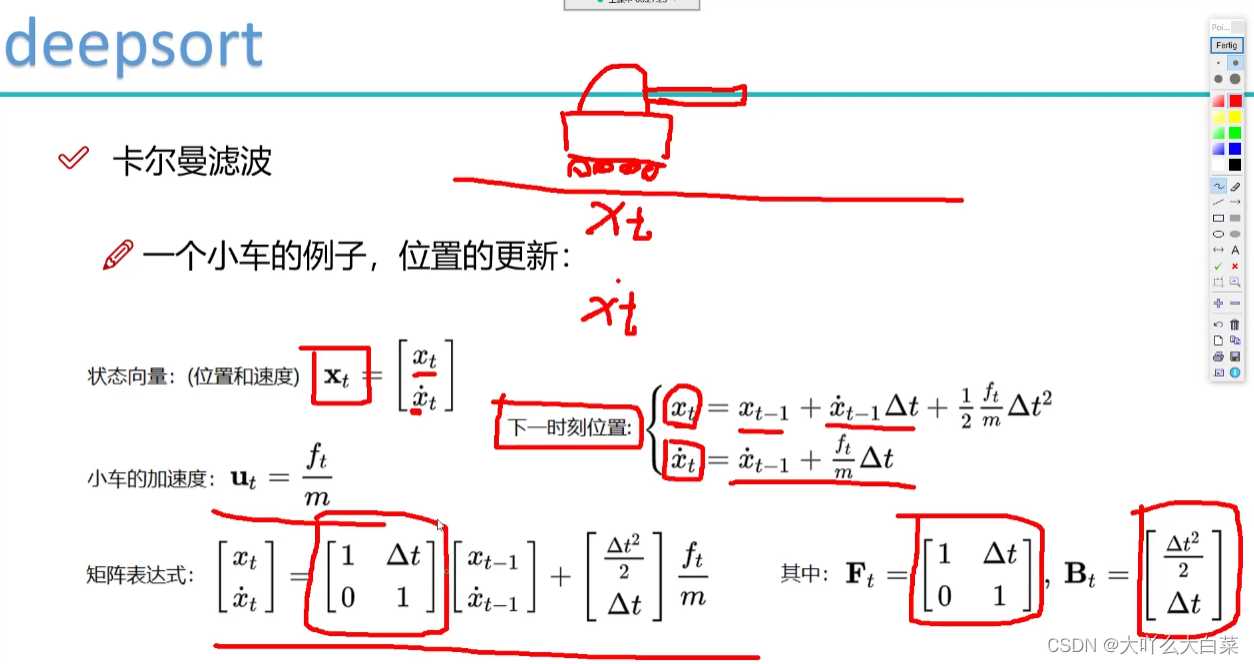
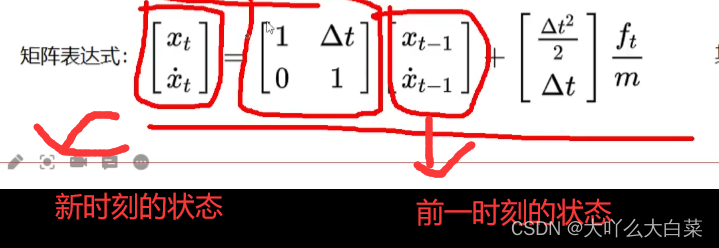
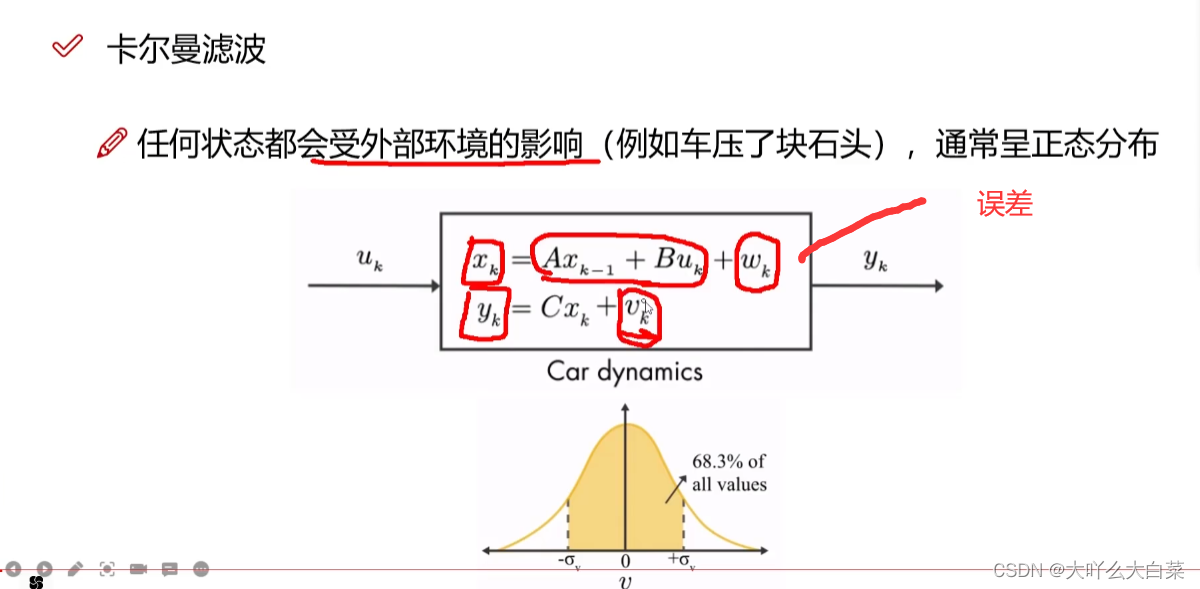
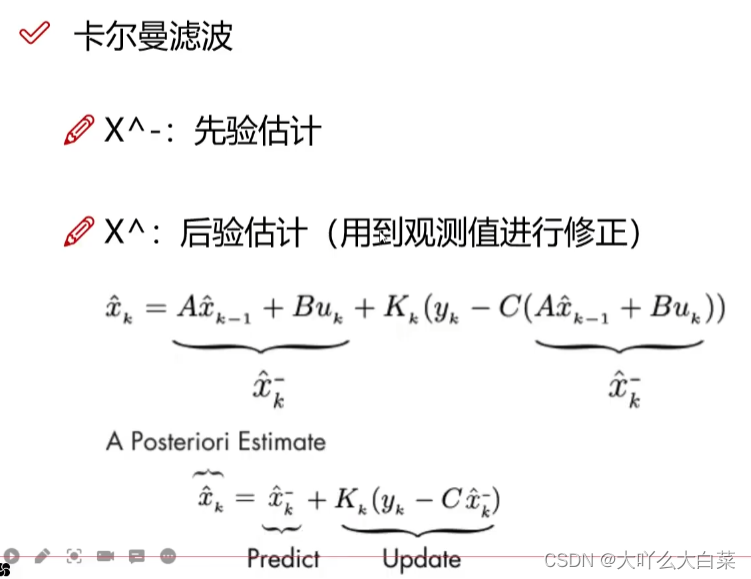
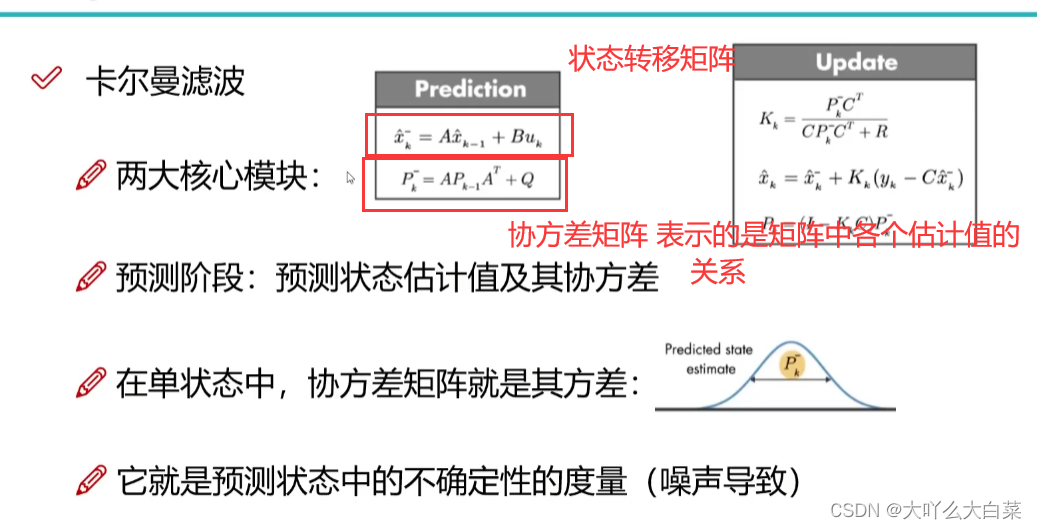
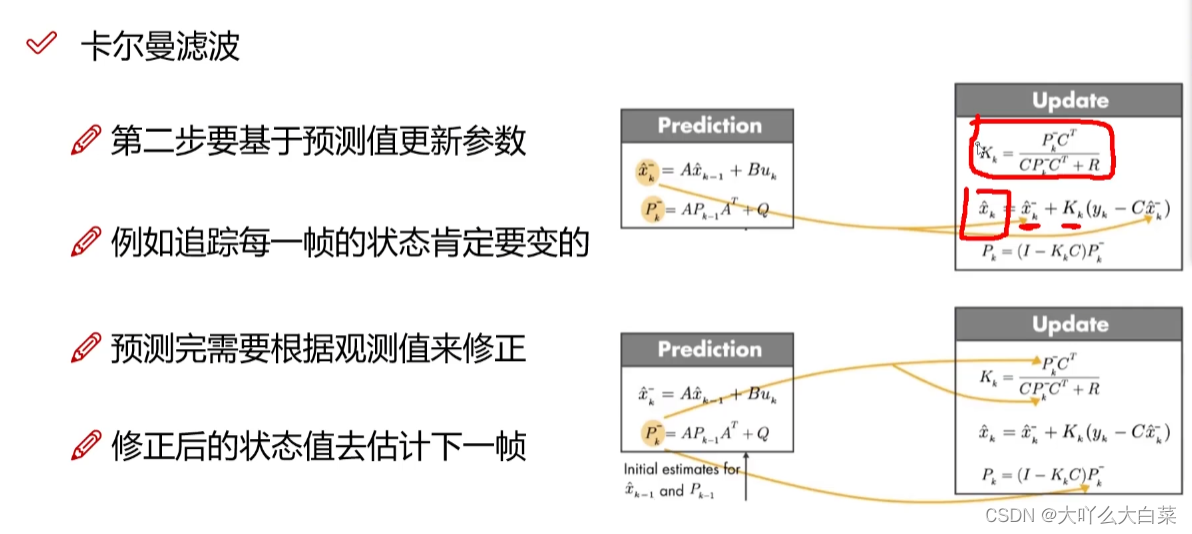
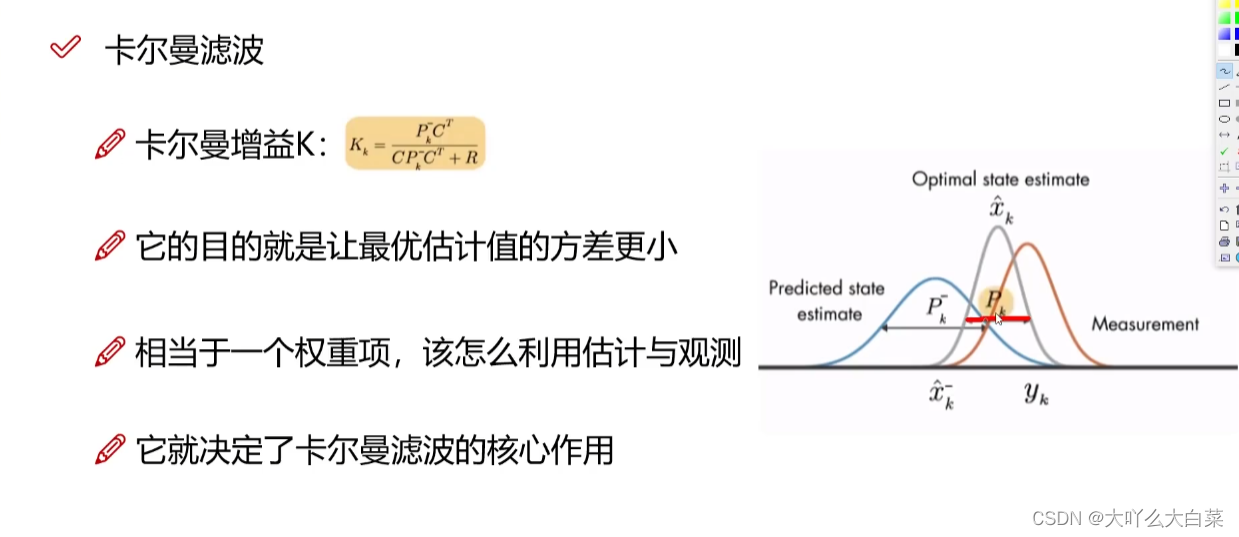
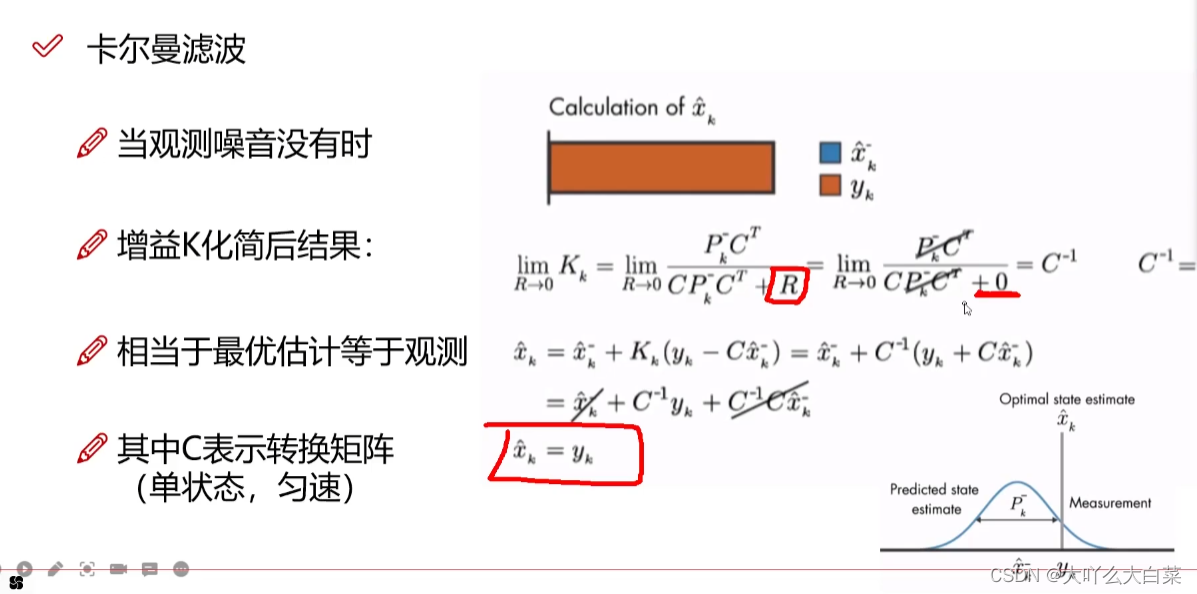
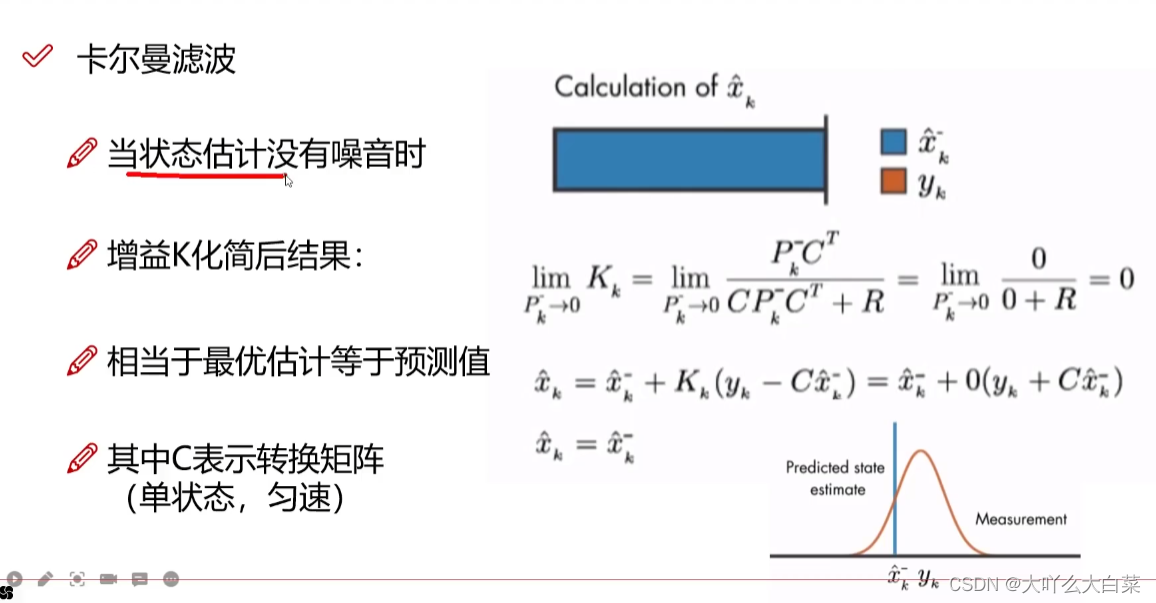
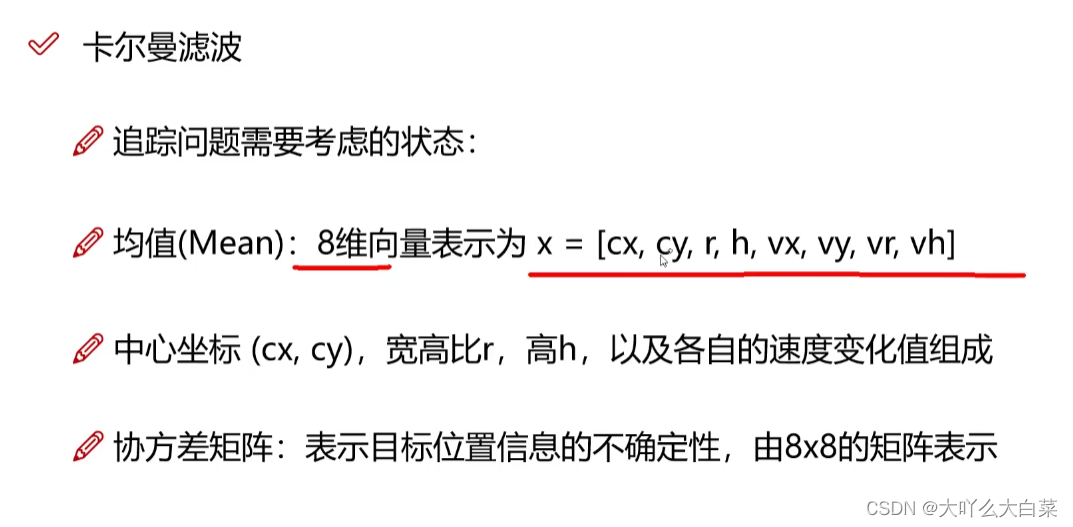
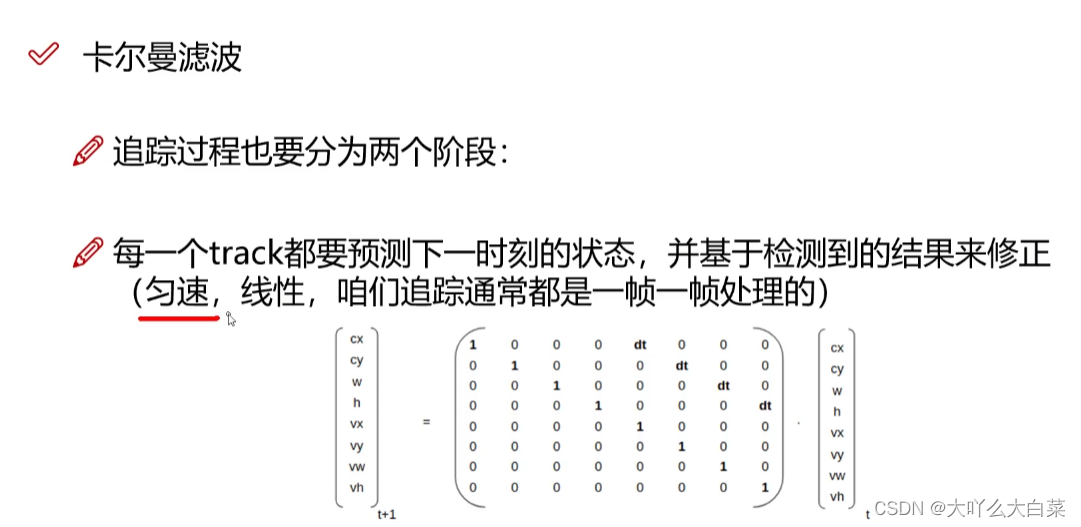
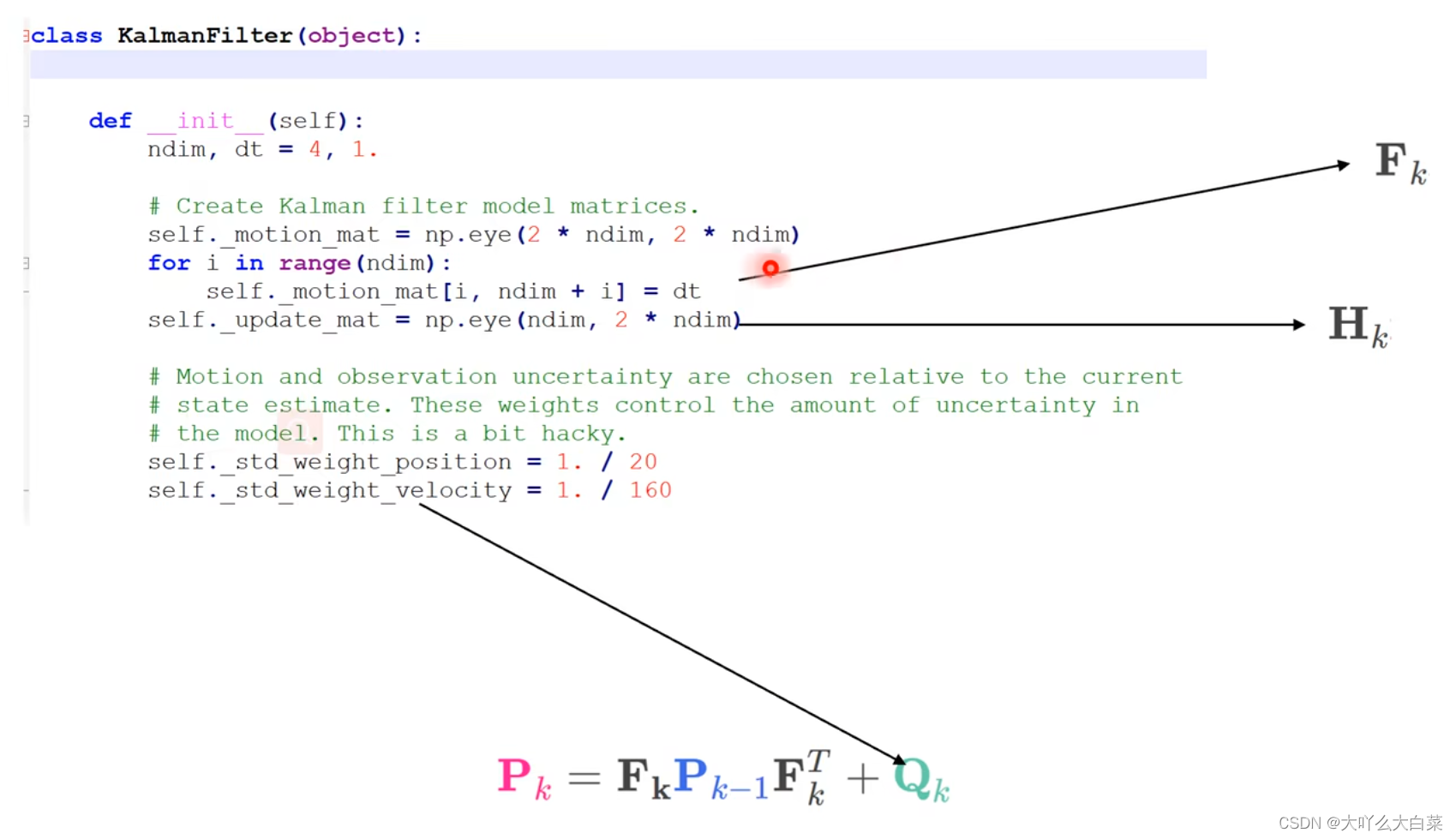
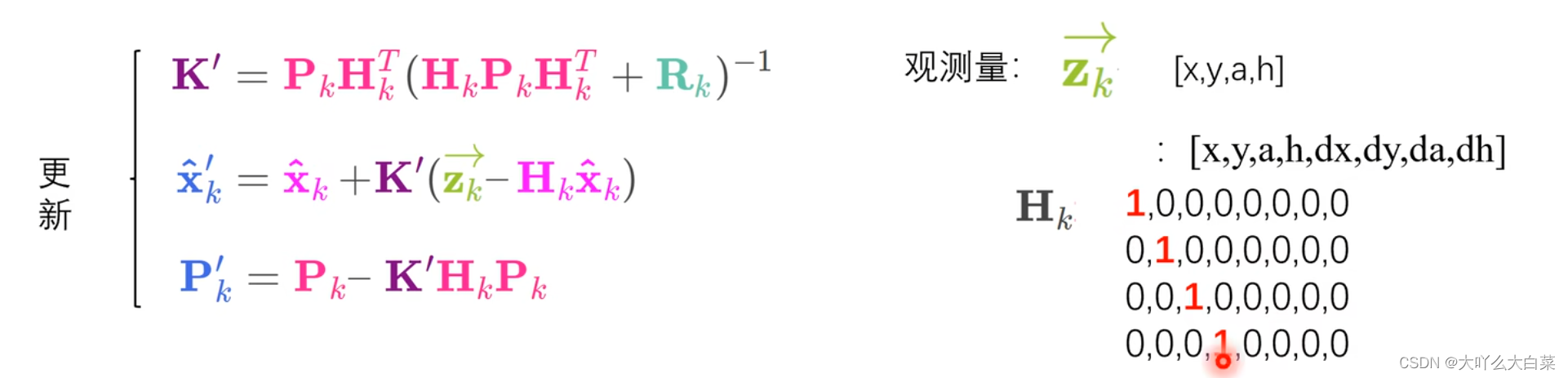
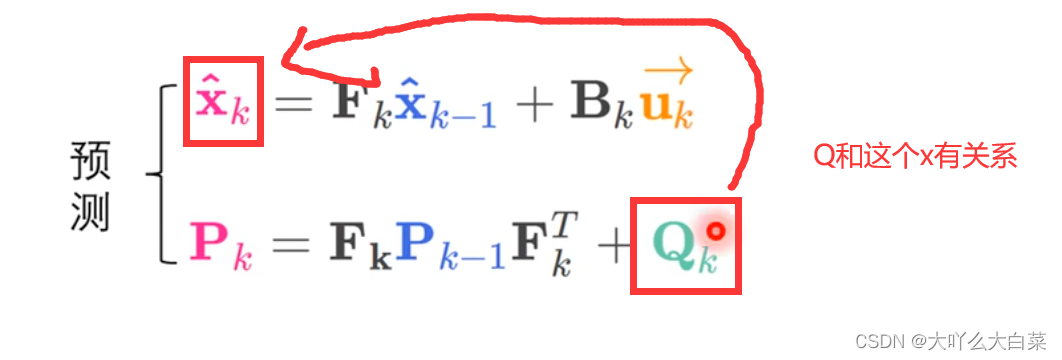
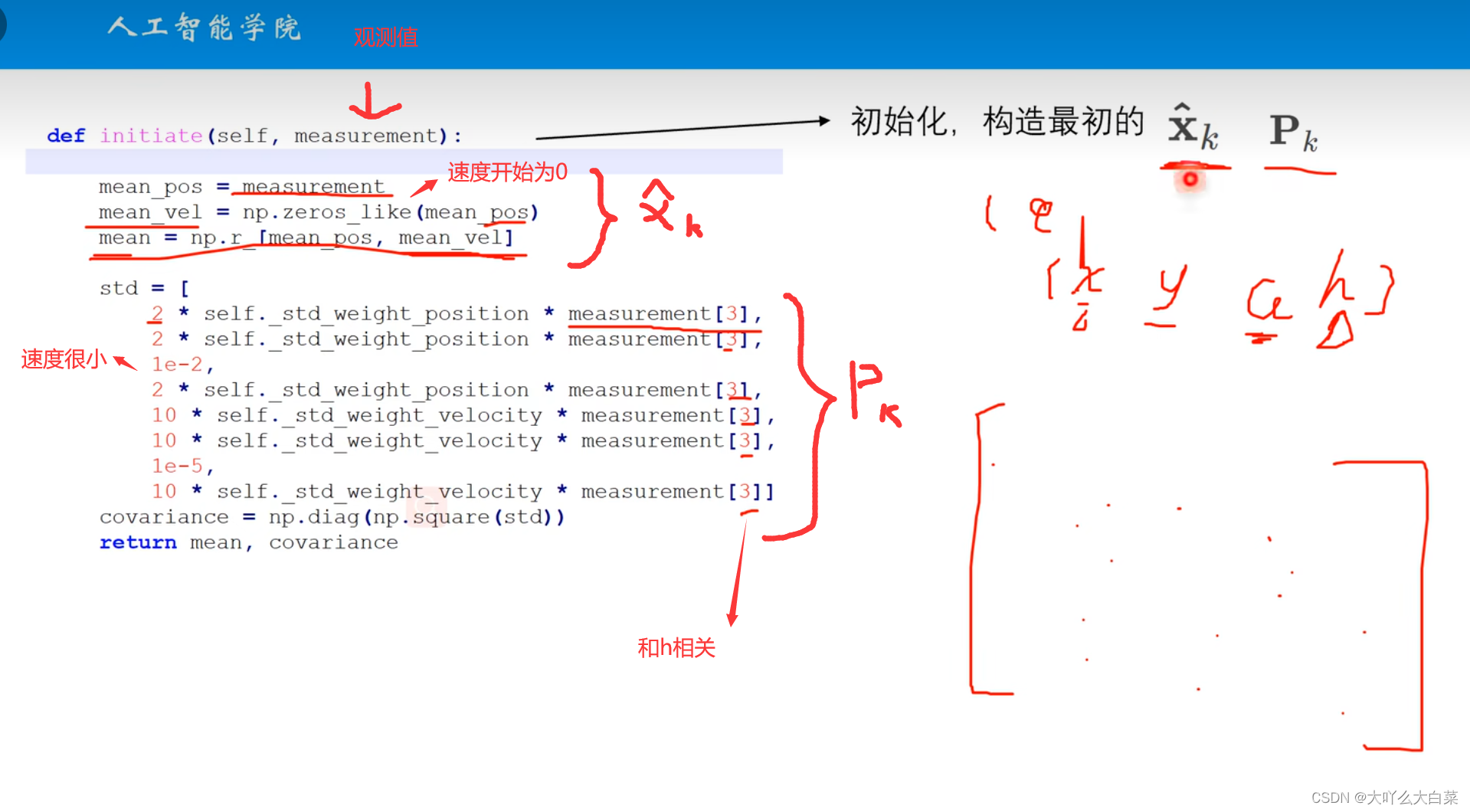
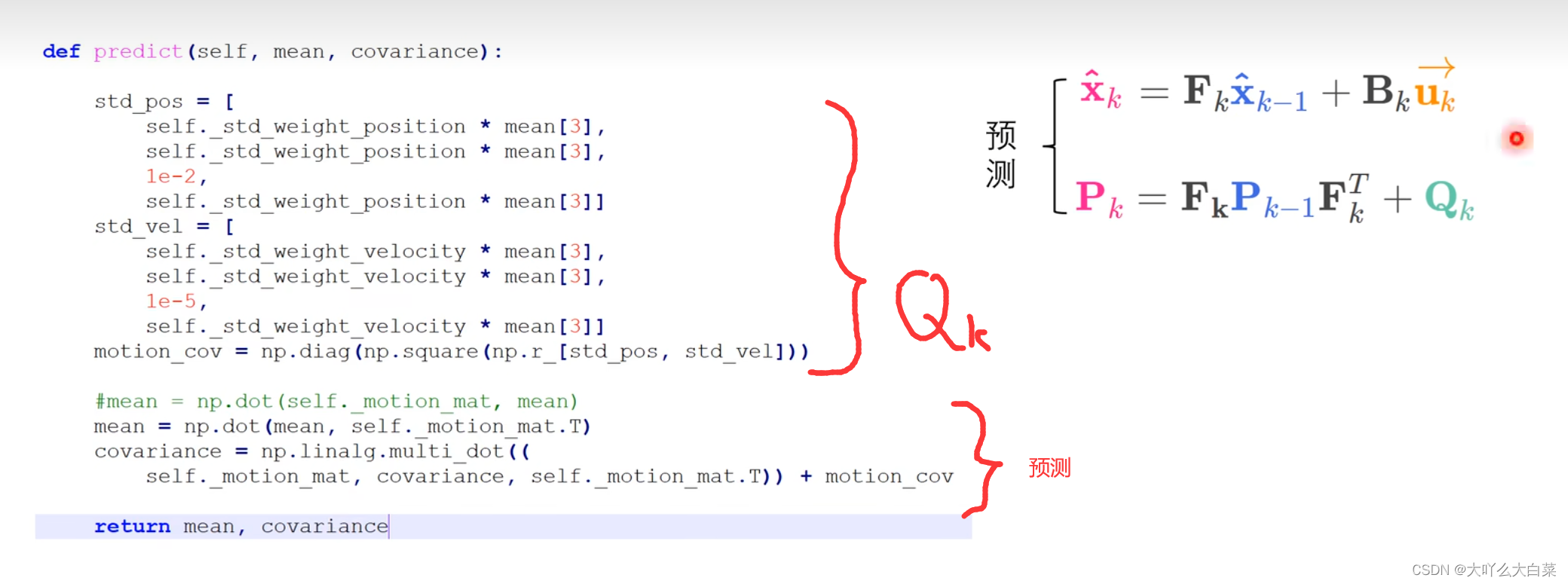
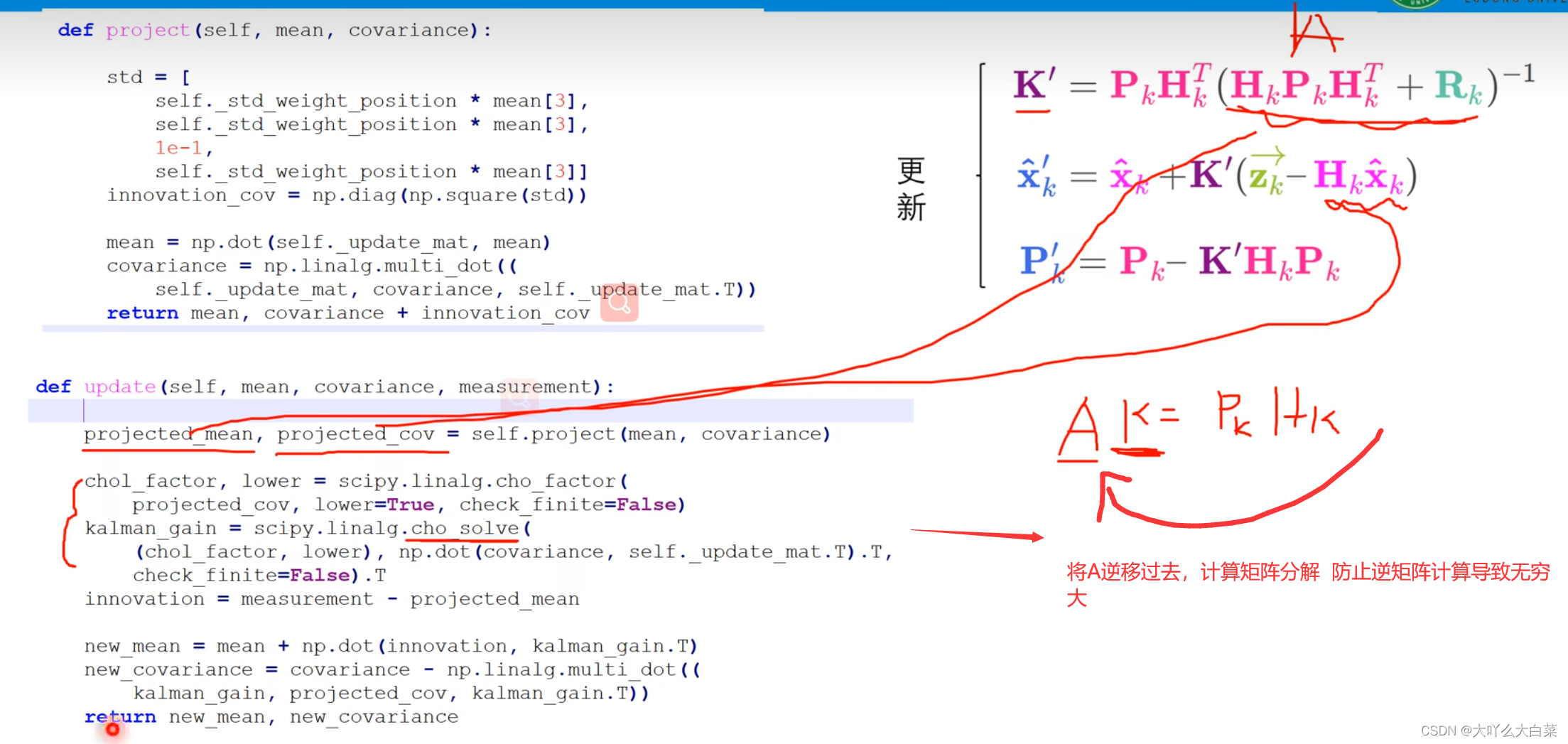
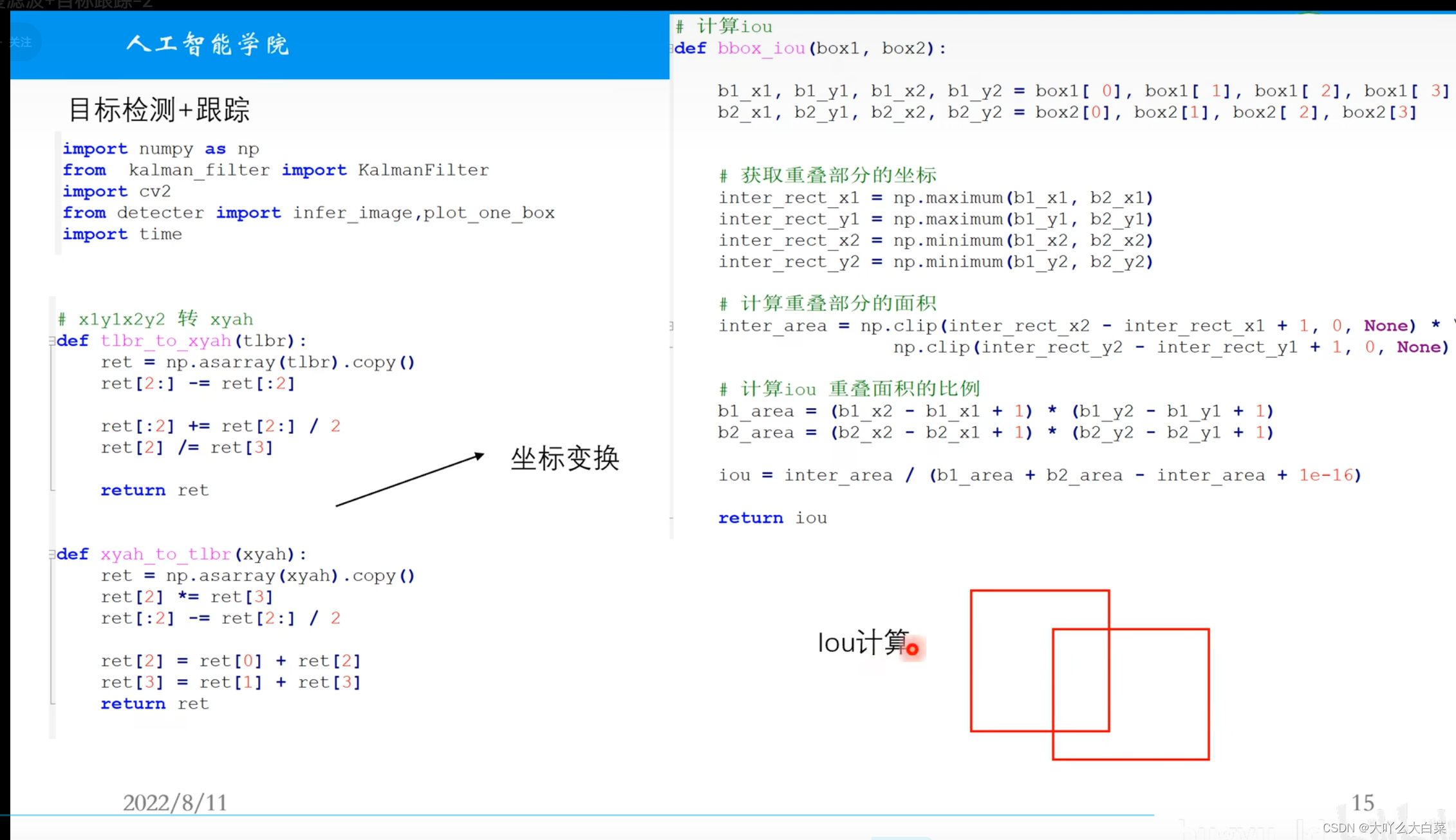
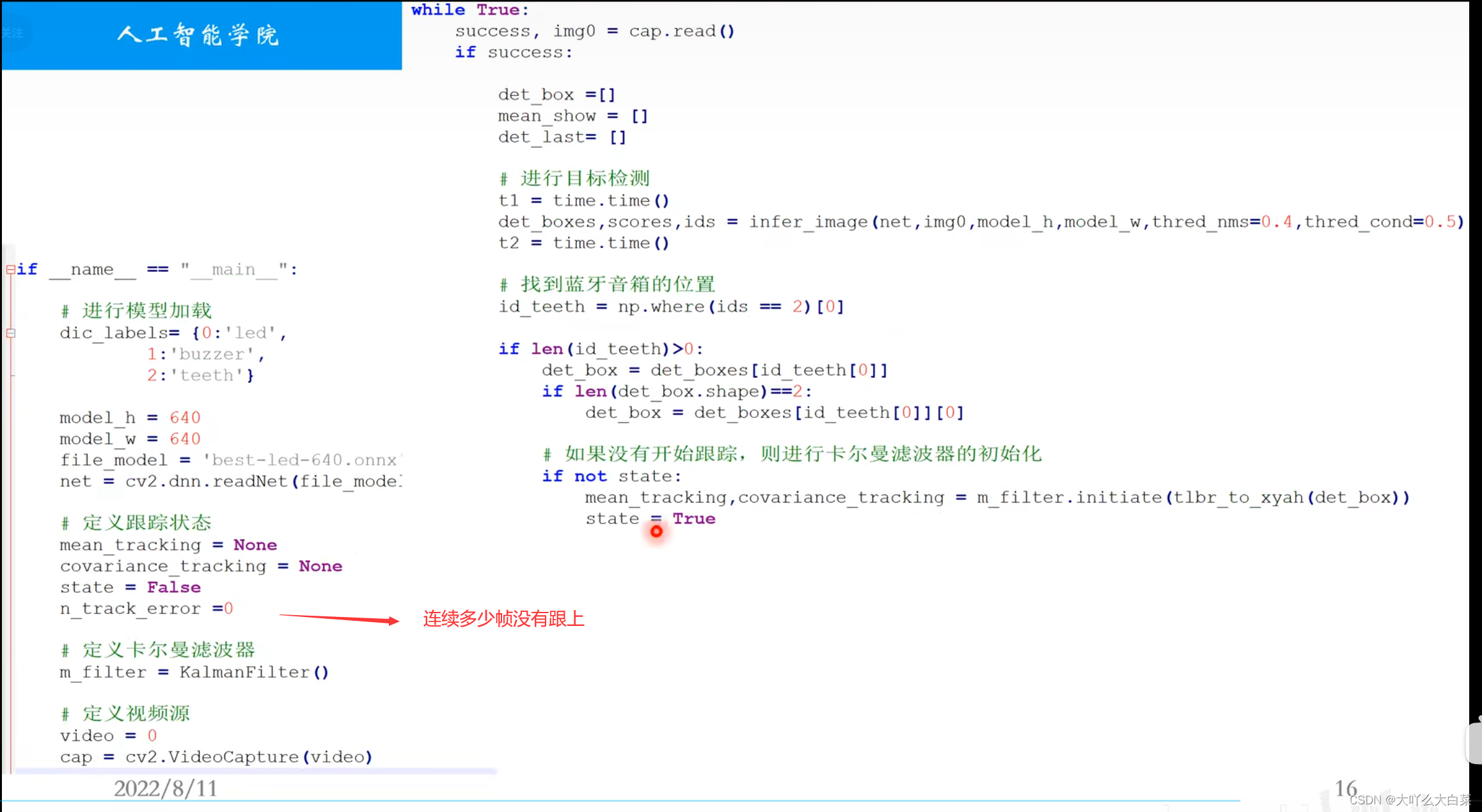
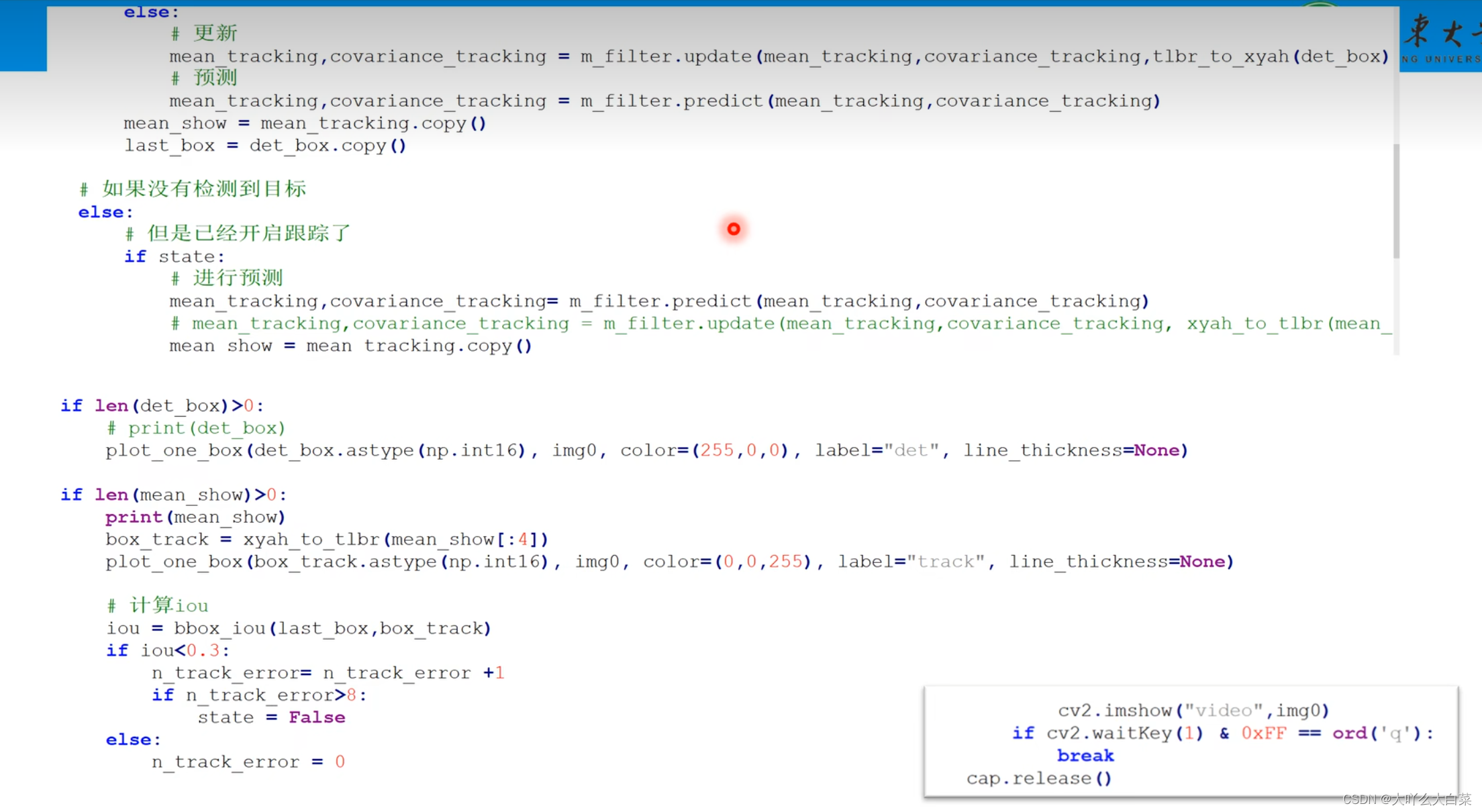
卡尔曼滤波 由状态转移矩阵决定位置的更新 无论是位置还是速度都会受到当前状态的影响 有外界干扰。 卡尔曼滤波本质上就是基于估计值和观测值进行综合(如下一帧预测值和下一帧检测值) 状态转移矩阵乘以当前状态就是先验估计,也就是根据上一时态估计下一时态的结果,yk就是传感器(就是检测框),Kk就是卡尔曼增益 就是一个权重,用来综合调整估计值和观测值 P由协方差矩阵和噪音矩阵(Q)组成 r就是h/w 代码应用 Qk和x有关系,x会乘以此节中的第一个图的权重系数,估计出一个Qk出来 初始化 这是最初的xk和Pk 预测 总体过程























 82
82











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






