作的时间段的模块。
ICM(Interrupt Concentrator Module)它捆绑了来自其他子模块的几个中断,将它们连接到外部世界。
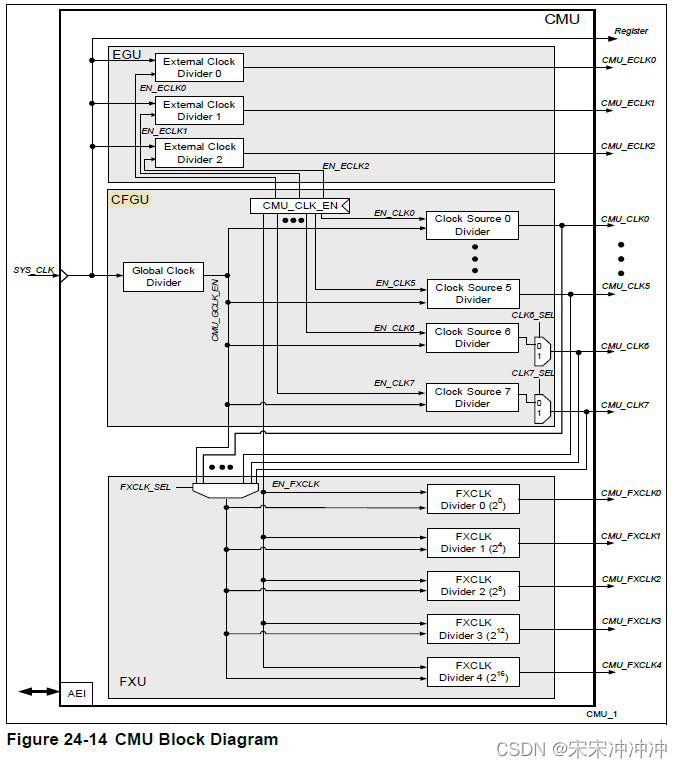
其中,CMU分为可配置时钟和固定分频时钟,这两个时钟分配给固定的模块。
可配置时钟为GTM子模块TIM和TUB提供了8个专用时钟源,这8个时钟的分频系数可以自定义。
固定时钟分频为TOM提供了预定义的5个不可配置时钟。这5个时钟的分频系数是固定的,选择分频系数0则除以1进行分频,选择分频系数1则以2的4次方进行分频…选择分频系数4则以系数2的16次方进行分频。
TOM模块(Timer Output Module定时器输出模块):
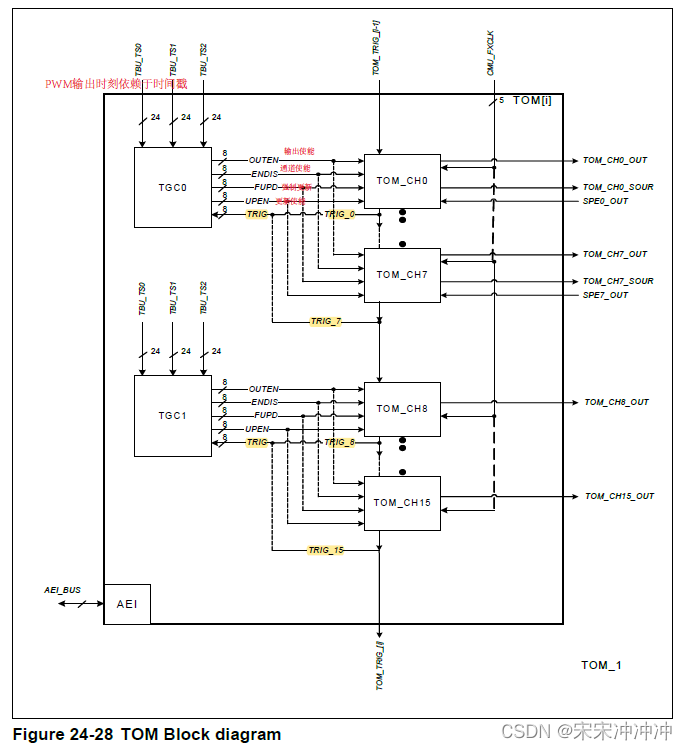
TOM提供了16个独立通道,是通道0到通道15,在每个输出引脚处生成简单的PWM(脉冲宽度调制,是英文Pulse Width Modulation信号)另外,在通道号15处可以产生脉冲计数调制信号(PCM)。
首先,选择时钟源,TOM时钟由固定分频时钟提供,此例选择全局时钟不分频。
其次,TOM分为全局通道控制器TGC和通道CH两部分。TGC0和TGC1是两个全局通道寄存器,TGC0控制0到7的通道,TGC1控制8到15的通道。16个通道控制输出PWM波形的占空比和周期。
TGC控制具体通道号的使能,输出使能,强制更新,控制三种触发源的触发。在本例中,选择通道1-6输出三组互补PWM波形。
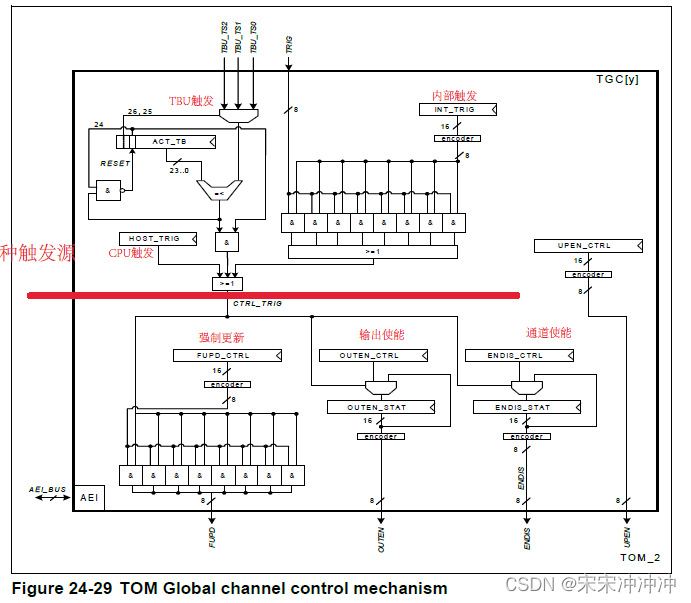
另外,通道0选择保存来自该通道的计数比较器CCU0(Counter Compare Unit)的触发输出,选择CN0=CM0时CN0复位。通道1-6选择此通道的触发输出将与前一个通道的触发输出相同(保证了6路PWM信号同步输出),选择上个通道触发来复位CN0(保证6路PWM信号的周期一致)。
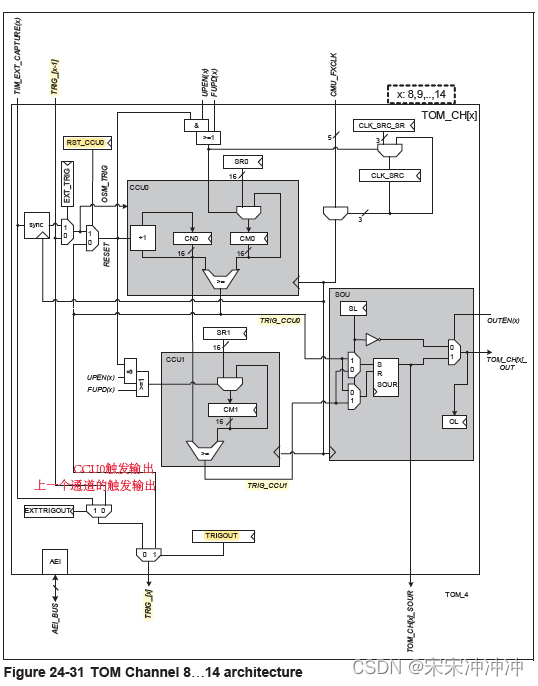
每个TOM通道包括一个计数器比较单元0 (CCU0),一个计数器比较单元1 (CCU1)和信号输出产生单元(SOU)。
CCUO中,CN0等于CM0时,CCU0触发SOU产生PWM信号。CCU1中,CN0等于CM1,则子单元CCU1触发SOU产生PWM信号。故CM0用来计数周期值,CM1用来计数占空比值。SOU中有一个RS触发器,其中Reset复位引脚与CM0相连用来复位,Set置位引脚与CM1相连用来设置占空比。当计数器CN0计数到CM1时,电平发生翻转并维持在该电平状态,计数器CN0继续计数直到等于CM0时,电平翻转并维持在该电平状态,CN0复位重新从0开始计数。实际占空比即为CM1/CM0。
本例中,GTM时钟源发出100,000,000hz的频率,PWM波目标频率为20,000hz,故需要将CM0设置成5000,即当计数器计数到5000时重置,此时PWM波频率为指定的20,000hz的频率。
补充:
同步更新:通过对影子SR1寄存器值更新,使得TOM输出在下一个周期才同步一起更新CM1,与CN0无关,从而达到新的占空比。
异步更新: 通过直接对CM1寄存器值更新,使得TOM输出可能在本次周期内输出有可能发生改变,当且仅当CNO<CM1时本周期更新,从而达到新的占空比。
ADC基础概念
ADC有多种类型,Delta-Sigma (Σ-Δ) ADC(13位精度),逐次逼近型ADC(Successive Approximation Register ADC,SAR ADC,12bit精度,校准模式±4LSB(校准使得精度提高,开始校准,漂移校准),非校准模式±6LSB)…TC234芯片的ADC模块是逐次逼近型。
逐次逼近型ADC原理:利用了二分搜索算法对模拟输入电压进行量,完成n-bit量化需要n个时钟周期。该转换器有四个模块,一个是采样保持模块,把输入信号进行采样并且保持住;一个是比较器(相当于天平),来比较采样得到的信号和DAC输出的信号他们之间的大小关系;一个是DAC(相当于已知的砝码),使得进入比较器的是信号变成模拟信号;一个是SAR,将2进制的最高位置1得到的数与采样值比较,若小于采样值,则将次高位的权重加上去置为1后得到的数字与采样值进行比较。若该值大于采样值则该位置于0,将下一个二进制的位置为1,直到最低位也被置为1或者0,则逐次逼近得到了与采样值(模拟信号)接近的最终转化后的数字信号。
分辨率是用来描述刻度划分的,而精度是用来描述准确程度的。分辨率越高不是精度越高,两者没有必要联系。
分辨率:表征的ADC的最小刻度的指标,比如5v的8bit的ADC的最小刻度就是5/2^8=0.0195V,即分辨率为0.0195
采样率:指芯片每秒采集信号的个数
转换速率:ADC 每秒能进行采样转换的最大次数,单位是 sps(或 s/s、sa/s,即 samples per second)
波特率
(1):每秒采样获得的点数,例:对a(t)采样,一秒获得了三个点a(1),a(2),a(3),采样率为3SPS,此时采样频率为3Hz。
(2):每秒采样获得的比特数,例:对a(t)采样,一秒获得了三个点a(1),a(2),a(3),每个点以12位二进制量化,采样率为3*12=36SPS,此时波特率为36bps。
LSB:在ADC中表示分辨率
INL(积分非线性):模拟值和真实值之间误差值,假设2v的INL是1LSB,(5.1v,8位,即分成了255份),则1LSB代表0.02v,则信号的真实电压在1.98~2.02之间DNL (微分非线性):ADC相邻两个刻度之间的最大差异,单位是LSB,假定上述 DNL 是 0.5LSB,那么当它的转换结果从 100 增加到 101 时,理想情况下实际电压应该增加 0.02V,但 DNL 为 0.5LSB 的情况下实际电压的增加值是在 0.01~0.03V 之间。
补充:
多路复用器:能接收多个输入信号。
多路选择器:能够根据需要将其中任意一路选出来的电路,叫做数据选择器。
ADC转换过程:
ADC转换过程:
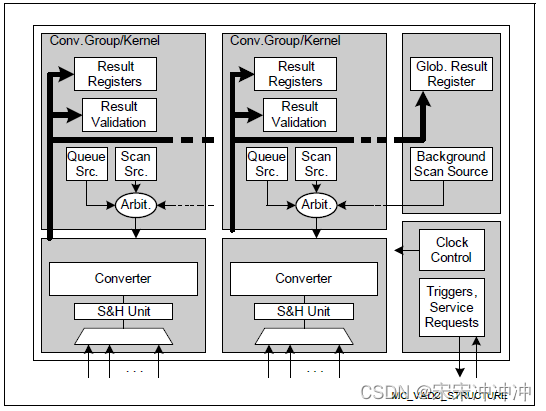
【S&H采集并且保持模拟信号→各个group组选择请求源x(0/1/2/3)扫描/轮询scan/queue模式,并且给每个请求源排出优先级→从仲裁槽0(请求源0队列组)到仲裁槽1(请求源1轮询组)到仲裁槽3进行轮询仲裁,选出最高优先级的group组→软件触发(用API函数来触发)或者硬件触发(TOM模块定时器)ADC转换→ADC转换器量化编码最高优先级的group→转换结果存入组别寄存器或者结果寄存器】→下一轮仲裁轮询,选出次高优先级的group→ADC转换器转化→……
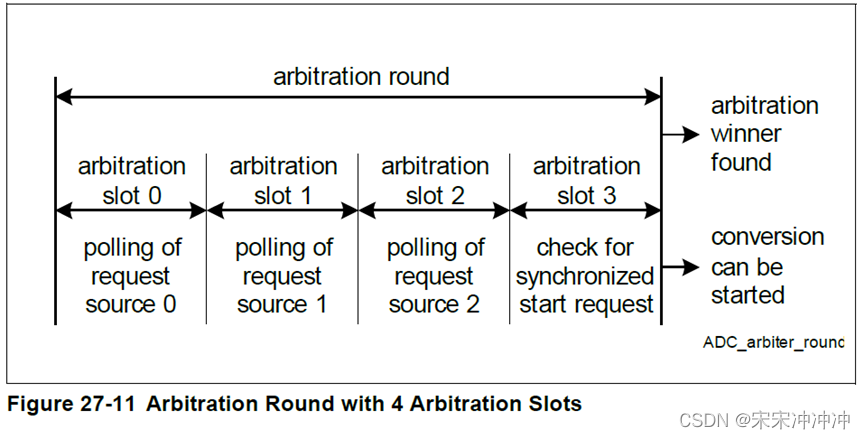
每个请求源被分配到仲裁轮中的某个时隙,称为仲裁时隙。请求源仲裁器定期一个接一个地轮询请求源,以查找挂起的转换请求。一个仲裁轮由每个可用请求源的一个仲裁槽组成。同步源总是在最后一个时隙中进行评估,并且具有比所有其他源更高的优先级。在每轮仲裁结束时,仲裁器确定了最高优先级的转换请求。
仲裁槽0:支持组请求源0 group queue组队列,即REQSRC0_8STG_QUE。 仲裁槽1:支持组请求源1group
scan组扫描,即REQSRC1_NCH_SCAN。
仲裁槽2:支持背景扫描源组请求源2scan扫描模式,即REQSRC2_BGND_SCAN。 仲裁槽3:支持请求源3group
queue模式,仲裁槽3也许也是最后一个仲裁槽:检查同步,来自另一个ADC内核的同步转换请求(在同步从机中以最高优先级处理)。
(1)采样保持:TC234基于带有专用S&HUnit采样保持单元的单独SAR转换器。
(2)触发: 软件触发(代码)和硬件触发(定时器触发)本例定时组选择scan软件触发,即代码触发。硬件触发,由定时器触发,本例同步组选择硬件触发。外部事件触发请求源激活例如通过定时器生成的PWM信号或者port pin产生的信号。
(3)量化编码:ADC逐次逼近转换器完成
模式:单次模式(后续转换重新进行触发) 不选持续模式
DMA模块(Direct Memory Access):
该模块的主要功能是转移数据,将数据从数据源位置传输到数据目的地位置(外设向内存转移数据或者内存向外设转移数据,不需要内核CPU参与)这样转移数据就不用占用CPU资源,CPU可以去处理别的事务从而提高系统的效率(比如操作中断,控制IO口输出)。DMA转移数据的同时,CPU控制IO口输出高低电平。
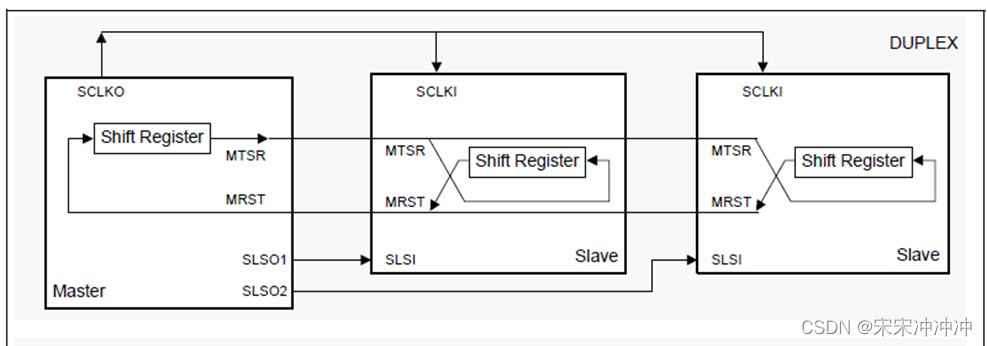
SPI模块:
首先是片选,主机选择通信的从机芯片,根据原理图上的SLSO通道号在EB上选择。其次,是数据传输,在一个时钟周期内传输一个数据,比如选择16bit的传输速率,即时钟在一个周期内会发生16次电平跳变。数据从MTSR信号线从主机向从机输出,经过从机处理,再通MRST信号线反馈给主机。数据传输可以选择时钟极性和时钟相位,时钟极性决定了数据的初始电平,时钟相位决定了数据在第一个还是第二个边沿发生变化。传输数据反映在示波器上是以二进制的形式传输的,数据的二进制形式的最低位对应时钟周期的最后一次跳变,当一次时钟周期结束,数据刚好传输完成,信号线恢复初始电平,经过一小段时间的延迟后,在下一个时钟周期传输下一个数据。
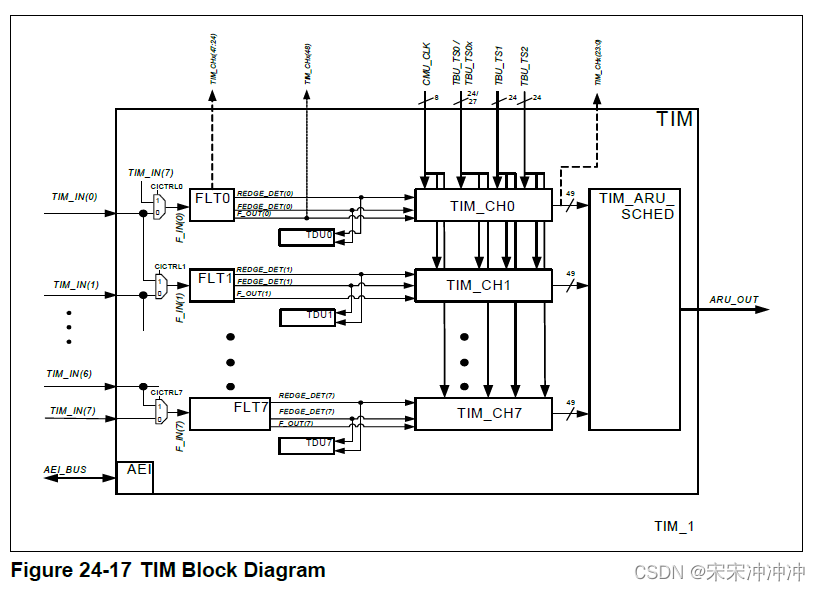
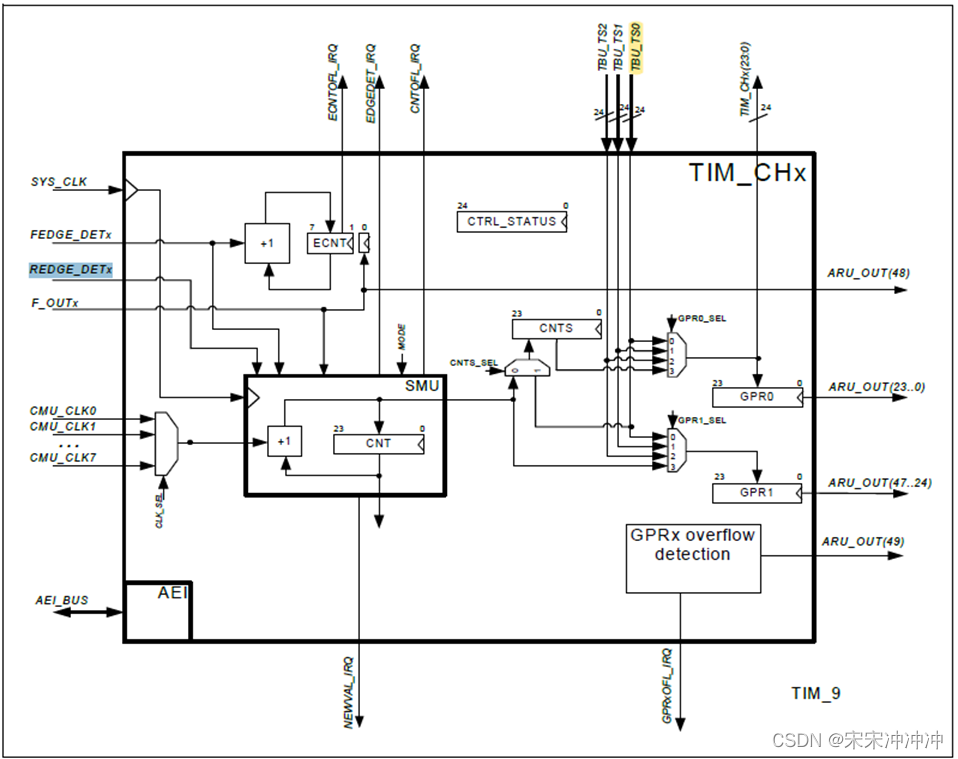
TIM模块:
TIM模块是定时输入模块,一共有八个输入通道,可以用来接受PWM波并识别占空比和周期。一路信号传入TIM模块后,首先经过滤波,可以滤除毛刺,滤波模式有两种,一种是当前滤波器能接受当前通道的信号进行滤波,一种是接受上一个通道的信号进行滤波。滤波模式中的及时边沿传播模式在配置手册中有详解。滤波后产生三路信号,一路是上升沿触发信号,一路是下降沿触发信号,一路是与输入信号相差不大的较为完整的信号。上边沿和下降沿触发信号进行超时检测来判断信号是否稳定和可靠。
三路信号传入TIM通道模块,选择CMU时钟驱动计数器,从上升沿到下降沿的计数值被传输到GRR0中,从一个上升沿到另一个上升沿的计数值被记录到GPR1中,也就是GPR0记录了占空比,GPR1记录了周期。故TIM能识别不同的PWM波。

















 1058
1058

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









